Решающие следящие системы (РСС) предназначены для моделирования довольно большого количества функций: сложения, вычитания, умножения, деления, осреднения и т. д. Но во всех вариантах построения схем РСС принцип их работы одинаков и заключается в том, чтобы свести к нулю сигнал, снимаемый с синусной обмотки ВТ-приемника и подаваемый на усилитель следящей системы и, следовательно, на управляющую обмотку исполнительного элемент следящей системы – АДП, который и реализует выполнение этой задачи.
В морских средствах навигации (МСН) РСС используются для выработки навигационной информации на основе данных, поступающих от нескольких источников. Данная система используется в гирокомпасах для выработки скоростной поправки, угла разведения гиромоторов на основе данных, поступающих от лага и системы автоматического счисления. В системах автоматического счисления навигационных комплексов РСС используются для выработки угловых скоростей изменения широты и долготы, для выработки путевого угла и осреднения навигационной информации.
Приведем ряд схем, моделирующих реализацию различных математических преобразований с использованием рассмотренных выше электромеханических элементов систем автоматики.
Функция осреднения.
Структурно-функциональная схема, РСС, предназначенная для выработки среднего значения случайной функции времени, представлена на рис. 3.20.
РСС состоит из трех вращающихся трансформаторов (ВТ1, ВТ2, ВТ3), усилителя и исполнительного элемента - двигателя АДТ. Датчиками исходной информации (ВТ1 и ВТ2) являются СКВТ, работающие в режиме координатора, приемником информации, вырабатываемой задающей частью РСС, является СКВТ ВТ3, работающий в режиме построителя (ПВТ). На обмотку возбуждения BT1 и ВТ2 подается напряжение возбуждения  , роторы – BT1 и ВТ2 развернуты на углы
, роторы – BT1 и ВТ2 развернуты на углы  , и
, и  соответственно. Синусная обмотка ВТ1 соединена последовательно с синусной обмоткой ВТ2, косинусная обмотка BT1 соединена последовательно с косинусной обмоткой ВТ2.
соответственно. Синусная обмотка ВТ1 соединена последовательно с синусной обмоткой ВТ2, косинусная обмотка BT1 соединена последовательно с косинусной обмоткой ВТ2.
Напряжения на роторных обмотках BT1 равны:
 (3.25)
(3.25)
Напряжения на роторных обмотках ВТ2 равны:
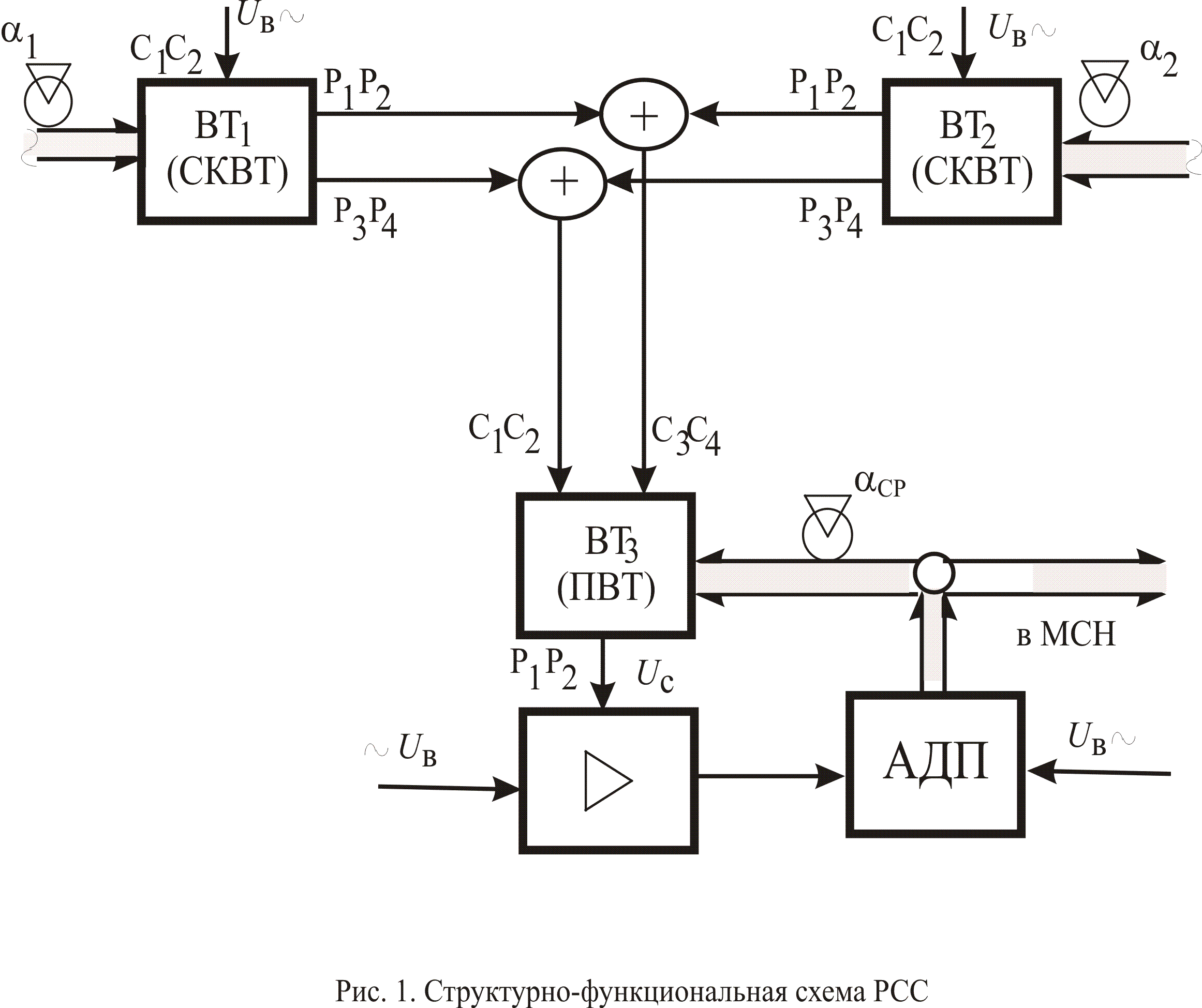
Рис. 3.20. Структурно-функциональная схема осреднения двух параметров
 (3.26)
(3.26)
Следовательно, на квадратурную обмотку и обмотку возбуждения построителя поступают следующие напряжения:
 (3.27)
(3.27)
Токи, протекающие по этим обмоткам, создают два ортогональных магнитных потока  и
и  , которые в синусной обмотке СКВТ-приемника индуктируют (рис. 3.16) напряжение
, которые в синусной обмотке СКВТ-приемника индуктируют (рис. 3.16) напряжение
 (3.28)
(3.28)
где β - текущий угол разворота ротора СКВТ-приемника.
Это напряжение при любых значениях угла разворота роторов СКВТ-датчиков в любой момент времени пропорционально углу рассогласования ротора СКВТ-приемника с углом, которому соответствует напряжение, выработанное задающей частью РСС и подаваемое на входы СКВТ-приемника.
Задача РСС заключается в сведении этого напряжения к нулю, что является условием синхронизации следящей системы (синхронизации работы приемной (отрабатывающей) и задающей частей РСС).
Схема, представленная на рис. 3.20, должна синхронизироваться при условии, что угол разворота ротора СКВТ-приемника равняется полусумме углов разворота роторов датчиков. Проверим это.
Если выражение  равно нулю (условие синхронизации РСС), то справедлива следующая его запись
равно нулю (условие синхронизации РСС), то справедлива следующая его запись
 .
.
Разделив (с учетом формулы (3.27) обе части формулы на  получим
получим
Применив теорему сложения тригонометрических функций, получим

Или, проведя сокращение на 2, получим
 ,
,
откуда
 ,
,
т.е. 
Таким образом, решающая следящая система, реализованная по схеме, представленной на рис. 3.20, действительно обеспечивает поворот ротора СКВТ-приемника на угол, равный полусумме углов поворота роторов СКВТ-датчиков.
Функция разности.
Схема моделирования на аналоговых счетно-решающих устройствах функции алгебраической разности двух навигационных параметров (НП) представлена на рис. 3.21.
 При развороте ротора СКВТ1, работающего в режиме координатора, на угол α, пропорциональный величине первого заданного НП, и подаче на его обмотку возбуждения напряжения ~U0 с роторных (синусной и косинусной) обмоток СКВТ1 будут сниматься напряжения:
При развороте ротора СКВТ1, работающего в режиме координатора, на угол α, пропорциональный величине первого заданного НП, и подаче на его обмотку возбуждения напряжения ~U0 с роторных (синусной и косинусной) обмоток СКВТ1 будут сниматься напряжения:
 (3.29)
(3.29)
которые подаются на статорные обмотки СКВТ2 таким образом, чтобы напряжение  поступало на квадратурную обмотку С3С4, а напряжение
поступало на квадратурную обмотку С3С4, а напряжение  на обмотку возбуждения С1С2. При развороте ротора СКВТ2, работающего в режиме построителя, на угол β, пропорциональный величине второго заданного НП, с его роторных обмоток будут сниматься напряжения:
на обмотку возбуждения С1С2. При развороте ротора СКВТ2, работающего в режиме построителя, на угол β, пропорциональный величине второго заданного НП, с его роторных обмоток будут сниматься напряжения:

 =
=
 ;
;
 +
+ 

 ,
,
где  коэффициент пропорциональности;
коэффициент пропорциональности;
 коэффициент трансформации СКВТ1;
коэффициент трансформации СКВТ1;
 коэффициент трансформации СКВТ2.
коэффициент трансформации СКВТ2.
Рис. 3.21. Функциональная схема РСС, моделирующая выработку
Разности
Напряжения  и
и  поступают (соединение обмоток встречное) на квадратурную обмотку и обмотку возбуждения СКВТ-приемника РСС (СКВТ3), напряжение с синусной обмотки которого подается (после усиления) на обмотку управления исполнительного элемента следящей системы – двигателя АДП. Вал двигателя, приводя ротор СКВТ-приемника в согласованное положение, будет вращаться до тех пор, пока напряжение на его обмотке управления, т. е. на синусной обмотке СКВТ-приемника не станет равным нулю (пока угол рассогласования ротора приемника с углом, который моделируется поступающими на вход СКВТ-приемника напряжениями, не станет равным нулю).
поступают (соединение обмоток встречное) на квадратурную обмотку и обмотку возбуждения СКВТ-приемника РСС (СКВТ3), напряжение с синусной обмотки которого подается (после усиления) на обмотку управления исполнительного элемента следящей системы – двигателя АДП. Вал двигателя, приводя ротор СКВТ-приемника в согласованное положение, будет вращаться до тех пор, пока напряжение на его обмотке управления, т. е. на синусной обмотке СКВТ-приемника не станет равным нулю (пока угол рассогласования ротора приемника с углом, который моделируется поступающими на вход СКВТ-приемника напряжениями, не станет равным нулю).
Проверим, на какой угол в нашем случае развернется ротор СКВТ-приемника, для чего приравняем нулю напряжение синусной обмотки СКВТ-приемника, пропорциональное углу рассогласования ротора СКВТ-приемника по отношению к положению роторов СКВТ-датчиков. Итак:
 =
=  =
=

Запишем это выражение в виде

После сокращения имеем

Разделив обе части на  , получим
, получим

или 
откуда  .
.
Таким образом, решающая следящая система, реализованная по схеме, представленной на рис. 3.21, действительно обеспечивает поворот ротора СКВТ-приемника на угол, равный разности углов поворота роторов СКВТ-датчиков.
Функция сложения
Для моделирования операции алгебраического сложения двух НП может быть использована схема, аналогичная схеме, представленной на рис. 3.21. Отличие лишь в том, что синусная Р1Р2 обмотка СКВТ1 и квадратурная С3С4 обмотка СКВТ2 должны быть включены не встречно, а последовательно, что позволит получить ѱ  β + α.
β + α.
Функция деления
Для моделирования в аналоговых системах математической операции деления с переменными величинами делимого и делителя применяется РСС, функциональная схема которой приведена на рис. 3.22.
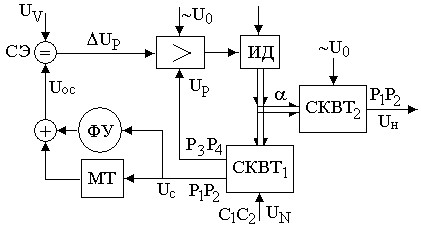
Рис. 3.22. Функциональная схема РСС деления
Роль делимого выполняет электрической сигнал UV, поступающий на СЭ, который
обычно расположен в одном из блоков усилителя следящей системы. В качестве делителя используется электрический сигнал UN, поступающий на обмотку С1С2 СКВТ1, ротор которого развернут в начальный момент на произвольный угол α. В соответствии с принципом работы ВТ с  синусной обмотки Р1Р2 СКВТ1 будет сниматься напряжение
синусной обмотки Р1Р2 СКВТ1 будет сниматься напряжение
=  ,
, 
которое, с помощью масштабного трансформатора (МТ) и фазирующего устройства (ФУ), преобразуется в сигнал обратной связи UOC. С помощью МТ и ФУ согласовываются масштабы сравниваемых в СЭ напряжений (UV и UOC) и их фазы.
Таким образом, напряжение обратной связи определяется 
 выражением
выражением
UOC= kU s,
где k – коэффициент пропорциональности.
Т. к. в общем случае Uv ≠ Us, то в СЭ образуется сигнал рассогласования
∆Up= UV  Uoc = UV kkт1UN
Uoc = UV kkт1UN  , (3.30)
, (3.30)
который, после усиления, поступает на обмотку управления 
 исполнительного двигателя следящей системы ИД. Исполнительный двигатель начинает разворачивать роторы СКВТ1 и СКВТ2 (выходной элемент следящей системы) таким образом, чтобы сигнал ∆Up, поступающий на обмотку возбуждения ИД сигнал уменьшался. Это приведет к изменению напряжения U S синусной обмотки СКВТ1, уменьшение напряжения Uoc и, естественно, уменьшение напряжения ∆Up. При выполнении условия ∆Up = 0 двигатель остановится, т. е. роторы СКВТ1 и СКВТ2 будут развернуты на угол, значение которого можно определить, приравняв нулю выражение (3.30):
исполнительного двигателя следящей системы ИД. Исполнительный двигатель начинает разворачивать роторы СКВТ1 и СКВТ2 (выходной элемент следящей системы) таким образом, чтобы сигнал ∆Up, поступающий на обмотку возбуждения ИД сигнал уменьшался. Это приведет к изменению напряжения U S синусной обмотки СКВТ1, уменьшение напряжения Uoc и, естественно, уменьшение напряжения ∆Up. При выполнении условия ∆Up = 0 двигатель остановится, т. е. роторы СКВТ1 и СКВТ2 будут развернуты на угол, значение которого можно определить, приравняв нулю выражение (3.30):
UV  kkт1UN = 0,
kkт1UN = 0,
или
UV  kkт1UN
kkт1UN 
откуда 
Тогда значение искомого угла разворота вала ИД (при его останове α = α0) равно:
 .
.
Поскольку в момент остановки ИД ротор СКВТ2 также будет развернут на угол α0,, то с его синусной обмотки будет сниматься напряжение , определяемое выражением:
 .
.
Так как

то, при условии, что  (достигается с помощью МТ), получим
(достигается с помощью МТ), получим
Таким образом, представленная на рис. 3.22 схема РСС действительно может моделировать математическую операцию деления.
Напряжение, снимаемое с косинусной обмотки СКВТ1, используется для автоматического регулирования коэффициента усиления сигнала рассогласования ∆Up. В рассматриваемой схеме это напряжение при увеличении напряжения UN уменьшает коэффициент усиления усилителя, что обеспечивает устойчивую работу РСС.
Дата: 2018-12-21, просмотров: 491.