Основная методическая погрешность навигационного автомата счисления пути, основанного на интегрировании скорости относительно воздуха, вызывается отсутствием точной и непрерывной информации на летательном аппарате о скорости ветра. Кроме этого, существуют методические погрешности, вызванные погрешностями датчиков истинной воздушной скорости и курса.
Уравнения в общей форме Х = F1(V, Y, U, d), У = F2(V, Y, U, d), (4.16)
где Х, У – координаты места, то методические погрешности можно определить в линейном приближении путѐм разложения в ряд:
| DХ = (¶F1/¶V)DV + (¶F1/¶Y)DY + (¶F1/¶U)DU + (¶F1/¶d)Dd; | (4.17) |
| DУ = (¶F2/¶V)DV + (¶F2/¶Y)DY + (¶F2/¶U)DU + (¶F2/¶d)Dd, | (4.18) |
– здесь DU, DY, DV, Dd - первичные погрешности в измерении истинной воздушной скорости, истинного курса, скорости и направления ветра.
Погрешности, вызванные неполным учѐтом параметров ветра
Предположим, что каким-либо средством навигации получены сведения о скорости U0 и направлении d0 ветра. Фактические значения скорости и направления ветра U и d. Используя уравнения (4.17, 4.18), найдѐм погрешности в определении координат, вызванные погрешностями в определении скорости DU = U – U0 и направления ветра Dd= d–d0.

| (4.19) |

| (4.20) |
Значение DU может достигать десятков км/час, а угол Dd – единиц градусов (2-3С°). Частота введения поправок на ветер определяется следующим образом. Задаются допустимыми погрешностями измерения координат DS и предполагаемым средним значением скорости ветра DUср, которую не учитывает навигационный автомат. Допустимый интервал времени DTдоп между двумя коррекциями определится как:
DTдоп = DS/DUср. (4.21)
Погрешности навигационных автоматов, вызванные погрешностями определения вектора истинной воздушной скорости
Вектор истинной воздушной скорости V не совпадает с продольной осью летательного аппарата. Наличие углов атаки a, скольжения b приводит к тому, что фактическое движение в горизонтальной плоскости относительно воздуха определяется уравнениями

| (4.22) |

| (4.23) |
Vг = V·cosq; Vхо = V·cosa·cosb; Vг = Vхо·cosq/(cosa·cosb), (4.24)
здесь Vг – горизонтальная составляющая истинной воздушной скорости; q – угол наклона траектории; a – угол атаки; b – угол скольжения.
Навигационный автомат получает от датчика скорости составляющую Vх истинной воздушной скорости вдоль оси приѐмника воздушных давлений, отличающуюся от фактической осевой составляющей скорости Vхо на величину DVх = Vх – Vхо. Предположим, что на летательном аппарате отсутствуют измерители углов атаки и скольжения, а в навигационном автомате не учитывается угол наклона траектории. Погрешности навигационного автомата, вызванные указанными выше причинами, будут:
| (4.25) |
| (4.26) |
Наиболее существенные погрешности счисления пути, вызванные углом скольжения , и погрешности датчика скорости DVх. Влияние углов атаки и наклона траектории сказываются в меньшей степени. Так, например, при постоянных углах a= b=q = 1° погрешности счисления пути от угла скольжения составляют 1,75%, а от углов атаки и наклона траектории – 0,03% от пройденного расстояния. Для маневренных летательных аппаратов углы q могут меняться в широких пределах, вследствие чего погрешности счисления пути могут оказаться значительными. Чтобы уменьшить эти погрешности, необходимо использовать сигналы гировертикали, датчиков углов атаки и скольжения для вычисления горизонтальной составляющей Vг истинной воздушной скорости.
Погрешности навигационных автоматов, вызванные погрешностями определения курса
Поскольку в вычислителе осуществляется интегрирование функций VsinY и VcosY, то для выяснения влияния погрешности датчика курса важно определить, является ли его погрешность независимой от времени, или функцией времени. С этой точки зрения погрешности датчика курса можно разделить на две группы: 1) независимые от времени погрешности (девиация, застой и др.); 2) периодические во времени погрешности (вызванные колебаниями в следящей системе или колебаниями чувствительного элемента); поворотные погрешности – не периодические, но зависимые от времени. Полагая скорость ветра U = 0 и обозначив независимые от времени погрешности датчика курса через DY, получим значения погрешностей навигационного автомата DХк, DУк:

| (4.32) |
| (4.33) |
Полагая DY малым, имеем
sinDY = DY; cosDY = 1;
sin(Y + DY) = sinY + DYcosY; cos(Y + DY) = cosY – DYsinY.
Тогда
| (4.34) |

| (4.35) |
Полная погрешность DSк равна
| (4.36) |
При V = const DSк = V·t·DY = S·DY, (4.37)
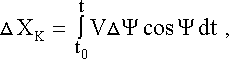
здесь S – путь, пройденный летательным аппаратом за время t по кратчайшему расстоянию от точки вылета. На рис. 4.4, а показано геометрическое построение, на основании которого может быть найдена погрешность DSк навигационного автомата при известной ошибке DY датчика курса; здесь OA = OB = S.
Рис. 4.4. Погрешности навигационного автомата, вызванные погрешностями датчика курса
Рассмотрим влияние периодических погрешностей датчика курса на показания навигационного автомата. Положим, что датчик курса выдаѐт навигационному автомату курс
Y = Yср + DY~, (4.38)
здесь Yср – средний курс, при отсутствии постоянной погрешности является истинным курсом;
DY~ – периодическая погрешность датчика курса.
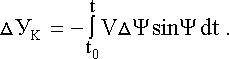
Возникающая при этом погрешность навигационного автомата может быть получена из простейших геометрических построений. На рис. 4.4, б кривая 1 представляет истинную траекторию летательного аппарата, кривая 2 – кажущуюся (отсчитываемую навигационным автоматом) траекторию, которая имеет вид волнообразной линии вследствие периодических погрешностей датчика курса.
Длины кривых 1 и 2 одинаковы. Точка A определяет истинное местоположение ЛА, точка B – кажущееся местоположение, отсчитываемое навигационным автоматом.
Вследствие периодической погрешности датчика курса навигационный автомат будет всегда показывать расстояние меньше истинного.
Периодические погрешности датчика курса с большой амплитудой недопустимы
Дата: 2018-09-13, просмотров: 916.