Асинхронный двигатель - это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство
На рисунке: 1 - вал, 2,6 - подшипники, 3,8 - подшипниковые щиты, 4 - лапы, 5 - кожух вентилятора, 7 - крыльчатка вентилятора, 9 - короткозамкнутый ротор, 10 - статор, 11 - коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
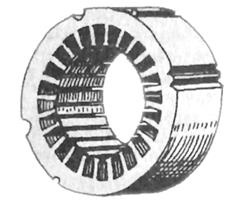


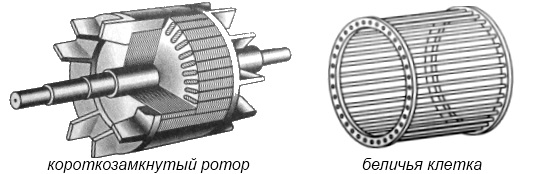
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется "беличьей клеткой". В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.

Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся. Частота вращения этого потока прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
 ,
,
Результирующий магнитный поток статора вращается вокруг ротора и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, направление движения которого определяется по правилу правой руки. Этот ток в свою очередь взаимодействует с магнитным потоком статора, в результате чего возникает сила Ампера, направление которой определяется по правилу левой руки. Под действием силы Ампера начинается вращение ротора в направлении вращения магнитного поля статора. При этом возникает так называемое скольжение.
Скольжение s - это величина, которая показывает, насколько частота n1 вращения магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении. 
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента.
Принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе.
Асинхронный тяговый двигатель так же является обратимым, то есть в тормозном режиме работает как генератор и преобразует механическую энергию вращения колесной пары в электрическую энергия.
Для перевода двигателя в режим генерации электроэнергии к обмоткам статора подключаются три одинаковых конденсатора.
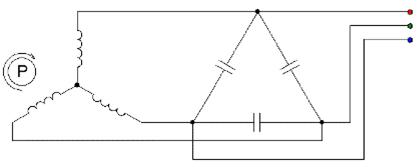
Поскольку на роторе присутствует остаточная намагниченность, то при его вращении в статорных обмотках возникнет ЭДС индукции, а поскольку к обмоткам подключены конденсаторы, будет иметь место соответствующий емкостный ток, который станет намагничивать ротор. При дальнейшем вращении ротора произойдет самовозбуждение, благодаря чему в обмотках статора установится трехфазный синусоидальный ток, а на валу ротора возникнет тормозной момент.
Способы изменения скорости и направления вращения якоря (ротора).
Для увеличения скорости вращения якоря в тяговых машинах постоянного тока необходимо увеличить силу тока. Из закона Ома понятно, что для увеличения силы тока нужно либо уменьшить сопротивление, либо увеличить напряжение.
I=U/R,
где I – сила тока,
U – напряжение,
R – сопротивление.
Изменение величины сопротивления производится с помощью реостатного контроллера. Так как напряжение контактной сети постоянно, то изменение напряжения можно производить с помощью переключения групп тяговых двигателей с последовательного соединения на параллельное.
При большой скорости вращения якоря в магнитном поле на его обмотках образуется противо-ЭДС, что приводит к уменьшению тока якоря, а следовательно и к уменьшению скорости его вращения. Для уменьшения противо-ЭДС необходимо уменьшить магнитный поток Ф полюсов двигателя. Для этого часть тока отводится от обмоток возбуждения по шунтирующей цепи и магнитное поле тяговых двигателей ослабляется.
Для изменения направления вращения якоря двигателя постоянного тока необходимо изменить направление движения тока в обмотках возбуждения или в обмотках якора. Тогда направление силы Ампера, определяемое по правилу левой руки, так же изменится на противоположное.
Наиболее распространенные способы регулирования скорости вращения ротора асинхронного двигателя: изменение напряжения, подводимого к обмотке статора, изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Частота вращения ротора, выраженная через скольжение, определяется формулой:

Отсюда видно, что для увеличения частоты вращения ротора n 2 нужно увеличить частоту вращения магнитного поля n 1. Для увеличения частоты вращения поля нужно изменить частоту питающего напряжения на полюсах статора.
Направление вращения ротора асинхронного двигателя определяется направлением вращения его магнитного поля, а направление вращения магнитного поля обуславливается последовательностью фаз (А, В, С) трехфазной сети. Для изменения направления вращения двигателя достаточно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка поступления импульсов тока в отдельные обмотки.
Тяговый двигатель
Тяговый электродвигатель переменного тока - трехфазный, асинхронный с короткозамкнутым ротором, четырехполюсный с инверторным управлением (переменное напряжение и частота) предназначен для преобразования в тяговом режиме потребляемой из контактной сети электрической энергии в механическую энергию вращения ротора для обеспечения вращения колесных пар вагона и обратного преобразования в режимах реостатного и рекуперативного торможения вагона механической энергии в электрическую.
Электродвигатель относится к классу самовентилируемых, имеет вентилятор, устанавливаемый на валу ротора на стороне противоположной выходному валу.
Ротор.
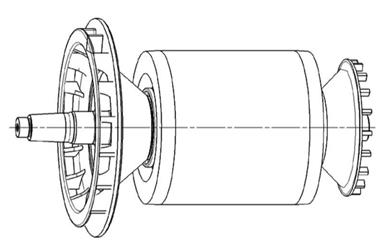
В качестве подшипников применяется компактная подшипниковая система компании Hitachi, позволившая увеличить интервал времени между проведением текущего ремонта.
Поскольку управление двигателем осуществляется при помощи оборудова-ния инверторного управления VVVF, имеется возможность контроля вибрации и температуры.
Контроль частоты вращения двигателя обеспечивает датчик скорости, кото-рый установлен на боковой поверхности двигателя (противоположной ведущей шестерни).
Двигатель состоит из статора и ротора.
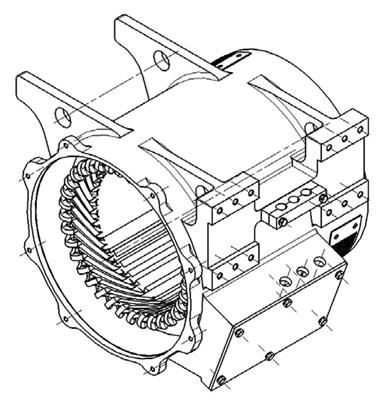
Статор.
Корпус статора представляет собой механическую конструкцию с элементами крепления двигателя на тележке. В статоре намотана трехфазная обмотка с вакуумной пропиткой лаком, в которой использован изоляционный материал.
Ротор выполнен в виде короткозамкнутой обмотки. Стержни обмотки ротора изготовлены из медно-цинкового сплава. Вал двигателя выполнен из хромиро-ванной молибденовой стали.
| № | характеристика | ДК-108 | ДК-117 |
| 1 | Номинальное напряжение в тяговом режиме, В | 375 | 375 |
| 2 | Номинальное напряжение в генераторном режиме, В | 750 | 750 |
| 3 | Номинальная мощность, Вт | 66 | 110 |
| 4 | Расчетное ослабление поля, % | 35 | 28 |
| 5 | Используемое ослабление поля, % | 55 | 50 |
| 6 | Ток часового режима, А | 202 | 330 |
| 7 | Тип обмотки якоря | волновая | петлевая |
| 8 | Воздушный зазор между полюсом и якорем, мм | 3,25 | 2,5 |
| 9 | Масса, кг | 630 | 700 |
| 10 | Суммарная величина сопротивления обмоток при температуре 200 С, Ом | 0,13 | 0,07 |
АТП Параметры:
| Режим | Часовой |
| Мощность (кВт) | 170 |
| Напряжение (В) | 530 |
| Скорость вращения (об/мин) | 1269 |
| Частота (Гц) | 43 |
| Скольжение (%) | 1.6 |
| Максимальная рабочая частота | 3766 |
| вращения (об/мин) | |
| Максимально допустимый ток (А) | 321 |
| Вес (кг) | 720 |
Асинхронный тяговый двигатель в сравнении с двигателем постоянного тока имеет большую мощность при том же весе. Кроме того конструкция асинхронного двигателя проще и надежней. Преимуществом асинхронного двигателя перед коллекторным является отсутствие коллекторно-щеточного узла.
Недостатком асинхронного двигателя при эксплуатации в метрополитене является необходимость установки дополнительного оборудования (инверторов) для преобразования постоянного тока в переменный.
Лекция 2
Токоприемники рельсовые
Токоприемник рельсовый предназначен для нижнего токосъема с контактного рельса при любых скоростях и любых атмосферных условиях.
Контактная пластина токоприемника скользит по нижней поверхности контактного рельса, обеспечивая надежный токосъем.
Токоприемник рельсовый ТР–3
Общий вид токоприемника представлен на рис.1
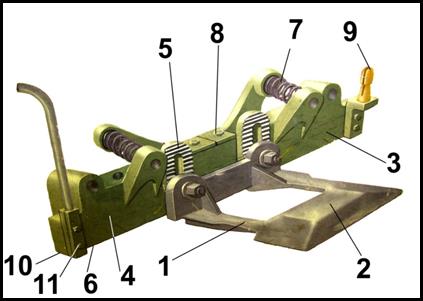
Рис.1 Токоприемник ТР-3
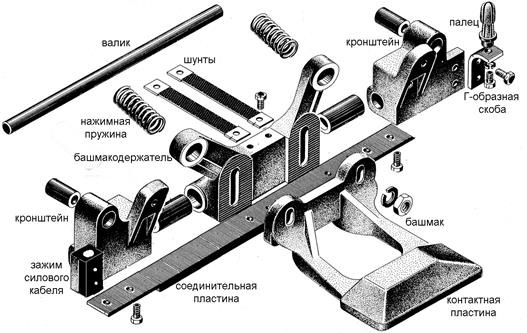
1- башмак; 2- контактная пластина; 3,4- левый и правый кронштейн; 5- башмакодержатель; 6- соединительная пластина; 7- две пружины; 8- два шунта; 9- палец для удочки; 10- валик ;11- узел крепления кабеля ТР
Токоприемник монтируется на деревянном брусе, который является изолятором. Брусья токоприемника крепятся болтами по два с каждой стороны вагона к приливам букс колесных пар. Всего на вагоне четыре токоприемника
Держатель башмака с левым и правым кронштейнами связан валиком. Поэтому держатель башмака может поворачиваться по валику.
Левый и правый кронштейны соединены друг с другом стальной соединительной пластиной, расположенной снизу. Поверхности соприкосновения держателя башмака с башмаком имеют гребенку для регулировки высоты подвески башмака над уровнем головки ходового рельса. В нижней части башмака имеются контрольные лунки для определения степени износа контактной пластины. Скосы контактной пластины обеспечивают плавность входа башмака ТР под контактный рельс.
В верхней части держателя башмака имеются приливы с гнездами для установки в них пружин, каждая из которых другим концом упирается в гнезда левого и правого кронштейна. Пружины токоприемника удерживают башмак в верхнем положении и создают необходимое контактное нажатие башмака на контактный рельс.
На правом кронштейне установлен контактный палец, на который надевается втулка подвижного кабеля электродепо «удочка», для подачи высокого напряжения на вагон в условиях депо. К левому кронштейну крепится силовой кабель ТР.
Держатель башмака соединен двумя гибкими медными шунтами с соединительной пластиной кронштейнов, чтобы ток не шел по осевому соединению.
Для отжатия башмака ТР от контактного рельса в левом кронштейне имеется отверстие, куда вставляется штырь, фиксирующий башмак в крайнем нижнем положении.
На новых вагонах установлен пневматический цилиндр для дистанционного отжатия башмаков.
Силовые кабели всех ТР соединены в соединительной коробке, поэтому при наличии напряжения хотя бы на одном токоприемнике, все остальные токоприемники вагона так же будут под напряжением.
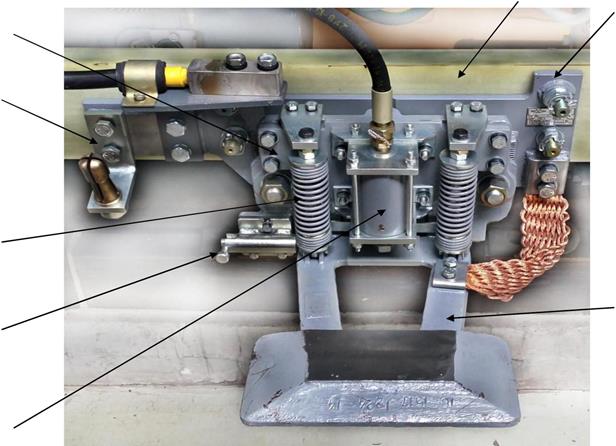
Токоприемник рельсовый ТР-7Б с пневматическим приводом
Основными деталями токоприемника ТР-7Б являются основание (2), рычаг с башмаком (3), кронштейн с вилкой (7), пневматический привод (4), пружины (6), механизм ручной фиксации башмака в отжатом положении (5).
Токосъем осуществляется контактной поверхностью башмака, который крепится к рычагу (3) при помощи четырех болтов.
Для подачи на токоприемник, в условиях депо, высокого напряжения с помощью подвижного кабеля в его конструкции предусмотрена контактная вилка, закрепленная на кронштейне (7) болтами.
Рычаг (3) шарнирно связан с кронштейном (8) на котором крепится пневматический привод (4). Кронштейн с приводом устанавливается па основании (2).
Основание и кронштейн имеют рифленые поверхности, обеспечивающие надежное фиксированное положение кронштейна относительно основания. Конструкция основания и кронштейна дают возможность перемещения последнего относительно основания на 30 мм. Рычаг и основание имеют электрическое соединение с помощью гибкого токопроводящего прово
 1 2
1 2
8
7
6
3
5
4
В рабочем положении прижатие башмака к контактному рельсу осуществляется при помощи двух пружин (6), сила натяжения которых регулируется, и увеличивается при закручивании регулировочных болтов.
Управление отжатием токоприемников дистанционное с пульта машиниста. Пневматический привод изолирован от токопроводящих частей токоприемника изолирующей прокладкой. Для подсоединения пневмопривода к воздушной магистрали пневмосистемы вагона в крышке цилиндра имеются отверстия.
При подаче сжатого воздуха из пневмомагистрали вагона в цилиндр привода токоприемника шток пневмопривода, перемещаясь вниз, отжимает башмак от контактного рельса. В отжатом положении токоприемник удерживается сжатым воздухом. Возвращение токоприемника в рабочее положение осуществляется путем выпуска воздуха из цилиндра.
Конструкция токоприемника обеспечивает также и ручную фиксацию башма-
ка в отжатом положении.
Дата: 2018-12-21, просмотров: 635.