Алгебраическое суммирование в схемах на ВТ можно осуществить по принципу суммирования напряжений и по принципу суммирования токов (магнитных потоков).
Для суммирования напряжений выходные обмотки ВТ соединяются последовательно, как показано на рис. 3.4,а. При согласном включении обмоток выходное напряжение  при встречном включении
при встречном включении 
а)
б)
Рис.3.4. Алгебраическое суммирование на ВТ
Пусть выходные напряжения синусных обмоток ВТ1н ВТ2 представляют в некотором масштабе m1 и m2 величины Х1 и Х2, а суммарное напряжение в масштабе mY - величину Y:

В этом случае
 (3.1)
(3.1)
При условии:  зависимость (3.1) примет вид:
зависимость (3.1) примет вид:
 (3.2)
(3.2)
Для того, чтобы в выражении (3.1) величина Y была равна сумме величин Х1 и Х2, необходимо обеспечить равенство масштабов m1, m2 и my . Тогда масштаб суммы будет равен масштабу слагаемых.
Для уравнивания масштабов слагаемых напряжений применяются масштабные трансформаторы (МТ). В отличие от ранее рассмотренных СКВТ и ЛВТ, они снабжены устройством, обеспечивающим фиксацию ротора в определенном положении.
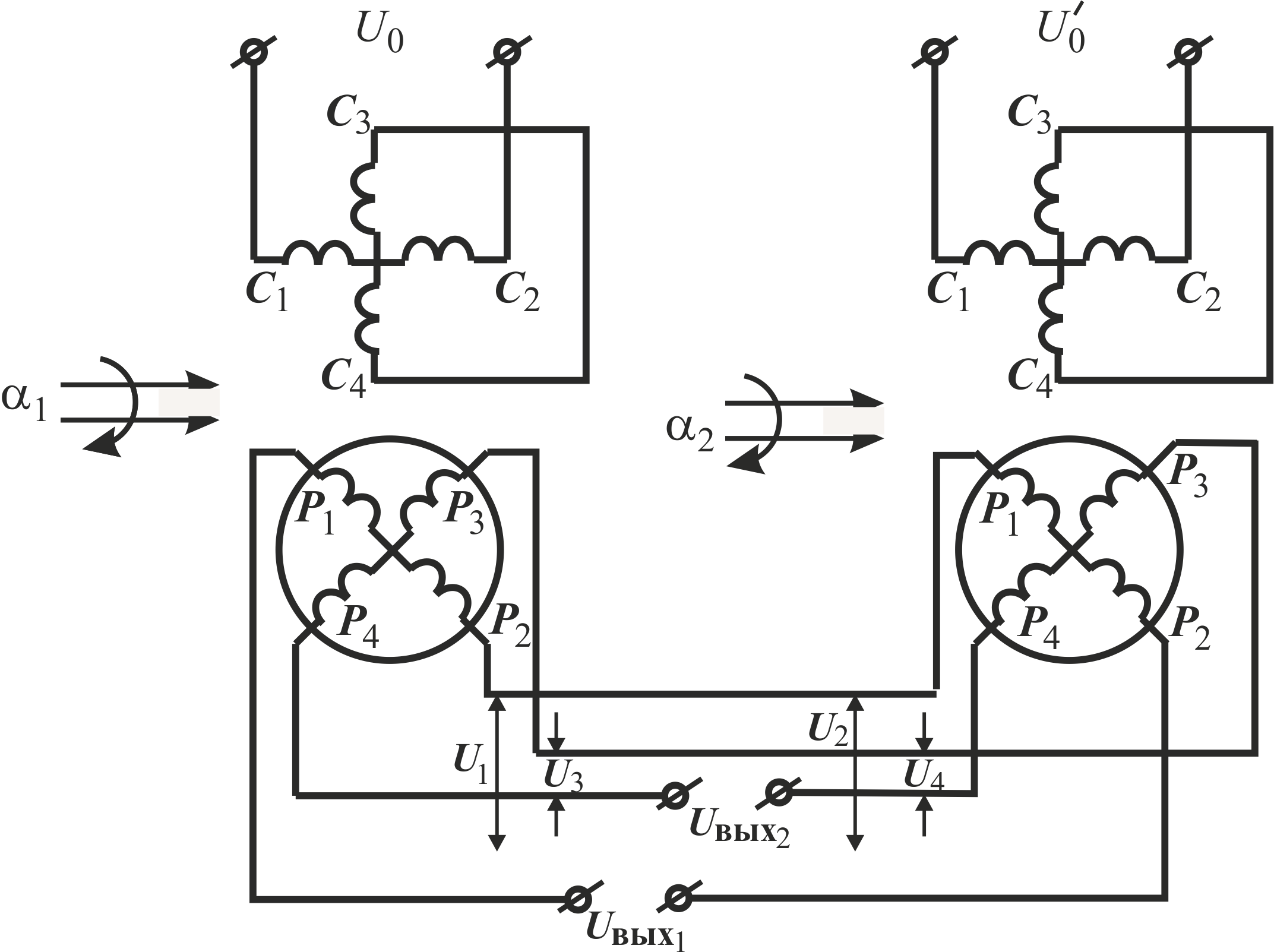
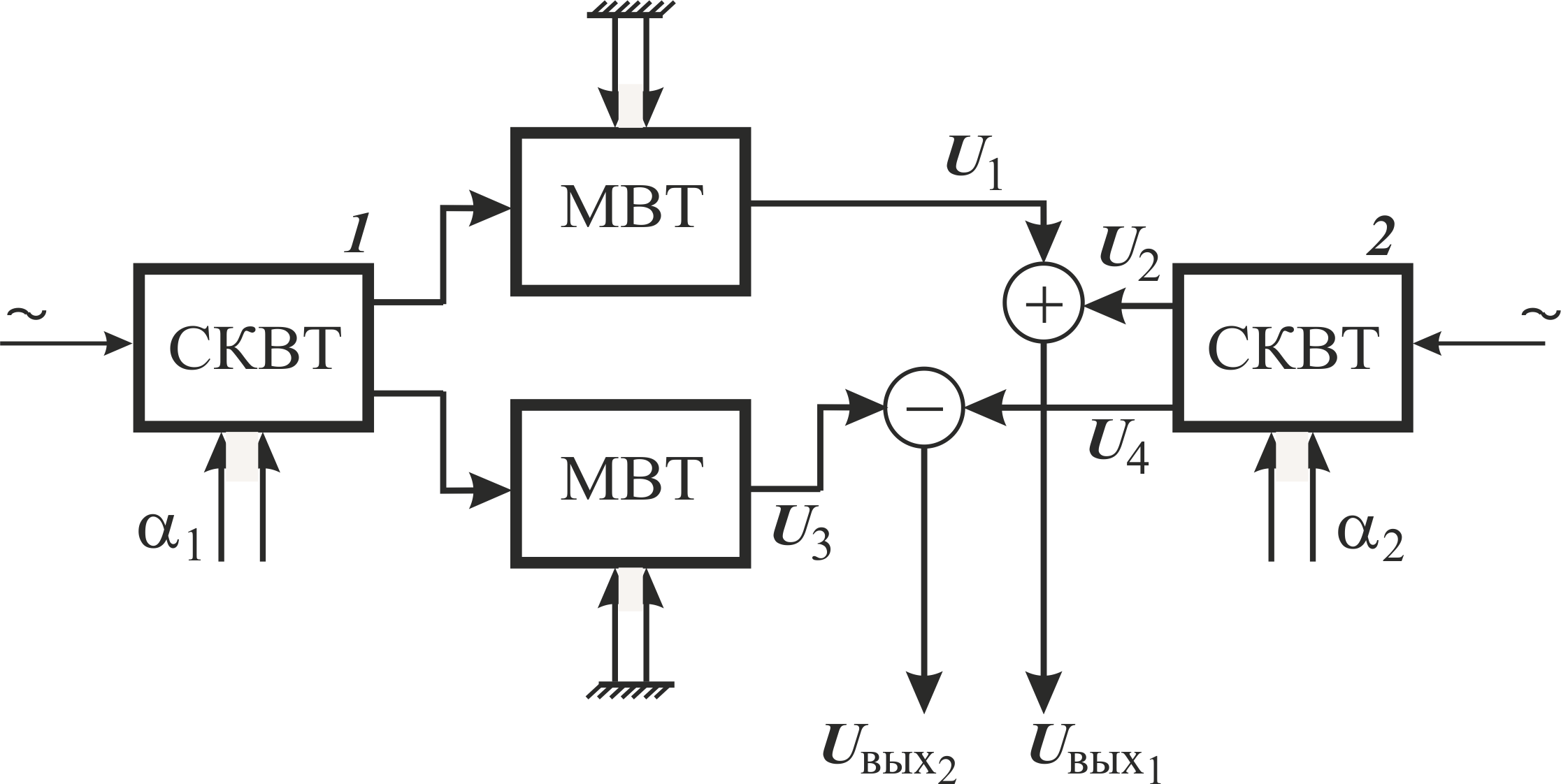
Схема суммирования двух величин, основанная на суммировании магнитных потоков, приведена на рис. 3.5.
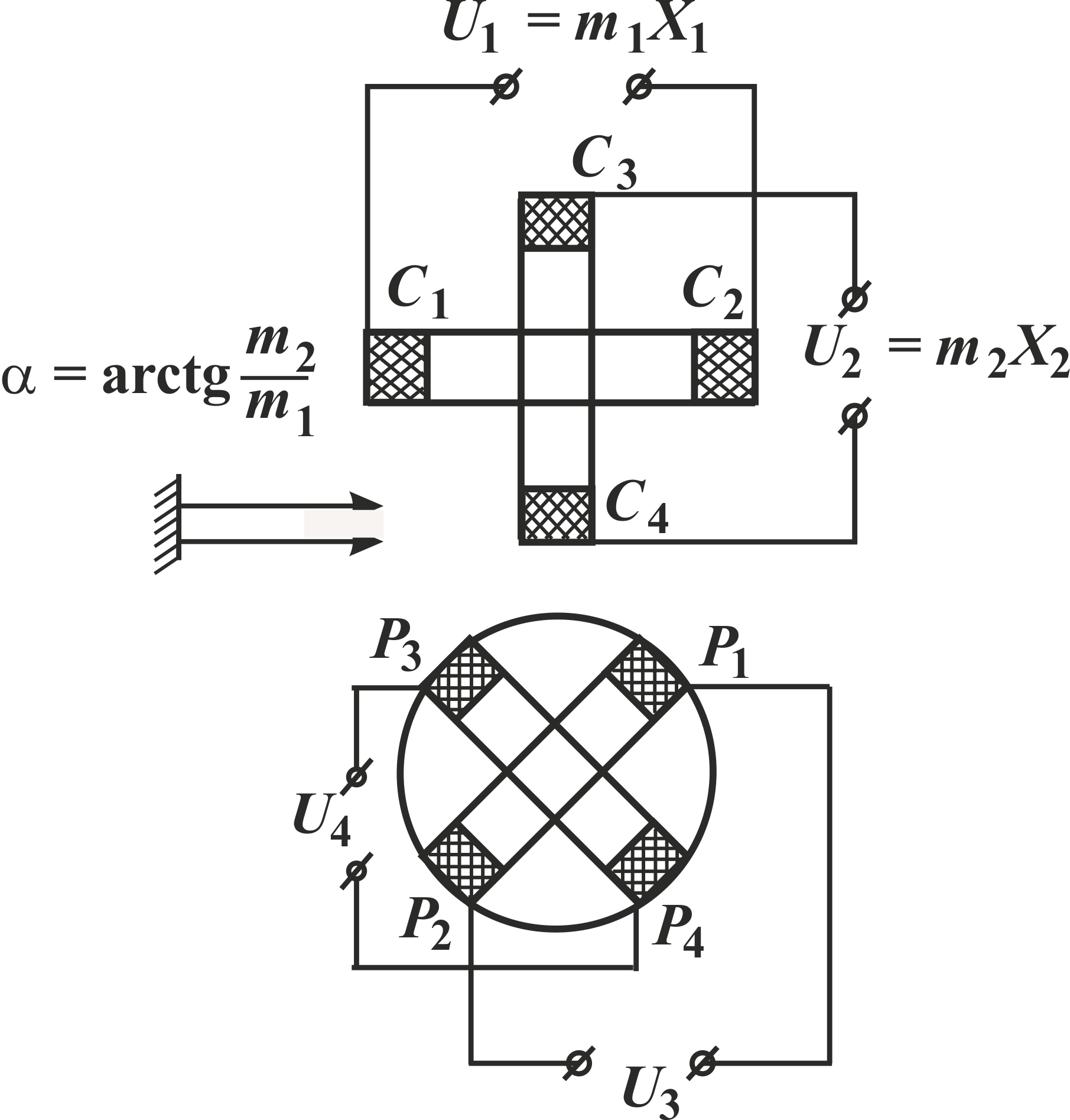
Рис.3.5. Суммирование магнитных потоков с использованием МВТ
Если на обмотку возбуждения МВТ подать напряжение, пропорциональное одному слагаемому  , а на квадратурную обмотку - напряжение, пропорциональное второму слагаемому
, а на квадратурную обмотку - напряжение, пропорциональное второму слагаемому  , то в соответствии с выражением (3.1) выходное напряжение ВТU3 будет пропорционально сумме величин X1 и Х2, взятых в определенных масштабах:
, то в соответствии с выражением (3.1) выходное напряжение ВТU3 будет пропорционально сумме величин X1 и Х2, взятых в определенных масштабах:
 . (3.3)
. (3.3)
Суммирование двух величин возможно только при условии равенства масштабов слагаемых величин. Условие равенства масштабов величин X1 и Х2 определим из выражения

откуда
 (3.4)
(3.4)
Следовательно, для выравнивания масштабов суммируемых величин X1 и Х2 ротор МВТ, решающий задачу суммирования, должен быть развернут на уголa, определяемый формулой (3.4).
При суммировании в схемах на ВТ складываются мгновенные значения напряжений или потоков. Поэтому для получения правильного результата суммируемые напряжения не должны иметь сдвига фаз несущих напряжений. При сдвиге фаз необходимо произвести фазирование суммируемых напряжений. Для устранения фазового сдвига применяют фазирующие элементы. В этих целях часто используется фазирующий элемент, который представляет собой переменное активное сопротивление, включаемое последовательно в цепь возбуждения последнего ВТ в каскаде.
3.1.3. Умножение с помощью схем на ВТ
Операция умножения одна из самых распространенных в навигационных СУ. Например, чтобы определить пройденное кораблем расстояние необходимо получить произведение скорости V на время Т.
В схемах на ВТ в качестве элементов, выполняющих операцию умножения, используются вращающиеся трансформаторы, асинхронные тахометры. Схема умножения на ЛВТ приведена на рис. 3.6,а(схема функциональная) и на рис.3.6,б (схема электрическая, выполненная в соответствии с ГОСТ 7624-62).
В силу линейности выходного напряжения ЛВТ от угла поворота его ротора можно записать
 (3.5)
(3.5)
где  - максимальный угол поворота ротора ЛВТ, лежащий в пределах линейного участка выходной характеристики ЛВТ.
- максимальный угол поворота ротора ЛВТ, лежащий в пределах линейного участка выходной характеристики ЛВТ.
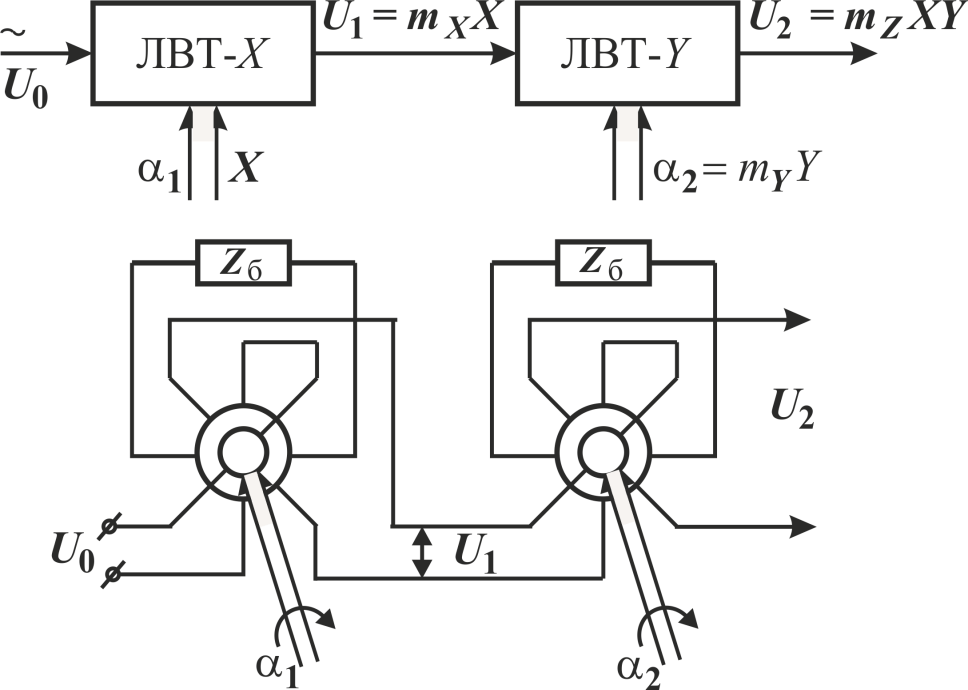
Рис. 3.6. Умножение с применением ЛВТ
Из выражения (3.5) следует, что если принять
 и
и  ,
,
то ЛВТ позволяет получить произведение 
Действительно,
 или
или  ,
,
где  - масштаб произведения, определяемый по формуле
- масштаб произведения, определяемый по формуле
 и
и  - масштабные коэффициенты сомножителей, определяемые по формулам:
- масштабные коэффициенты сомножителей, определяемые по формулам:
 ,
,  - пределы изменения сомножителей.
- пределы изменения сомножителей.
3.1.4. Тригонометрические преобразования с
использованием ВТ
Вращающиеся трансформаторы позволяют выполнять следующие операции с векторами:
- разложение вектора на составляющие, или преобразование полярных координат в прямоугольные;
- построение вектора по двум составляющим, или преобразование прямоугольных координат в полярные;
- поворот осей координат.
Рассмотрим эти операции.
Разложение вектора на составляющие. Схема разложения вектора на составляющие в прямоугольной системе координат показана на рис. 3.7. Как видно из рисунка, разложение вектора скорости  на составляющие сводится к определению величин
на составляющие сводится к определению величин  и
и  .
.
Модуль вектора дистанции  поступает в форме угла поворота и вызывает вращение ротора ЛВТ-Д. Выходное напряжение ЛВТ будет
поступает в форме угла поворота и вызывает вращение ротора ЛВТ-Д. Выходное напряжение ЛВТ будет  . Аргумент вектора Д (пеленг П) поступает на поворот ротора СКВТ-П. На выходе СКВТ-П имеем:
. Аргумент вектора Д (пеленг П) поступает на поворот ротора СКВТ-П. На выходе СКВТ-П имеем:
 (3.6)
(3.6)
где
 – масштаб дистанции;
– масштаб дистанции;
 ;
;  - масштабы составляющих вектора
- масштабы составляющих вектора  .
.
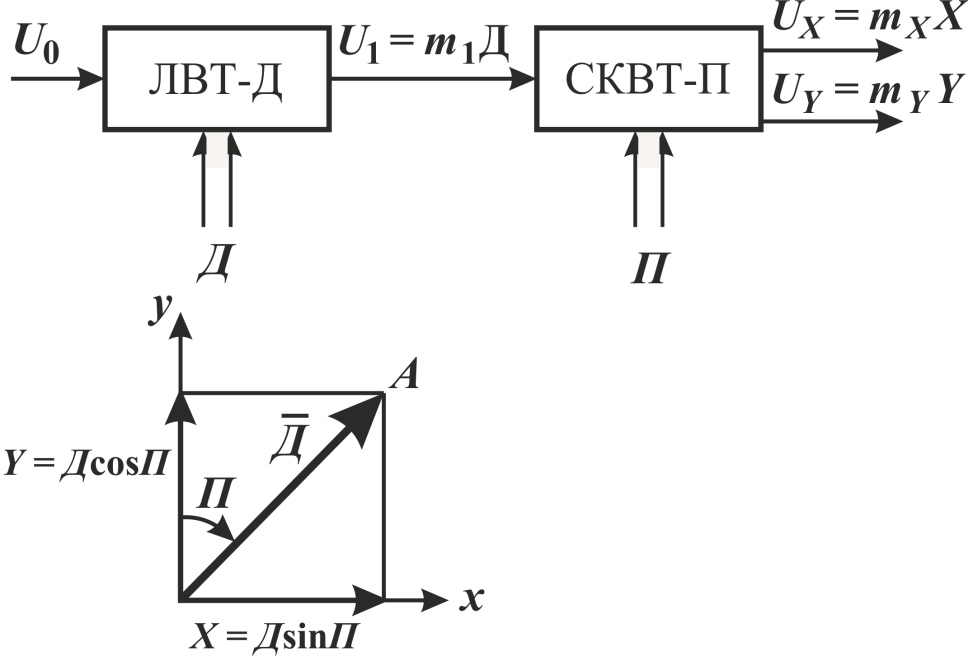
Рис. 3.7. Разложение вектора на составляющие с использованием ВТ
Разложение вектора на составляющие можно рассматривать как преобразование полярных координат в прямоугольные. Действительно, положение точки А в полярной системе координат характеризуется модулем вектора Д и его аргументом П. Из рис. 3.7 видно, что положение точки А в прямоугольной системе координат XOY определяется абсциссой  и ординатой
и ординатой  .
.
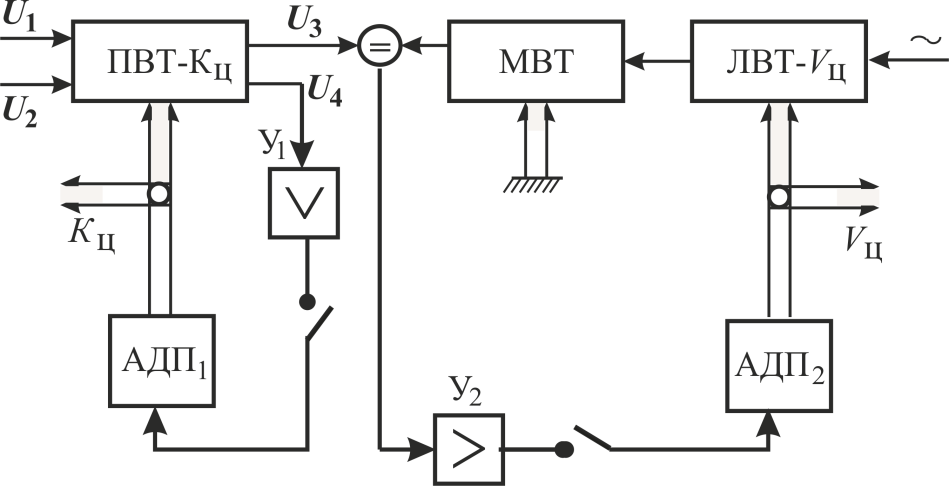
Рис.3.8. Построение вектора с использованием ВТ
Построение вектора по его составляющим можно выполнить по схеме рис.3.8. В этой схеме вращающийся трансформатор работает в режиме построителя вектора (ПВТ).
Построение вектора по его составляющим рассмотрим на примере определения вектора скорости цели  :
:
 и
и 
Модуль вектора скорости в этом случае определится по формуле
 (3.7)
(3.7)
а его аргумент, курс цели  ,- по формуле
,- по формуле
 . (3.8)
. (3.8)
Составляющая скорости цели  в виде напряжения
в виде напряжения  поступает на обмотку возбуждения ПВТ, а на его квадратурную обмотку поступает напряжение
поступает на обмотку возбуждения ПВТ, а на его квадратурную обмотку поступает напряжение  , пропорциональное составляющей
, пропорциональное составляющей  . В этом случае выходное напряжение ВТ будет:
. В этом случае выходное напряжение ВТ будет:
 (3.9)
(3.9)
Если повернуть ротор ПВТ-КЦ в положение, при котором  будет равно нулю, то из выражения (3.9) можно получить
будет равно нулю, то из выражения (3.9) можно получить
 (3.10)
(3.10)
Учитывая (3.9) и имея в виду, что
 и
и 
выражение (3.7) при этих условиях можно записать:
 (3.11)
(3.11)
Сравнивая (3.8) с (3.10), а (3.11) с (3.13), видим их полную аналогию. Выражения (3.10) и (3.11) показывают, что если на первичные обмотки ПВТ подать напряжения  и , пропорциональные составляющим вектора, например и
и , пропорциональные составляющим вектора, например и  , и развернуть ротор ВТ в положение, при котором напряжение одной из выходных обмоток равно нулю, то напряжение, снимаемое с другой обмотки ПВТ, в некотором масштабе определит модуль вектора, а положение ротора определит аргумент вектора.
, и развернуть ротор ВТ в положение, при котором напряжение одной из выходных обмоток равно нулю, то напряжение, снимаемое с другой обмотки ПВТ, в некотором масштабе определит модуль вектора, а положение ротора определит аргумент вектора.
Действительно, в результате действия напряжений , и, создаваемых ими токов  и
и  , образуются магнитные потоки статора, действующие по продольной и поперечной осям ВТ и пропорциональные составляющим вектора. Суммирование этих потоков дает результирующий магнитный поток, величина и направление которого характеризуют величину и направление искомого вектора. Для измерения этого потока ротор ВТ необходимо развернуть так, чтобы магнитная ось одной из его обмоток была параллельна потоку, а ось другой обмотки – перпендикулярна потоку. В этом случае напряжение на первой обмотке будет пропорционально модулю вектора, а положение ротора определит направление действия вектора- его аргумент.
, образуются магнитные потоки статора, действующие по продольной и поперечной осям ВТ и пропорциональные составляющим вектора. Суммирование этих потоков дает результирующий магнитный поток, величина и направление которого характеризуют величину и направление искомого вектора. Для измерения этого потока ротор ВТ необходимо развернуть так, чтобы магнитная ось одной из его обмоток была параллельна потоку, а ось другой обмотки – перпендикулярна потоку. В этом случае напряжение на первой обмотке будет пропорционально модулю вектора, а положение ротора определит направление действия вектора- его аргумент.
Решение этой задачи происходит автоматически, как показано на рис. 3.8. Поворот ротора ПВТ в положение, при котором  , выполняется с помощью следящей системы, состоящей из усилителя
, выполняется с помощью следящей системы, состоящей из усилителя  и исполнительного двигателя АДП1. Преобразование сигнала
и исполнительного двигателя АДП1. Преобразование сигнала  в механическое перемещение осуществляется расшифровывающей следящей системой, состоящей из усилителя
в механическое перемещение осуществляется расшифровывающей следящей системой, состоящей из усилителя  , исполнительного двигателя АДП2 и ЛВТ-V Ц.
, исполнительного двигателя АДП2 и ЛВТ-V Ц.
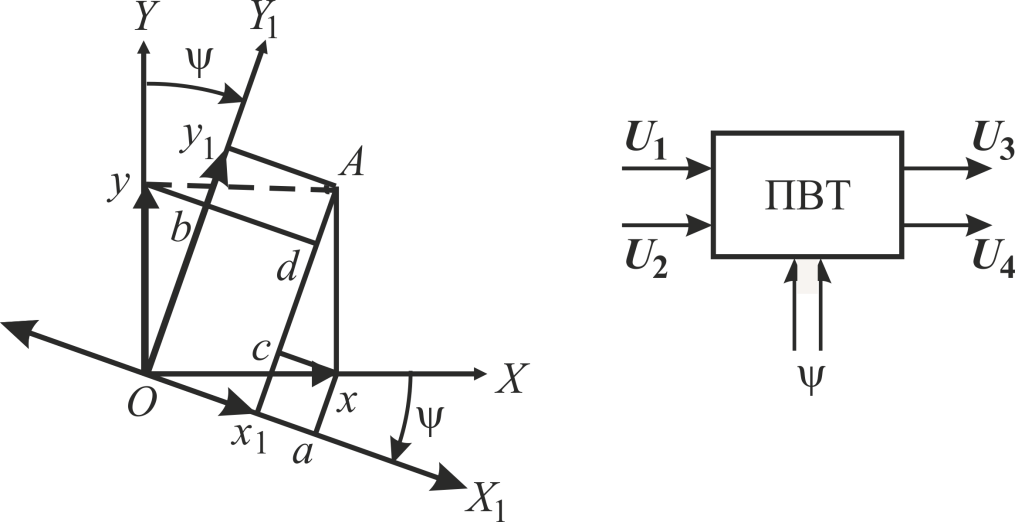
Поворот осей координат. Схема поворота осей координат с помощью ВТ показана на рис. 3.9.
а) б)
Рис. 3.9. Поворот осей координат
Из рис. 3.9,а видно, что при повороте осей координат XOY на угол y координаты точки А(х, у) в новой системе X1OY1, определяются равенствами:
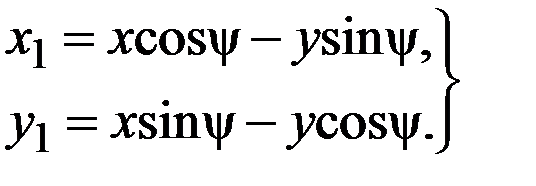 (3.12)
(3.12)
Для схемы, показанной на рис. 3.9,б, выходные напряжения ВТ будут равны:
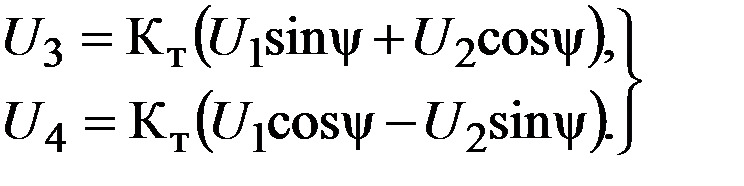 (3.13)
(3.13)
Положим, что напряжение пропорционально координате х, напряжение  пропорционально координате у, и угол поворота осей координат равен углу поворота ротора ВТ. В этом случае, как видно из сравнения (3.9) и (3.10), - выходные напряжения
пропорционально координате у, и угол поворота осей координат равен углу поворота ротора ВТ. В этом случае, как видно из сравнения (3.9) и (3.10), - выходные напряжения  и
и  в некотором масштабе будут представлять координаты точкиА в новой системе координат X1OY1.
в некотором масштабе будут представлять координаты точкиА в новой системе координат X1OY1.
3.1.5. Дифференцирование и интегрирование с
использованием ВТ
Основным элементом, обеспечивающим решение задачи дифференцирования и интегрирования, является асинхронный тахометр. Дифференцирование по временному аргументу может быть выполнено с помощью схемы, приведенной на рис.3.10.
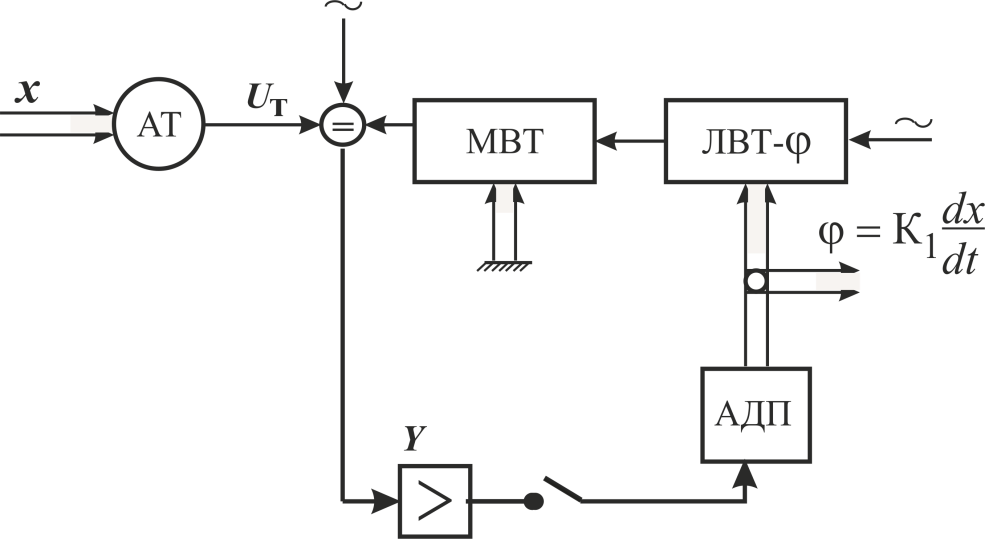
Рис. 3.10. Схема дифференцирования с использованием ВТ
Величинах, подлежащая дифференцированию, поступает в форме угла поворота на вращение ротора асинхронного тахогенератора. Так как выходное напряжение тахогенератора  пропорционально скорости вращения его ротора
пропорционально скорости вращения его ротора  то
то
 (3.14)
(3.14)
Выходное напряжение тахогенератора и будет представлять производную входной величины по времени в масштабе m1.
При необходимости иметь производную  в форме угла поворота вала используют расшифровывающую следящую систему, состоящую из усилителя У, исполнительного двигателя АДП, ЛВТ и МВТ. В этом случае угол поворота исполнительного двигателя следящей системы j будет представлять производную величины х.
в форме угла поворота вала используют расшифровывающую следящую систему, состоящую из усилителя У, исполнительного двигателя АДП, ЛВТ и МВТ. В этом случае угол поворота исполнительного двигателя следящей системы j будет представлять производную величины х.
Операция интегрирования в схемах на ВТ выполняется с помощью интегрирующего привода.
Интегрирующий привод (рис. 3.11) состоит из следующих основных элементов: линейного вращающегося трансформатора ЛВТ, задающего подынтегральную функцию  ; усилителя У; двигателя АДП; асинхронного тахометра AT; масштабирующего элемента МВТ.
; усилителя У; двигателя АДП; асинхронного тахометра AT; масштабирующего элемента МВТ.
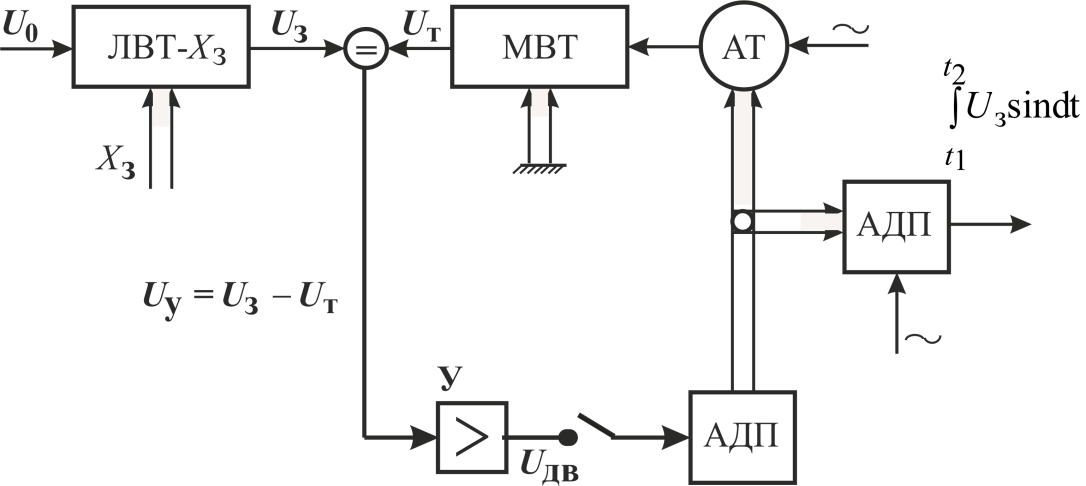
Интегрируемая величина с выхода счетно-решающего каскада в виде напряжения  подается на сравнение с напряжением асинхронного тахометра
подается на сравнение с напряжением асинхронного тахометра  . Разность напряжений
. Разность напряжений  поступает на вход усилителя У. С выхода усилителя напряжение подается на обмотку управления электродвигателя, который вращает жестко связанный с ним вал AT.
поступает на вход усилителя У. С выхода усилителя напряжение подается на обмотку управления электродвигателя, который вращает жестко связанный с ним вал AT.
Если при неподвижном вале АДП на вход интегратора подать напряжение , то двигатель начнет разгон. При разгоне напряжение тахогенератора увеличивается и на вход усилителя поступает напряжение  . Разгон двигателя будет происходить до тех пор, пока не станет равным . В этом случае
. Разгон двигателя будет происходить до тех пор, пока не станет равным . В этом случае  становится равным нулю, прекращается подача напряжения с усилителя на АДП и он резко уменьшает число оборотов. Уменьшение числа оборотов АДП приводит к уменьшению напряжения . Уменьшение напряжения вызывает увеличение сигнала на входе усилителя , под действием которого АДП вновь увеличивает скорость вращения до момента выполнения условия
становится равным нулю, прекращается подача напряжения с усилителя на АДП и он резко уменьшает число оборотов. Уменьшение числа оборотов АДП приводит к уменьшению напряжения . Уменьшение напряжения вызывает увеличение сигнала на входе усилителя , под действием которого АДП вновь увеличивает скорость вращения до момента выполнения условия  .
.
Усилитель интегрирующего привода имеет большой коэффициент усиления, поэтому считают, что АДП вращается с такой скоростью, при которой практически обеспечено равенство  .
.
Покажем, что угол поворота двигателя в рассмотренной схеме пропорционален интегралу входной величины .
Напряжение на выходе усилителя  может быть записано в виде
может быть записано в виде
 ,
,
где  – коэффициент усиления усилителя.
– коэффициент усиления усилителя.
Вращающий момент на валу АДП пропорционален напряжению, приложенному к его управляющей обмотке:
 ,
,
где  – коэффициент пропорциональности.
– коэффициент пропорциональности.
В установившемся режиме вращающий момент, развиваемый двигателем, уравновешивается моментом нагрузки  и моментом трения двигателя
и моментом трения двигателя  :
:
 (3.15)
(3.15)
где w – угловая скорость вращения двигателя;
 – коэффициент пропорциональности.
– коэффициент пропорциональности.
Выражение (3.15) можно записать в виде
 .
.
Учитывая, что
 , а
, а 
получим

или
 . (3.16)
. (3.16)
Из выражения (3.16) следует, что

В интегрирующих приводах приборов управления усилители имеют большой коэффициент усиления  , поэтому
, поэтому
При этих условиях
Имея в виду, что  (j – угол поворота вала двигателя) можно записать
(j – угол поворота вала двигателя) можно записать
 ,
,
или
 (3.17)
(3.17)
где
Из выражения (3.17) видно, что угол поворота вала двигателя интегрирующего привода воспроизводит в некотором масштабе интеграл по времени задающего напряжения . Интегрирование производится с набегающей ошибкой D, которая зависит от параметров интегрирующего привода  , ,
, ,  и момента нагрузки
и момента нагрузки  .
.
Если задающее напряжение  будет изменяться во времени, то ошибки интегрирования возрастут за счет инерционностей усилителя, двигателя и нагрузки.
будет изменяться во времени, то ошибки интегрирования возрастут за счет инерционностей усилителя, двигателя и нагрузки.
Для правильной работы интегрирующего привода необходимо, чтобы напряжение, поступающее для интегрирования , совпадало по фазе с напряжением тахогенератора  и имело бы с ним один масштаб. Фазирование напряжений и
и имело бы с ним один масштаб. Фазирование напряжений и  производится с помощью фазосдвигающей цепочки
производится с помощью фазосдвигающей цепочки  , которая включается в линию задающего напряжения . Масштабирование напряжений и производится с помощью масштабных трансформаторов или потенциометров. Масштабные трансформаторы включаются непосредственно на выходе счетно-решающего каскада перед фазирующими элементами.
, которая включается в линию задающего напряжения . Масштабирование напряжений и производится с помощью масштабных трансформаторов или потенциометров. Масштабные трансформаторы включаются непосредственно на выходе счетно-решающего каскада перед фазирующими элементами.
Выбор основных параметров и элементов интегрирующего привода рассмотрим на примере.
Если вместо стандартного единичного напряжения на обмотку входную АТ подать масштабное напряжение  , то напряжение равно:
, то напряжение равно:
 ,
,
Учитывая, что  , то, при соблюдении баланса
, то, при соблюдении баланса  , нетрудно получить выражение:
, нетрудно получить выражение:
 .
.
Данная зависимость позволяет автоматизировать процесс интегрирования отношения двух переменных.
П р и м е р. Рассчитать интегрирующий привод (рис. 3.11) для определения составляющей пути своего корабля, вычисляемой по формуле
Исходные данные для расчета:
- максимальная скорость своего корабля Vс= 30уз =5 кбт/мин;
- время интегрирования t = 0-12 мин;
- максимальное значение составляющей IS= 5×12 = 60кбт;
- исполнительный двигатель АДП-1 с номинальной скоростью вращения n = 9000 об/мин;
- асинхронный тахометр АТ-231, nт = 4000 об/мин;
- крутизна выходного напряжения AT DE= 5  .
.
При расчете интегрирующего привода определяют выходное напряжение АТ-231  и рассчитывают элементы кинематических связей.
и рассчитывают элементы кинематических связей.
Максимальное выходное напряжение АТ-231 равно

Расчет элементов кинематики:
1. Передаточное отношение между АДП-1 и АТ-231:
2. Передаточное отношение между АДП-1 и выходным ЛВТ jлвт=60°, так как величина ISзнакопеременна;

3. Цена оборота ЛВТ:
4. Цена оборота АДП:

Контрольные вопросы
1. Что такое электрический масштаб величины?
2. Что такое механический масштаб величины?
3. Что такое «цена оборота вала»?
4. Каково назначение расшифровывающей следящей системы?
5. Какие способы алгебраического суммирования электрических сигналов Вы знаете?
6. Приведите схему алгебраического суммирования электрических сигналов с использованием ВТ.
7. Приведите схему умножения электрических сигналов с использованием ВТ.
8. Приведите примеры тригонометрических преобразований с использованием ВТ.
9. Приведите схему интегрирования с использованием ВТ.
10.Приведите схему дифференцирования с использованием ВТ.
Дата: 2018-12-21, просмотров: 506.