Требования к техническим средствам автоматизации и механизации.
Требования к техническим средствам механизации и автоматизации выдвигаются в зависимости от задач, решаемых в процессе формирования-расформирования составов.
Надвиг и роспуск составов
Технологическая операция включает процедуры подготовки программы роспуска состава, надвига, управления маршрутами скатывания и вытормаживания отцепов. Автоматизированное управление надвигом и роспуском составов осуществляется с помощью локомотивов, оборудованных подсистемой типа горочной автоматической локомотивной сигнализации с радиоканалом связи (ГАЛС Р).
Источником информации для определения скоростного режима надвига и роспуска состава является натурный или сортировочный лист, поступающий из АСУ СС, с указанием номера, длины и веса состава, инвентарных номеров входящих в него вагонов, веса и особых признаков груза и разбивки вагонов по отцепам и маршрутам.
Рабочие места дежурного парка прибытия (ДСП), дежурного по горке (ДСПГ) и машинистов горочных локомотивов оборудуются АРМами, связанными цифровыми каналами передачи информации.
На рабочее место ДСПГ выводится информация об ожидаемом подходе, наличии поездов в ПП и их готовности к роспуску, местонахождении и параметрах движения надвигаемых и распускаемых составов, заполнении путей сортировочного парка.
Программа регулирования скорости надвига и роспуска состава содержит информацию для управления горочным локомотивом, показаниями горочного светофора, указателями количества вагонов; предусматривает возможность изменения с пульта управления горкой или пульта машиниста автоматически заданных скоростей надвига и роспуска в пределах допустимых значений.
Регулирование скорости надвига и роспуска состава включает следующие режимы работы горочного локомотива:
- предварительный надвиг — движение состава из ПП (или вытяжного тупика) до горба горки при закрытом горочном светофоре;
- основной надвиг — движение состава из ПП (или вытяжного тупика) до горба горки при открытом горочном светофоре;
- попутный надвиг — движение состава вслед распускаемому или по маневровым маршрутам с автоматическим переходом в основной надвиг после продвижки маршрутного задания до вершины горки;
- роспуск состава с горки;
- осаживание состава с горки назад в ПП.
На горочные локомотивы передается информация о режимах работы (надвиг и его разновидности, роспуск, осаживание), скорости движения локомотива в виде значений допустимой и расчетной скорости для управления и индикации, о сигнальных показаниях для локомотивного светофора, а также номере горочного светофора и расстоянии до него в блок-участках и метрах
Рабочее место составителя (расцепщика) оснащается тремя указателями: количество вагонов в отцепе, индикация их очередности в составе и результаты расцепа.
Скорость движения отцепов по СГ регулируется с помощью тормозных средств, именуемых замедлителями и группируемых в тормозные позиции.
Тормозные позиции спускной части СГ обеспечивают такой скоростной режим движения вагонов, при котором не допускаются их нагоны на разделительных стрелках и тормозных позициях. Этот режим движения называют интервальным.
Тормозные позиции на путях СП предназначены для осуществления прицельного регулирования скорости движения отцепов. Подобное прицельное торможение обеспечивает движение вагонов по сортировочным путям в заданную координату. При этом не допускается соударений вагонов, движущихся со скоростями, превышающими допустимую величину (5 км/ч).
Скорости движения отцепов при автоматическом управлении вагонными замедлителями, установленными на спускной части и на сортировочных путях, определяются с учетом динамики движения, весовой категории, длины и дальности пробега отцепов, а также значения уклона сортировочного пути, мощности впереди расположенного вагонного замедлителя, интервальной ситуации, складывающейся на спускной части сортировочной горки, места остановки на сортировочном пути впереди идущего отцепа и расчетной скорости соударения с ним, погодных условий.
Предусматривается возможность изменения с пульта управления автоматически заданных скоростей выхода отцепов из тормозных позиций.
Режим работы, диапазон скоростей выхода для каждой тормозной позиции устанавливается применительно к конкретным условиям плана и профиля горки в зависимости от числа тормозных позиций в маршруте и наличия вагоноосаживающих устройств в СП, если последние предусмотрены системой.
На рабочие места горочных операторов выводится информация о параметрах тормозимых отцепов и маршрутах их следования, заданных и текущих скоростях их движения по тормозным позициям, а также путям СП, заполнении этих путей, длине окон и фактических скоростях соударения.
При определении скоростных режимов движения отцепов должны учитываться особые признаки вагонов и грузов и исключаться столкновения из-за негабаритов.
Управление маршрутами движения свободно скатывающихся отцепов состоит в адресном направлении вагонов на соответствующий путь СП.
Автоматизированное управление маршрутами движения обеспечивает автоматический роспуск разрешенных к спуску с горки вагонов, включая длиннобазные, без участия человека.
Управление стрелочными переводами для сортировки отцепов по маршрутам движения реализуется автоматически или вручную. При автоматическом управлении стрелочными переводами предусматривается возможность индивидуального управления любым стрелочным переводом, а также отмена заданного и установка с пульта управления нового маршрута следования отцепа до его вступления на рельсовую цепь первого стрелочного перевода.
В системе предусмотрена возможность автоматической корректировки маршрутов в случае неправильного расцепа.
Автоматический контроль расформирования состава должен регистрировать отклонения от заданной программы роспуска состава.
При определении маршрутов движения отцепа система управления должна исключать удары из-за негабаритов.
Маршрутное задание отцепа при нагоне сохраняется и автоматически восстанавливается при разделении отцепов.
Система управления обеспечивает передачу в информационно-планирующий уровень сортировочной станции (ИПУ СС) информации о каждом прошедшем стрелочную зону горки вагоне, в том числе при накоплении их выше III тормозной позиции, и принимает из ИПУ СС сообщение о накоплении вагонов на путях СП.
Система управления осуществляет контроль за маневровыми перемещениями по спускной части горки с информированием ИПУ СС о перестановках через 0,1 с после ухода вагона (маневровой группы) за последнюю стрелку маршрута.
Система управления исключает автоматическое задание маршрутов на путь, занятый стоящими вагонами выше парковой тормозной позиции или последней стрелки.
Трансляция маршрутов отцепов реализуется путем контроля свободности/занятости стрелочного участка и количества прошедших по нему вагонов (осей). Установка стрелок по маршруту осуществляется на всю свободную длину маршрута или при его освобождении предыдущими отцепами. При управлении стрелочными приводами реализуется функция автовозврата при отсутствии контроля положения стрелки не более чем через 1,2 с после начала перевода. Восстановление управления после получения контроля ее перевода осуществляется в ручном режиме.
Формирование составов
Эта технологическая операция включает управление маневровой работой в горизонтальных парках (сортировочном и парке отправления) станции и мониторинг подвижных единиц на ее путях.
Маневровая работа выполняется локомотивами, оборудованными подсистемой (ГАЛС Р) или ее аналогами (МАЛС Р) с передачей информации по радиоканалу.
Рабочие места дежурных по станции, задающих маневровые маршруты, и машинистов маневровых локомотивов оборудуются АРМами, связанными цифровыми каналами передачи информации. На маневровые локомотивы сообщаются данные о маршрутном задании, показаниях попутных сигналов, допустимой и фактической скорости
движения локомотива, направлении его движения, текущем расстоянии до конца маршрута в блок-участках и метрах, позиции регулирования силовой и тормозной системы локомотива. Дежурному по станции передается информация о номерах работающих в зоне его контроля локомотивов, направлении их движения, допустимой и фактической скорости, координате местоположения и сигналах проверки контроля бдительности машиниста, а также о режиме движения (автоматическом, местного задания или ручном). Кроме того, рекомендуется давать информацию о составе маневровой группы.
Объектами мониторинга являются подвижные единицы и их перемещение по станции. Система мониторинга должна обеспечивать первоначальную идентификацию подвижной единицы.
Автоматический мониторинг осуществляется по всем подвижным единицам, перемещаемым с помощью маневровых или поездных локомотивов, в том числе при маневрах толчками.
Результаты мониторинга отображаются на мониторах АРМов ДСП по зонам управления и передаются в ИПУ СС по завершении каждого полурейса, а при маневрах толчками и при освобождении стрелки перед путем сортировочного парка — с задержкой не более 1 с.
Подготовка составов и отправление поездов
Процедуры выезда маневрового локомотива и заезда поездного локомотива под состав отображаются на мониторе АРМа дежурного по парку отправления с указанием номеров пути и локомотивов и регистрируются в электронном журнале с учетом времени выполнения операции.
Осуществляется логический контроль за процедурой закрепления состава с подачей звукового сигнала на АРМе ДСП и регистрацией в электронном журнале ситуаций, связанных с нарушением последовательности выполнения процедур технологических операций подготовки и отправления составов.
Информация о выполнении технологических операций и подготовке к отправлению составов передается системой автоматизированного управления в ИПУ СС.
Комплексная система автоматизированного управления, предназначенная для сортировочных станций сетевого и регионального значения, обеспечивает расформирование составов как с одного, так и с двух путей роспуска одновременно (параллельный роспуск), сохранность вагонов и грузов при движении составов и отцепов по всему маршруту следования независимо от технической специфики вагонного парка, кроме вагонов, не разрешенных к самостоятельному роспуску с горки (см. ПТЭ).
Система обеспечивает скорость роспуска от 0,8 до 2,5 м/с на СГ большой и средней мощности при одиночных вагонах и от 0,5 до 1,5 м/с на СГ с вероятностью неразделения отцепов на спускной части горки не более 0,002. Скорость соударения вагонов на сортировочном пути не должна превышать 1,5 м/с.
Вероятность обеспечения установленной скорости соударения (в пределах 0—1,5 м/с) должна быть не ниже 0,9.
Система автоматизации гарантирует степень заполнения сортировочного пути в пределах зоны действия автоматизации не менее, чем на 80 %. Предельное отклонение допустимой скорости соударения с вагонами на сортировочном пути не должно превышать 0,5 м/с.
В подсистемах управления предусматривается возможность парирования опасных отказов и возникающих опасных ситуаций, а также обмен информацией между собой, унификация функциональных узлов и наличие современной элементной базы.
При автоматическом управлении компрессорной станцией исключаются аварийные ситуации, обеспечивается поддержание давления в магистрали минимально необходимым количеством компрессорных установок, их равномерная наработка, документирование основных рабочих параметров компрессоров, контроль и регистрация расхода сжатого воздуха потребителями, контроль рабочих параметров компрессоров и их отключение при необходимости.
Надежность системы управления поддерживается резервированием ее основных узлов, а также применением специальных технических и программных средств автоматического контроля, охватывающих всю аппаратуру системы и программное обеспечение.
Требования к напольным устройствам
К напольному оборудованию средств механизации и автоматизации сортировочных станций относят устройства, размещаемые на путях, либо в непосредственной близости от них в пределах спускной части горки и парков сортировочной станции, обеспечивающих контроль за перемещением и управление движением транспортных единиц железнодорожного транспорта.
Напольные устройства классифицируются по следующим группам:
- устройства для контроля местонахождения подвижных единиц;
- устройства для измерения параметров подвижного состава;
- исполнительные устройства;
- вспомогательные технические средства.
Устройства контроля участка
Напольные устройства данного класса предназначены для решения задач обнаружения транспортных средств (вагона, отцепа, локомотива и т.п) в установленной по протяженности либо габаритам зоне контроля с высокой достоверностью, обеспечивая высокую надежность функционирования в любых погодных условиях, парирование опасных отказов, дистанционный контроль работоспособности.
Датчики ФЭУ
Фотоэлектрическое устройство (ФЭУ) (рис. 49) применяется как дополнение к рельсовым цепям для защиты стрелок от перевода под движущимися вагонами при потере поездного шунта и пропуске длиннобазных вагонов. Нахождение вагона на стрелочном изолированном участке фиксируется фотоэлектрическим устройством за счет уменьшения освещенности фоторезистора, размещенного в корпусе фотодатчика, в момент пересечения вагоном направленного луча света осветителя
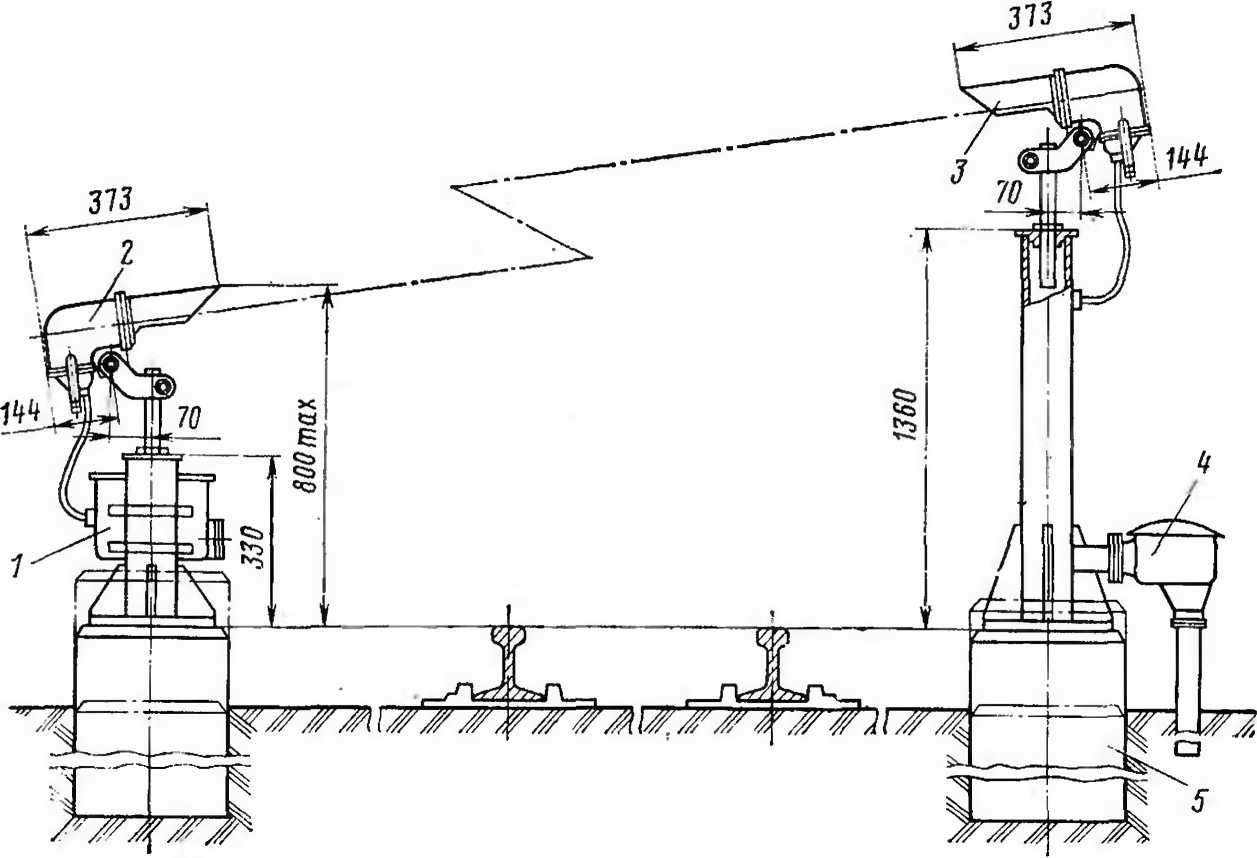
I — коробка трансформатора; 2 — осветитель; 3 — фотодатчнк; 4 — муфта У КМ-12; 5 — фундамент переездных светофоров
Комплект фотоэлектрического устройства:
Для защиты стрелок фотоэлектрическое устройство используется совместно с педалью ПБМ-56 или другими датчиками, применяемыми в горочных рельсовых цепях.
Фотоэлектрическое устройство состоит из осветителя с коробкой для питающего трансформатора, фотодатчика, релейной ячейки РЯ ФУ-72 и контрольного реле ФК типа НМШ2-4000. В комплект ФЭУ входят: осветитель, содержащий осветительную лампу 12В, 25В ЖС-12-25+25, питающий трансформатор СТ-6 или СОБС-2, линзу плоско-выпуклую диаметром 53 мм с фокусным расстоянием 80 мм; фотодатчик, содержащий фоторезистор ФСК-1 (ФР-765), линзу плоско-выпуклую диаметром 50 мм с фокусным расстоянием 80 мм; ячейка релейная РЯ-ФУ-72, содержащая реле фотодатчика Ф типа РП7 (PC4.521.004.nl), транзистор ПТ типа МП25, резисторы R 1 МЛТ-1-5,1 кОм, R 2 МЛТ-1-1,5 кОм, R 3 МЛТ-1-3,9 кОм, R 4 МЛТ-1-51 Ом, R 5 и R 6 МЛТ-1-12 кОм, фотоконтрольное реле ФК типа НМШ1-2000 (НМШ2-4000 или HP 1-2000).
Фотоэлектрическими устройствами оборудуют все головные и первые разделительные стрелки пучков сортировочной горки. Оборудование остальных стрелок возможно в каждом конкретном случае В зависимости от условий габарита..,
Осветитель и фото датчик располагаются в пути в соответствии с их схемами установки в профиле (рис. 50, а) и плане (рис. 50, б). Угол наклона оптической оси фотоэлектрического устройства к горизонту составляет 8°, что обеспечивает перекрытие луча основными типами подвижного состава по линии хребтовой балки.
При установке стоек осветителя и фотодатчика необходимо учитывать следующие основные размеры: минимальное расстояние от оси пути до оси стойки осветителя 2160 мм, фотодатчика 2690 мм; минимальное междупутье для установки осветителя 4375 мм, фотодатчика 5435 мм; максимально допустимое расстояние между осями стоек осветителя и фотодатчика 9000 мм. Удалять осветитель от оси пути более чем на 4500 мм не рекомендуется.
Высота установки фундаментов от уровня головки рельса (УГР) зависит от расстояния между осями стоек осветителя и фотодатчика.
Зависимость заглубления фундамента осветителя hi от расстояния от оси пути до центра стойки осветителя приведена ниже.
Для защиты фоторезистора от солнечных лучей, отраженных от боковых поверхностей вагонов, фотодатчик желательно устанавливать с максимально освещенной солнцем стороны пути, т. е. линза фотодатчика направляется в сторону солнечных лучей. В этом случае корпус вагона перекрывает лучи солнца и отраженных лучей не будет.
Фотоэлектрическое устройство регулируется для совмещения оптической оси осветителя с центральным отверстием диафрагмы фотодатчика. Перед началом оптической регулировки подаются соответствующие напряжения на осветительную лампу и фоторезистор. Затем головку осветителя ориентируют в сторону фотодатчика. При этом луч света осветителя должен проходить через точку А (см. рис. 50), расположенную на пересечении этого луча с вертикальной плоскостью, проведенной через точку А\. Точка А находится на вертикальной плоскости на высоте 1000+10 мм над уровнем головки рельса.
Луч света осветителя регулируют с помощью изготавливаемого на месте шаблона (щита с отметкой контрольной точки А), который устанавливают в колее на пути луча. Правильность регулировки луча осветителя подтверждается световым пятном на автосцепке при прохождении вагона мимо осветителя. После регулировки головку осветителя фиксируют крепежными гайками.
По окончании регулировки головки осветителя приступают к регулировке головки фотодатчика. Последовательно с фоторезистором (в разрыв цепи на зажиме кабельной муфты) включают миллиамперметр. Головку фотодатчика поворачивают таким образом, чтобы луч света осветителя попал на линзу фотодатчика. Наблюдая по прибору за световым током, медленно поворачивают головку фотодатчика для получения наибольшего светового тока.
Оптическую систему фотодатчика при необходимости регулируют: снимают ко-
зырек и ослабляют стопорный винт корпуса линзы, затем корпус линзы поворачивают по часовой или против часовой стрелки, одновременно наблюдая за показанием миллиамперметра. С получением наибольшего светового тока закрепляют стопорный винт корпуса линзы и козырек устанавливают на место.
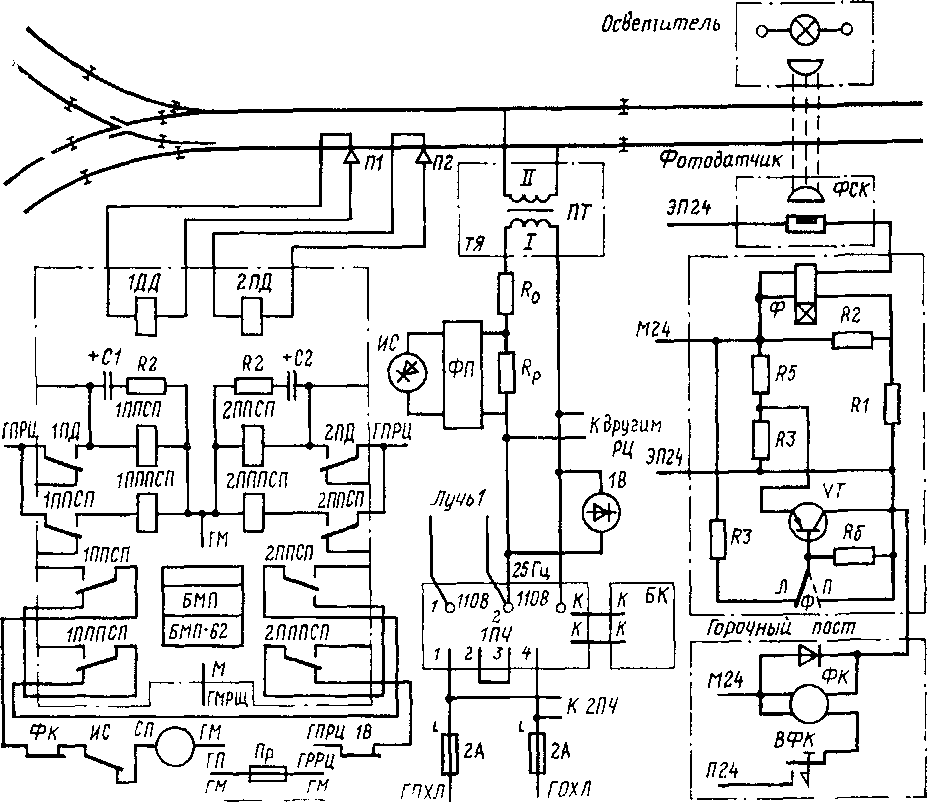
Фотоэлектрическое устройство начинает работать при освещении фотодатчика направленным лучом света осветителя, когда через фоторезистор и реле Ф (рис. 51) течет световой ток. Под действием этого тока реле Ф перебрасывает якорь и замыкает левый контакт Л. Через замкнувшийся контакт на базу транзистора VT подается отрицательное смещение, транзистор открывается и срабатывает фотоконтрольное реле Ф/С.
В момент перекрытия вагоном луча света осветителя значительно уменьшается освещенность фоторезистора, резко возрастает его сопротивление и уменьшается протекающий в цепи ток. Вследствие этого реле Ф перебрасывает якорь к правому П контакту и подает на базу транзистора VT положительное смещение. Транзистор закрывается и обесточивается реле ФК, фиксирующее фактическую занятость защищаемого путевого участка подвижным составом.
Контакты реле ФК включаются в схему замыкания стрелки последовательно с контактом путевого реле, что исключает перевод стрелки под отцепом при кратковременной потере шунта и пропуске длиннобазных вагонов. Кроме того, контакты реле ФК включаются в схему рельсовой цепи. В качестве основного варианта рекомендуется схема включения контакта реле ФК в схему блока ЕМГГ(рис. 52). На рис. 52 штриховой линией показано включение контакта СП при рельсовых цепях 50 Гц.
Фотоэлектрическое устройство воздействует на рельсовую цепь с ее занятием или проследованием ската отцепа над педалью, после чего рельсовая цепь блокируется до полного проследования отцепом зоны действия фотоэлектрического устройства Опыт эксплуатации фотоэлектрических устройств показал, что в отдельных случаях они прекращают работать из-за неблагоприятных метеорологических условий. Для обеспечения в этом случае роспуска составов на горочном и отдельном пультах размещают пломбируемые кнопки ВФК с фиксацией для выключения фотоэлектрических устройств (см. рис. 51). Такие кнопки устанавливают на фотоэлектрическое устройство каждой разделительной стрелки пучков и по одной кнопке на группу фотоэлектрических устройств пучка.
Для выключения фотоэлектрических устройств из зависимости используется При запотевании или индезении защитных стекол фотодатчиков в пространство между козырьком и линзой рекомендуется насыпать несколько гранул силикагеля — вещества, поглощающего влагу.
Для комплексной защиты стрелок ГАЦ применяют блок ЗС-75, в котором совмещены функции, выполняемые релейной ячейкой РЯ-ФУ-72, блоком медленнодействующих повторителей БМП-62 и фотоконтрольным реле ФК•
Конструкция блока разработана на базе конструкции блоков ГАЦ (рис. 53).
На шасси блока расположены педальные реле 1ПД и 2ПД, повторитель педальных реле ПД, реле фотодатчика Ф, фотокоитрольное реле ФК.
На печатной пла'ге расположены элементы схем включения реле ФК (диод VD1, транзистор VT1 и резисторы R1— R6) и реле ПД (диод VD2, транзисторы VT2 и VT3, конденсаторы С1—С4 и резисторы R7—R13).
Блок кабелем связан с фотодатчиком н путевыми педалями.
Блок рассчитан на питание иостоян ным током напряжением (24±2,4 В), В исходном состоянии (см. рис. 53) реле 1ПД, 2Г1Д к ПД находятся без тока; реле Ф и ФК—под током; транзисторы VT1, VT3 открыты; транзистор VT2 закрыт; конденсаторы С1—С4 заряженыОт воздействия ската подвижного состава на путевую педаль срабатывает педальное реле 1ПД(2ПД). После переброса якоря реле 1ПД(2ПД) к левому контакту на базу транзистора VT2 подается отрицательный потенциал, транзистор открывается. В результате открытия транзистора VT2 конденсаторы СЗ и С4 разряжаются через открытый транзистор VT2, источник питания и резисторы Rlt и R13. При этом потенциал на базе транзистора VT3 относительно эмиттера повышается и вызывает его закрытие.
Продолжительность открытого состояния транзистора VT2 определяется временем разряда конденсаторов СЗ и С4. Временные параметры конденсаторов СЗ, С4 и резистора R11 подобраны так, чтобы реле ПД успело надежно сработать.
После разряда конденсаторов СЗ и С4 транзистор VT2 закрывается, а реле ПД остается под током за счет разряда конденсаторов С/ и С2. Реле ПД совместно с конденсаторами С1 и С2 обеспечивает суммарное замедление 1,8 с, достаточное для освобождения опасных зон стрелочных путевых участков.
При перекрытии вагоном луча света осветителя резко уменьшается ток в цепи фотодатчика и реле Ф (обмотка 1— 2), вследствие чего реле перебрасывает якорь. Надежному перебросу якоря реле способствует встречно включенное напряжение на обмотку 3—4. После переброса якоря реле Ф к правому контакту на базу транзистора VT1 подключается положительный полюс батареи (IU2/20). Транзистор закрывается, фо- токонтрольное реле ФК обесточивается. При использовании для защиты стре- Аппаратура, размещаемая в блоке лок блока 3075 блок БМП-62 и ячейку ЗС-75, приведена в табл. 21. РЯ-ФУ-72 не устанавливают*
2.2.4 Датчики РТД-С
2.2.5 Датчик индуктивно проводной ИПД
2.2.6 Схемы размещения датчиков на поле.
2.2.7 Схема управления стрелкой с блоком СГ-66
2.2.8 Схема управления стрелкой с блоком СГ-76
2.2.9 Схема управления стрелкой с блоком СГ-74
2.2.10 Горочная светофорная сигнализация ( входные светофоры и их повторители.)
2.2.11 Классификация вагонных замедлителей
2.2.12 Конструкции замедлителей типа М-50
2.2.13 Конструкции замедлителей типа КНП.
2.2.14 Конструкции замедлителей типа КВ, ЦНИИ
2.2.15 Схема управления замедлителем
2.2.16 Измерение скорости движения отцепов на сортировочной горке.
2.2.17 Назначение и принцип работы Вессмеров , Тензометрический весомер.
2.2.18 Устройства электропитания.
Раздел 2 ПМ01 Построение и эксплуатация систем автоматиэации и механизации на сортировочных станциях.
2.1 Эксплуатационно технические требования к техническим средствам механизации на сортировочных станциях
1 Основные элементы сортировочной горки
2Технология работы по переработке вагонов на сортировочных станциях
3 Требования к техническим средствам автоматизации и механизации.
2.2 Устройства механизации и автоматизации сортировочных станций.
1 Работа схемы горочной рельсовой цепи 50 Гц.
Для исключения перевода стрелок под отцепами и слежения за их продвижением но маршрутам роспуска в распределительной зоне устраивают короткие стрелочные и межстрелочные рельсовые цепи. К горочным рельсовым цепям предъявляют повышенные требования надежности и устойчивости работы.
Рельсовая цепь должна надежно фиксировать занятость путевого участка при нахождении на нем даже одной колесной пары отцепа. Устойчивость работы рельсовой цепи должна обеспечиваться при всех неблагоприятных факторах; загрязнения головок рельсов токоне- нроводящими пленками, что повышает переходное сопротивление до 0,5 Ом и выше и приводит к кратковременной потере шунта; понижения сопротивления изоляции балласта до 30 м на длине 12,5 м из-за загрязнения солями, рудой и т. д.
Схема нормально разомкнутой рельсовой цепи переменного тока
50 Гц. Рельсовая цепь дополнена двумя магнитными педалями. Педаль П1 установлена от остряков стрелки на расстоянии 4 м, педаль 112— на расстоянии 5,5—6 м (рис. 10.21, а).
Рельсовая цепь имеет путевое реле С#(НВШ1-800 или НВШ1-1100), включенное по схеме однополупериодного выпрямления. Рельсовая цепь получает питание от путевого трансформатора ПТ (ПТМ-А). Последовательно в цепь первичной обмотки трансформатора ПТ включены резисторы R1 и R2 сопротивлением по 400 Ом на ток 0,2 А, а параллельно R1 — стрелочное путевое реле СП. В схеме включено реле контроля напряжения В (АСШ2-110), которое нормально возбуждено и обесточивается при пропадании или снижении напряжения в луче питания ниже напряжения надежного притяжения якоря путевого реле при шунтировании рельсовой цепи. При выключении реле В исключается возможность перевода стрелки.
Вступление ската отцепа на рельсовую цепь приводит к возрастанию тока в обмотках трансформатора ПТ. Возросший ток первичной обмотки создает на резисторах R1 и R2 падение напряжения, достаточное для срабатывания реле СП. Притягивая якорь, это реле фиксирует занятость рельсовой цепи и исключает перевод стрелки под отцепом. Резистор R2 включен для ограничения тока в обмотках ПТ при малых сопротивлениях поездного шунта. В случае прохождения отцепа с высоким сопротивлением поездного шунта реле СП из-за недостаточного тока трансформатора ПТ может не сработать, и стрелка будет переводиться под отцепом. Такую опасность исключают дополнительной фиксацией вступления отцепа на рельсовую цепь педалями П1 и /72.
2. Работа схемы горочной рельсовой цепи 25 Гц.
Рельсовая цепь (рис. 10.22) имеет: путевое реле ИС (ИМВШ-110), подключенное через путевой фильтр ФП (ФП-25) к резистору Rv; обратный повторитель путевого реле СП (НМШ1-800), находящийся подтоком при свободном состоянии рельсовой цепи; путевой трансформатор ПТ (ПТМ-А или ПТМ); преобразователь частоты ПЧ50/25-150: реле контроля напряжения 1В (АСШ-2-110).
В цепи реле СП контролируется: свободное состояние рельсовой цепи (тыловой контакт реле ИС); выключенное состояние повторителей педальных реле; возбужденное состояние реле 1В, чем определяется наличие переменного тока в луче /; возбужденное состояние фотоконтрольного реле ФК.
Рельсовая цепь частотой 25 Гц обеспечивает: надежное срабатывание реле ИС при наложении нормативного шунта (0,5 Ом), максимальном сопротивлении изоляции балласта и минимальном выходном напряжении преобразователя частоты 1ПЧ, равном 105 В; надежное отпускание якоря реле ИС в случае снятия нормативного шунта при минимальном сопротивлении изоляции балласта 3 Ом и максимальном выходном напряжении преобразователя 1Г1Ч, равном
Вступление ската отцепа на рельсовую цепь приводит к возрастанию тока в обмотках трансформатора ПТ. Возросший ток первичной обмотки создает на резисторах R1 и R2 падение напряжения, достаточное для срабатывания реле СП. Притягивая якорь, это реле фиксирует занятость рельсовой цепи и исключает перевод стрелки под отцепом. Резистор R2 включен для ограничения тока в обмотках ПТ при малых сопротивлениях поездного шунта. В случае прохождения отцепа с высоким сопротивлением поездного шунта реле СП из-за недостаточного тока трансформатора ПТ может не сработать, и стрелка будет переводиться под отцепом. Такую опасность исключают дополнительной фиксацией вступления отцепа на рельсовую цепь педалями П1 и /72.
От вступления первого ската отцепа на педали П1 и 112 срабатывают педальные реле и включают свои повторители в блоке БМП.
Через фронтовые контакты повторительных реле параллельно первичной обмотке трансформатора ПТ подключаются добавочные резисторы 1 и 0,5 кОм. Это увеличивает ток, протекающий через резисторы R1 и R2, и приводит к срабатыванию реле СП.
С целью защиты стрелок от перевода под длиннобазным вагоном, перекрывающим рабочую длину рельсовой цепи, применяют фотоэлектрическое устройство.
Перед рельсовой цепью устанавливают осветитель, фотодатчик и релейную ячейку РЯ-ФУ-72. На горочном посту включают фотоконтрольное реле ФК (НМШ1-2000). Осветитель и фотодатчик расположены так, что обеспечивают перекрытие луча осветителя при прохождении отцепа по стрелке. При отсутствии вагона под действием луча света осветителя фотодатчик ФСК возбуждается, и через реле Ф (РГ1-7) протекает ток.
Реле Ф срабатывает и замыкает контакт JI поляризованного якоря, через который на базу транзистора VT подается отрицательное смещение. Транзистор открывается, и в его коллекторной цепи срабатывает реле ФК, фиксируя свободность рельсовой цепи от отцепа. Перекрытие луча света осветителя вагонами приводит к выключению реле Ф и переключению его контакта в положение /7. Через переключенный контакт на базу транзистора VT подается положительное смещение, транзистор закрывается, выключается реле Ф/С. Размыканием фронтового контакта ФК в цепи реле СП фиксируется занятость стрелки и исключается ее перевод под длиннобазным вагоном.
3 Датчики ФЭУ
4 Датчики РТД-С
5. Датчик индуктивно проводной ИПД
6 Схемы размещения датчиков на поле.
7 Схема управления стрелкой с блоком СГ-66
8 Схема управления стрелкой с блоком СГ-76
9 Схема управления стрелкой с блоком СГ-74
10 Горочная светофорная сигнализация ( входные светофоры и их повторители.)
11 Классификация вагонных замедлителей
12 Конструкции замедлителей типа М-50
13 Конструкции замедлителей типа КНП.
14 Конструкции замедлителей типа КВ, ЦНИИ
15 Схема управления замедлителем
16 Измерение скорости движения отцепов на сортировочной горке.
17 Назначение и принцип работы Вессмеров , Тензометрический весомер.
18 Устройства электропитания.
2.3 Горочные системы автоматизации технических процессов
1.1 Зона действия функциональных подсистем управления технологическими процессами на сортировочных горках.
1.2 Системы обеспечения технических процессов.
2.1 Системы автоматизации технологических процессов схемы построения горочных систем :БГАЦ
2.2 Системы автоматизации технологических процессов схемы построения горочных систем : ГАЦ-КР
2.3 Системы автоматизации технологических процессов схемы построения горочных систем : ГАЦ-МН
3 Схемы защиты от несанкционированного перевода стрелки под отцепом
4.1 Управление скоростью надвига , роспуска и скатывания отцепов. Функциональное построение ГПЗУ
4.2 Управление скоростью надвига , роспуска и скатывания отцепов. Технологическая реализация ГПЗУ.
5 Назначение, устройство и технология использования систем обеспечения технологического процесса АМСГ
6 Управление скоростью надвига роспуска и скатывания отцепов
7 Динамика свободного скатывания отцепов
8 Функциональные схемы микропроцессорных систем автоматизации торможения
9 Принципы реализации прицельного адаптивного торможения отцепов
10.1 Основные требования к заполнению путей сортировочного парка
10.2 Контроль заполнения путей: безстыковой контроль, контроль с применением РТД-С
10.3 Контроль заполнения путей: контроль с применением ИПД, ИЗД
11 Управление компрессорной станцией
12 Диагностика состояния технических средств АМСГ
13 Диагностический контроль датчиков обнаружения отцепов
14 Информационный обмен с АСУ сортировочной станцией
Дата: 2018-12-21, просмотров: 501.