Важной составной частью астроориентатора является автоматический секстант. На рис. 2.16 приведена схема секстанта, пеленгаторное устройство которого связано через редуктор отрабатывающего двигателя с корпусом летательного аппарата.
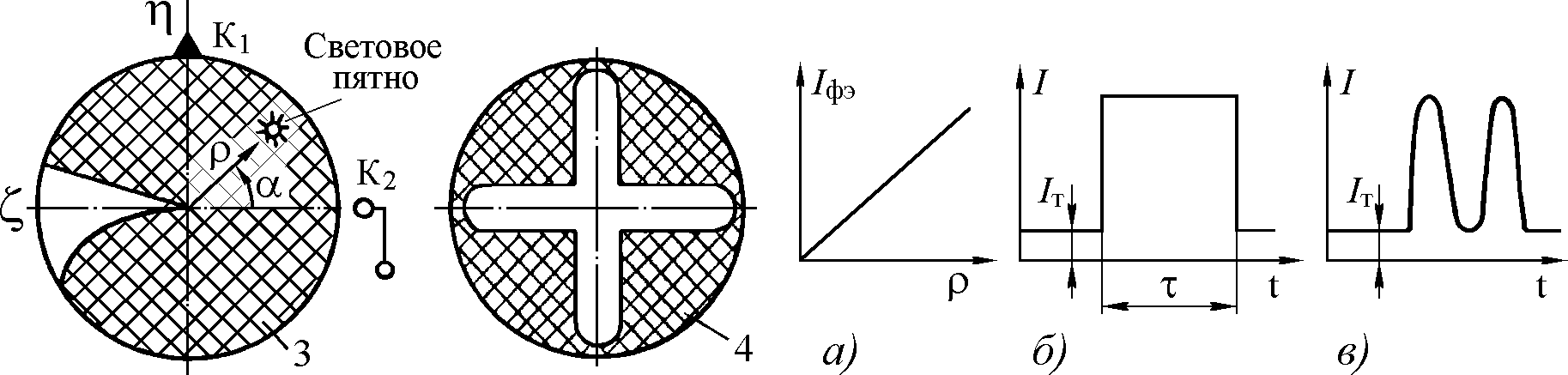
Рис. 2.16. Принципиальная схема автоматического секстанта
Телескоп 15 автоматически направляется на небесное светило. Отклонение телескопа от направления на светило вызывает сигнал на выходе фотоумножителя 5, который после усиления передаѐтся через коммутатор на двигатель отработки по высоте 14 и курсовому углу 12. Отработка про- изводится вокруг вертикальной оси У' и горизонтальной оси Х' относительно корпуса летательного аппарата 11. Телескоп 15 опирается на ось 9, подвешенную в карданной раме 10. Эта рама может поворачиваться в азимуте на оси 13 опоры.
Высоту светила h измеряют относительно электролитического уровня 7, который удерживается в нейтральном положении с помощью двигателя 6. Уровень отрабатывается механизмом только в плоскости У'Z'.
Рассмотрим работу фотоследящей системы. Световой поток Ф попадает на линзу 1, после чего он превращается в пучок сходящихся лучей и направляется через диафрагмы 3 и 4 на катод фотоумножителя 5.
Диафрагмы 3, 4 (вращаются двигателем 2) обеспечивают изменение силы тока фотоумножителя в зависимости от угла отклонения оптической оси телескопа от направления на светило, а также модуляцию светового потока для исключения влияния фона неба на точность пеленгации.
Чем дальше отклоняется световое пятно от центра диафрагмы 3 (с секторным вырезом, рис. 2.17), тем большее время будет освещѐн фото- катод, следовательно, больше среднее значение фототока (рис. 2.17, а).
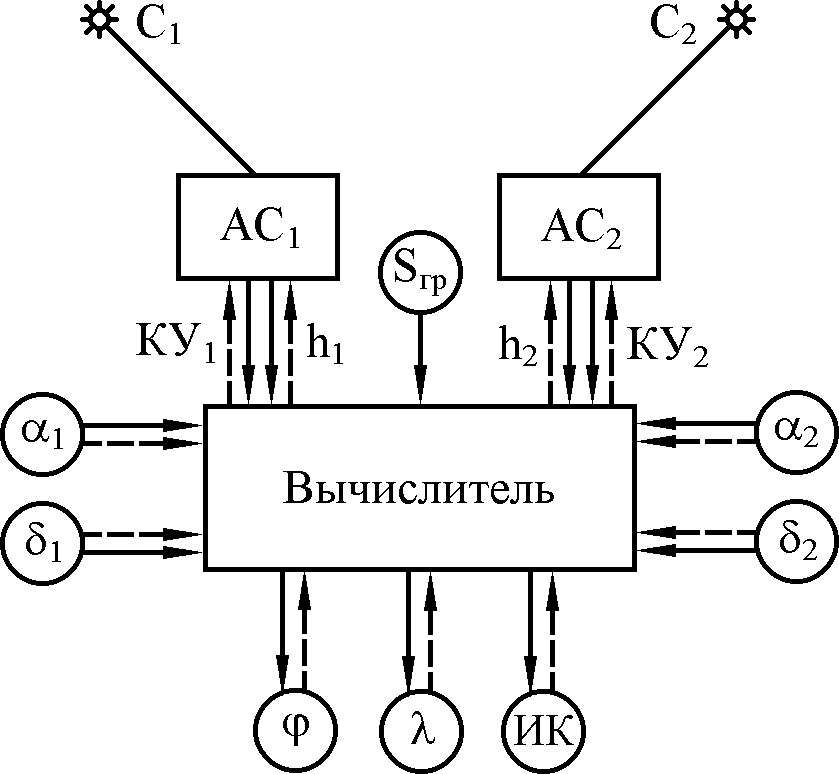
Рис. 2.17. Принцип работы фотоследящей системы
Для определения углового положения a светового пятна относительно осей координат hz, жѐстко связанных с телескопом, используют контакт К1 на диафрагме 3 и контакт К2 на телескопе. При вращении диафрагмы 3 контакт К1 касается контакта К2 и отпирает входной каскад усилителя.
Для определения углового положения a светового пятна относительно осей координат hz, жѐстко связанных с телескопом, используют контакт К1 на диафрагме 3 и контакт К2 на телескопе. При вращении диафрагмы 3 контакт К1 касается контакта К2 и отпирает входной каскад усилителя.
13. Устройство астроориентатора горизонтальной системы координат.
Наиболее простым является астроориентатор, основанный на пеленга- ции двух звѐзд. В нѐм с помощью двух автоматических секстантов изме- ряются высоты и курсовые углы двух звѐзд. В вычислителе определяются координаты места самолѐта (методом кругов равных высот) и курс. Измеренные высоты светил связаны с координатами места самолѐта зависимостями (2.10). Знание географических координат места самолѐта позволяет получить азимут светила А. Вычисленное значение азимута и измеренный курсовой угол светила дают истинный курс самолѐта ИК = А – КУ. Измерение истинного курса осуществляется по одному светилу. Структурная схема астроориентатора представлена на рис. 2.18.
 Рис. 2.18. Структурная схема горизонтального астроориентатора
Рис. 2.18. Структурная схема горизонтального астроориентатора
Настройка астроориентатора на выбранные звѐзды осуществляется путѐм решения в вычислителе обратной задачи. По экваториальным координатам светил, гринвичскому звѐздному времени, координатам места самолѐта и курсу определяются высоты и курсовые углы выбранных светил и передаются на автоматические секстанты (АСi). Секстанты устанавливаются в направлении на выбранные светила. Этот режим работы на рис. 2.18 показан пунктирными линиями. Примером такого прибора является астроориентатор БЦ-63, в котором по исходным данным j0, l0, d1, a1,
d2, a2, Sгр непрерывно вычисляются азимуты и высоты светил А1, А2, h1, h2. Вычисленные значения высот светил сравниваются с высотами, измеренными с помощью автоматических секстантов. Знание разности Dhi = hИЗМi – hi и азимутов Аi позволяет определить поправки в значения широты Dj и долготы Dl места самолѐта
j = j0 + Dj; l = l0 + Dl. (2.11)
Для вычисления высот и азимутов светил в астроориентаторе используются соотношения (1.21, 1.22) в несколько преобразованном виде
cosAi·coshi = sindi·cosj – cosdi·sinj·cos(Sгр – ai + l);
sinAi·coshi = – cosdi·sin(Sгр – ai + l). (2.12)
Приращения широты и долготы места вычисляются по формулам
| Dj = - sin A2 ·Dh1 - sin A1·Dh2 ; sin( A2 - A1 ) | |
| Dl = - cos A1·Dh2 - cos A2 ·Dh1 , cosj·sin( A2 - A1 ) | (2.13) |
здесь Dhi = hИЗМi – hi.
Полученные географические координаты места самолѐта j, l поступают на указатели и в канал вычисления ортодромических координат.
Дата: 2018-09-13, просмотров: 1050.