3.1 Назначение системы управления. Возможности и функции
Система автоматического управления системой сортировки грузов предназначена для автоматического управления, контроля и защиты оборудования. Система предусматривает как автономный режим, так и режим ручного управления.
Система автоматического управления имеет следующие функциональные возможности:
– непрерывный контроль и измерение технологических параметров;
– автоматический контроль положения грузов;
– управление электродвигателями, в случае неисправности ПЧ (релейное управление);
– ручное управление электродвигателями со шкафа ПЧ и панели оператора;
– защита электрооборудования САУ сортировкой от перегрузок по току и короткого замыкания;
– диагностирование неисправностей и работоспособности системы;
– отображение текстовой и графической информации о состоянии технологического процесса и оборудования на панели оператора;
– автоматическое определение и отображение об отклонении от технологических параметров;
– резервирование данных, на случай отказа основного контроллера;
Различные методы управления позволяют, в случае неисправности или отказа оборудования, без затруднения заменить тот, или иной агрегат, не останавливая технологический процесс.
3.2 Определение и выбор среды разработки программного обеспечения
Программируемые логические контроллеры (ПЛК), являются широко распространенными средствами автоматизации в составе локальных и распределенных систем контроля и управления.
Языки программирования ПЛК во многом определяются конкретными приложениями, а также требованиями современных сложных распределенных систем управления. Графическое представление прикладных программ – это типичная особенность программирования ПЛК. Текстовые языки широко используются при программировании компьютеров.
Программирование логики ведется с применением языков SFC, LD, FBD, IL, ST, а также дополнительных интерактивных редакторов для описания переменных, определений и конфигурации ввода/вывода.
Все языки программирования контроллеров взаимоувязаны – для них стандарт определяет единые модели ПО, связных функциональных блоков и модель собственно программирования. Стандартизированы общие элементы этих языков и, прежде всего, используемые символы, типы данных и переменные. Определены функции и функциональные блоки, их декларации, наборы стандартных функций и функциональных блоков, понятия программ на этих языках. Стандарт определяет и такие общие элементы, как конфигурации, ресурсы, пути доступа, задачи. Все это дает возможность программирования на любом из этих языков с обеспечением генерации кодов единой программы. Языки программирования определены в стандарте таким образом, что допускают разработку приложений на их смеси, которая впоследствии собирается в единую исполняемую программу. Кроме того, стандарт открыт для использования других языков программирования. И, наконец, в стандарте рассмотрена специфика каждого из языков.
Concept содержит следующие IEC языки программирования:
LD (Ladder Diagram) – вариант класса языков релейно-контактных схем;
FBD (Functional Block Diagram) – аналогичен функциональной схеме электронного устройства с использованием логических элементов;
SFC (Sequential Function Chart) – язык диаграммного типа, аналогичный блок-схемам алгоритмов;
ST (Structured Text) – текстовый высокоуровневый язык общего назначения, по синтаксису напоминает Паскаль;
IL (Instruction List) – текстовый язык низкого уровня, по синтаксису напоминает Ассемблер.
LL984 – Modsoft-ориентированную лестничную диаграмму.
Управляющая программа создается из секций согласно логической структуре. Внутри секции используется только один язык программирования. Базисными элементами языка программирования являются FBD согласно IEC функций и функциональные блоки, которые являются связываемыми логическими единицами.
Переменные для связывания базисных элементов внутри секции не требуются для графических языков программирования FBD, LD, SFC и LL984 , потому что эти связи реализованы через соединения. Остальные переменные, например, для передачи данных между различными секциями, конфигурируются с помощью редактора переменных.
Среда разработки Concept 2.6. фирмы Schneider Electric выбрана для создания управляющей программы, т.к. она ориентирована по данный класс микроконтроллеров.
3.3 Устройство САУ сортировки грузов
Система состоит из программируемого логического контроллера, диспетчерского пункта управления, датчиков контроля положения грузов на конвейерной ленте, датчиков крайнего положения толкателей, девяти асинхронных электродвигателей и четырёх преобразователей частоты.
Система передачи данных (рисунок 2.16) между устройствами осуществляется по шине ModBus с использованием интерфейса RS-485.
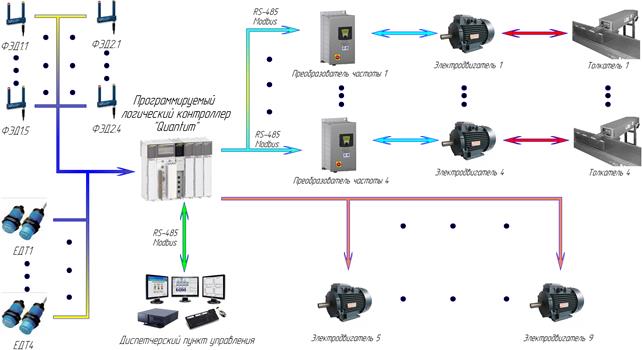
Рисунок 2.16 - Устройство САУ сортировки грузов
С датчков контроля положения грузов и контроля крайнего положения толкателей информация поступает посредством двухпроводной системы межблочной коммутации в программируемый логический контроллер, который подаёт управляющие сигналы на соответствующие преобразователи частоты по промышленной сети ModBus с интерфейсом RS-485. Преобразователи частоты подают асинхронным электродвигателям соответствующее напряжение и частоту через силовые кабели. Электродвигатель сопряжён с толкателем через муфту. Человеко-машинный интерфейс реализован удалённо по сети ModBus (RS-485) в диспетчерском пункте управления.
3.4 Блок-схема алгоритма работы САУ
Алгоритм решения задачи получается более эффективным, если использовать метод пошаговой разработки, суть которого заключается в том, что алгоритм разрабатывается «сверху вниз». Вначале определяется общий подход к решению задачи, затем выделяются отдельные самостоятельные части, которые выполняют какую-то конечную обработку данных. Каждая из выделенных частей в свою очередь может разбиваться на отдельные части. Такой подход позволяет разбить алгоритм на части (блоки, модули), каждая из которых решает самостоятельную подзадачу. Каждый из модулей (блоков) реализуется в виде отдельной процедуры или функции. Тогда решение задачи состоит из последовательного вызова процедур.
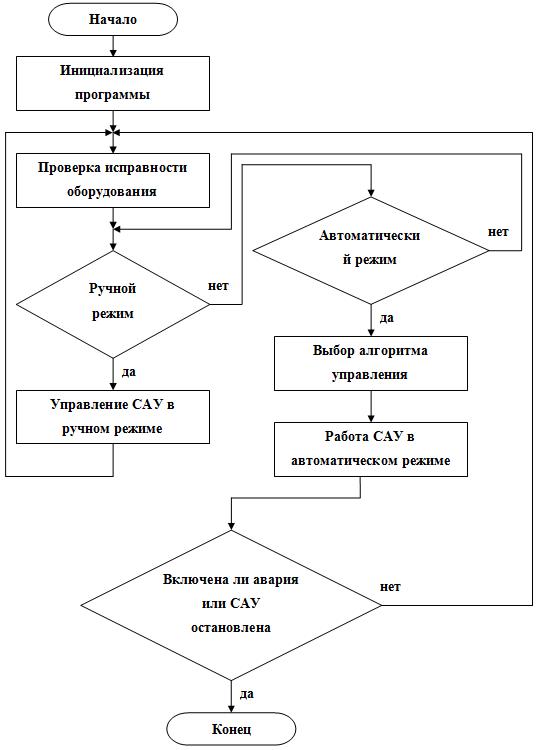
Рисунок 3.1 - Блок-схема алгоритма работы САУ
Работа блок-схемы алгоритма. При запуске системы происходит инициализация всех переменных, счетчиков, таймеров и других функций. В зависимости от положения переключателя «Местное/Дистанционное» управление системой осуществляется со шкафа управления («Местное») или с диспетчерского пункта управления («Дистанционное»).
В автоматическом режиме асинхронные двигатели подключаются к сети через преобразователь частоты (Автоматическое управление) или напрямую в сеть (Релейное управление в случае неисправности преобразователя частоты ). В автоматическом режиме проверяется готовность ПЧ, а так же его неисправность. Проверяется готовность всех электродвигателей и датчиков. В ручном режиме возможно отключение двигателей от сети. Местное управление необходимо для отладки и ремонта системы. Блок–схема управляющего алгоритма изображена на рисунке 3.1.
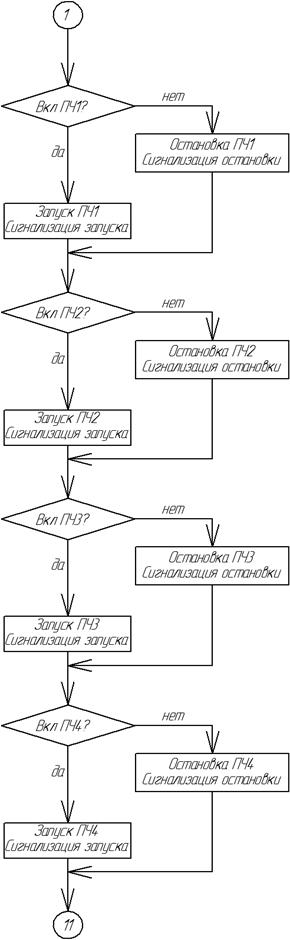
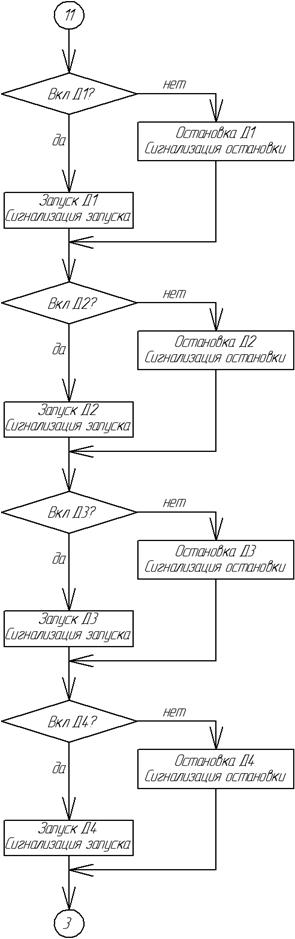
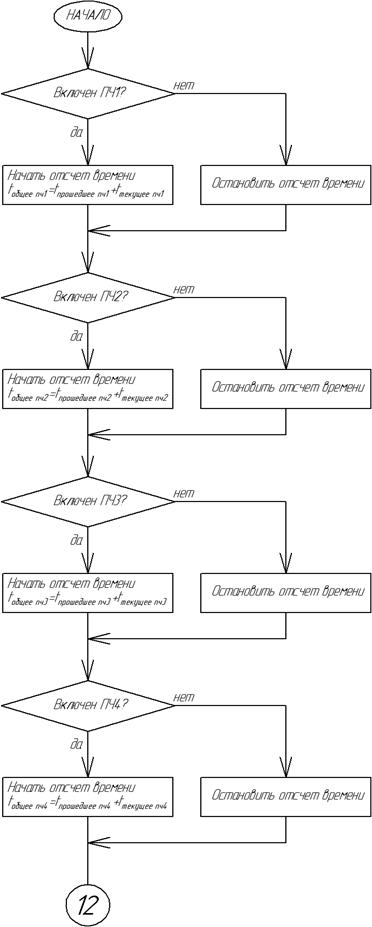
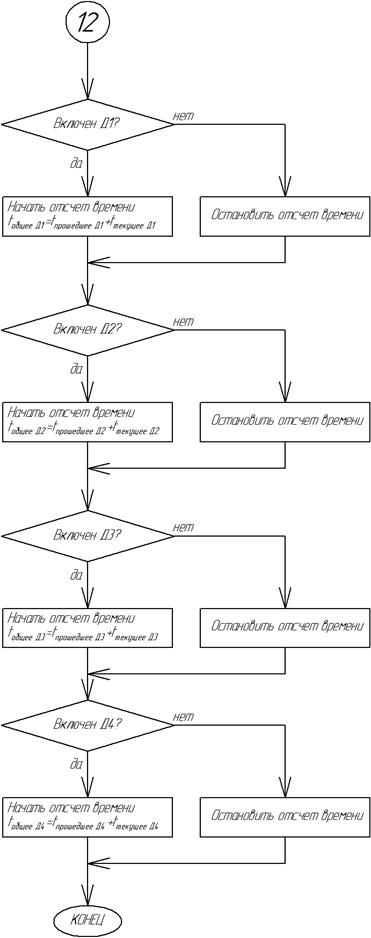
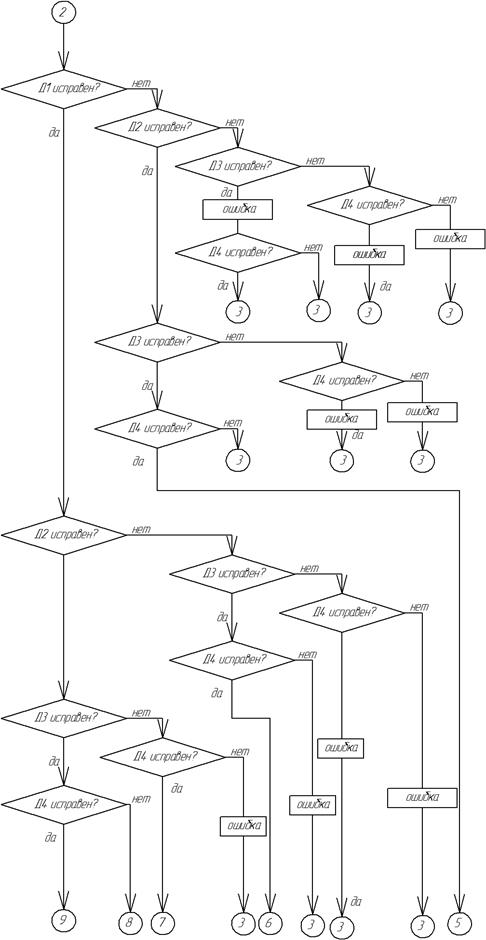
3.5 Блок-схема алгоритма управляющей программы
По обобщённой блок-схеме алгоритма работы системы получим блок-схему в развёрнутом виде, представленную на рисунке 3.2, отражающую работу управляющей программы.
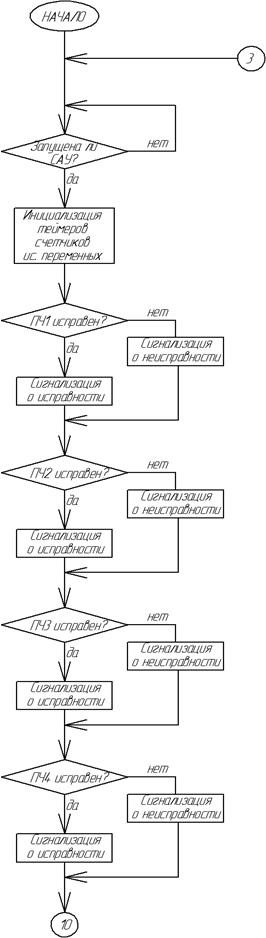
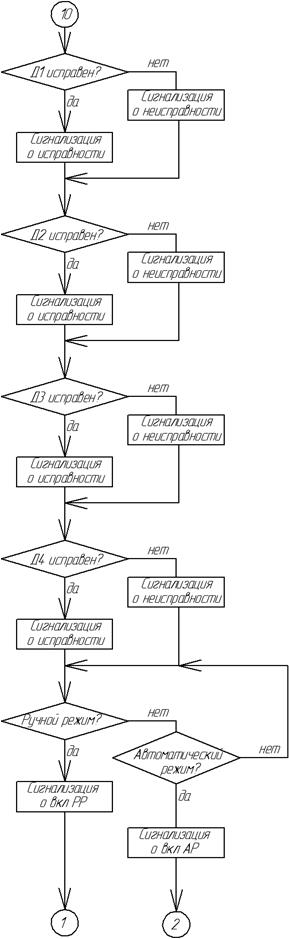
Рисунок 3.2 – Блок-схема алгоритма управляющей программы
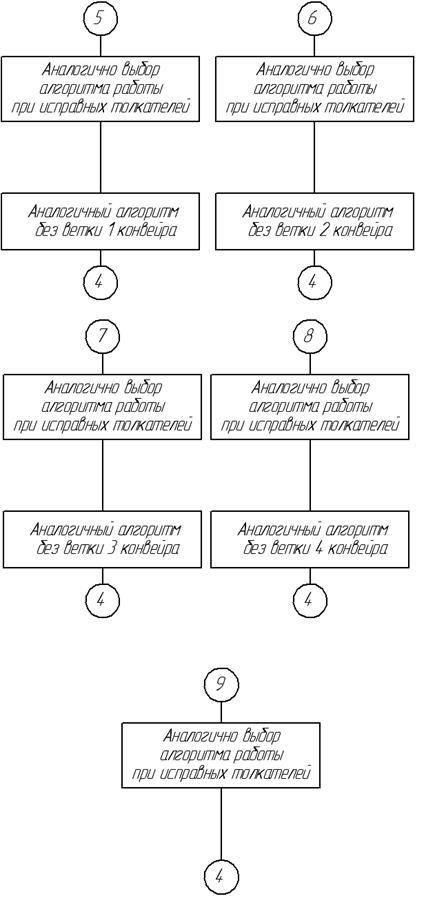
Продолжение рисунка 3.2
Продолжение рисунка 3.2
Продолжение рисунка 3.2
Продолжение рисунка 3.2
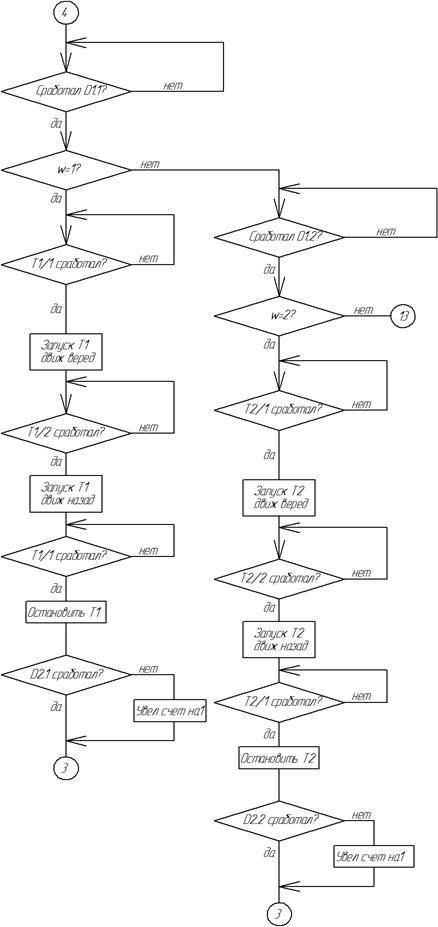
Продолжение рисунка 3.2
Продолжение рисунка 3.2
Продолжение рисунка 3.2
Продолжение рисунка 3.2
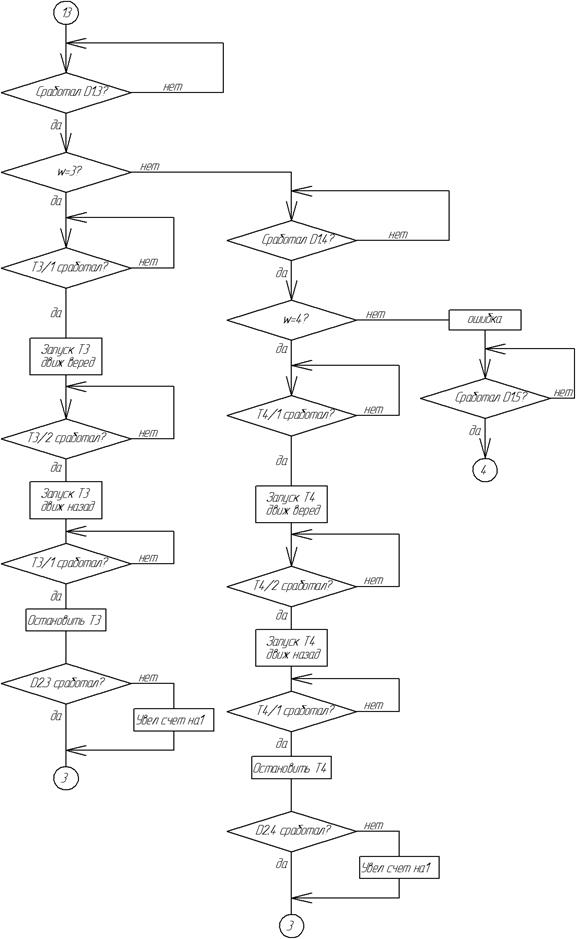
Продолжение рисунка 3.2
3.6. Программа управления САУ
Для создания управляющей программы введены переменные, которые изображены на рисунке 3.3.
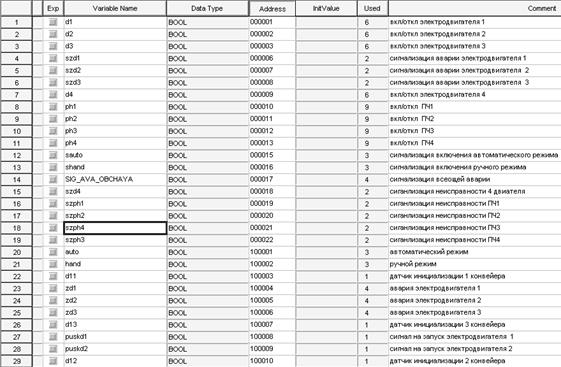
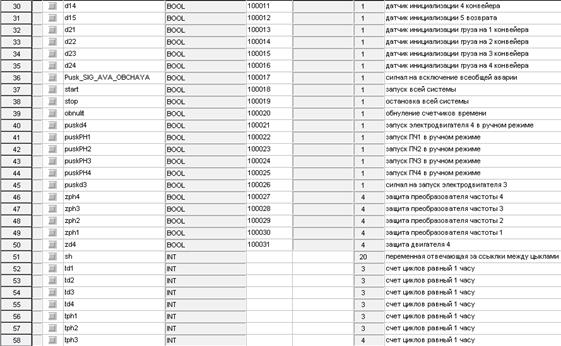
Рисунок 3.3 – Окно ввода переменных
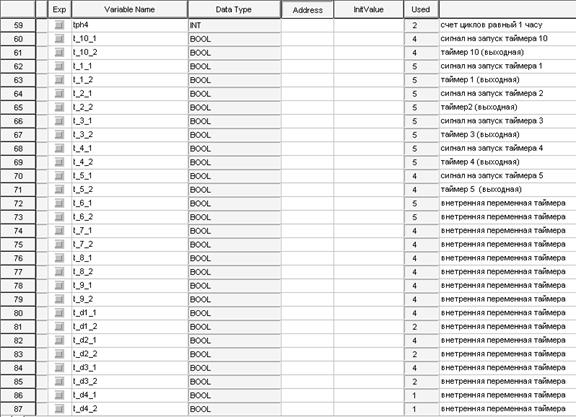

Продолжение рисунка 3.3
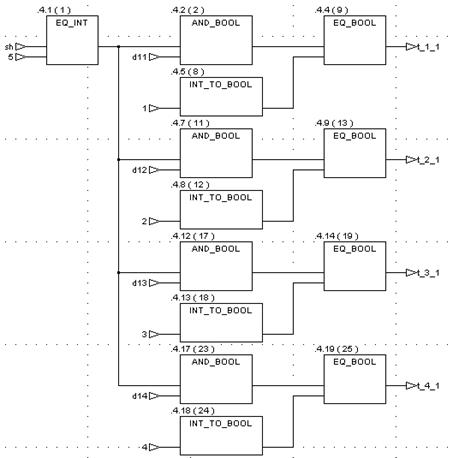
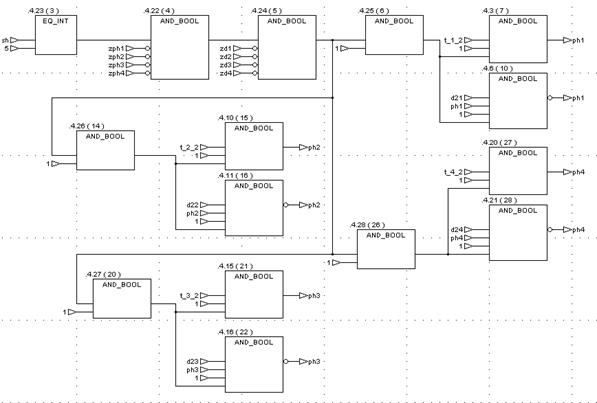
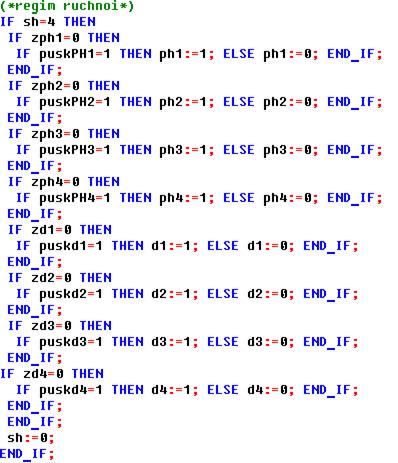
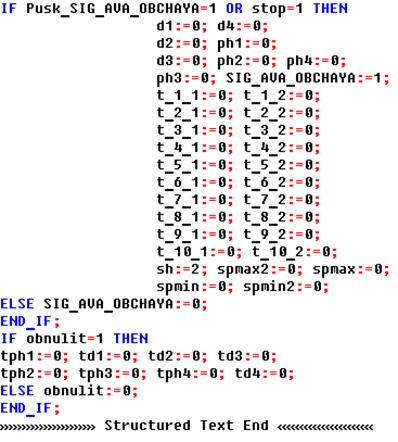
Листинг кода управляющей программы приведён на рисунке 3.4.
Рисунок 3.4 – Программный код управляющей программы
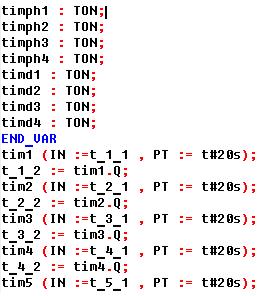
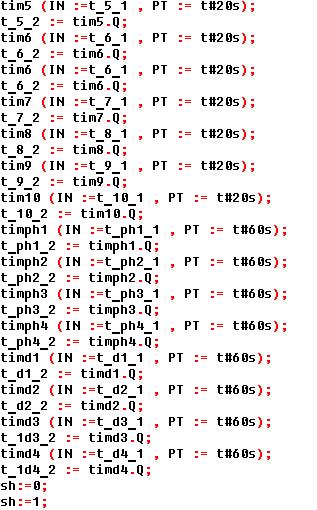
Продолжение рисунка 3.4
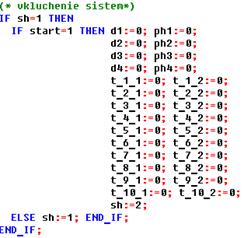
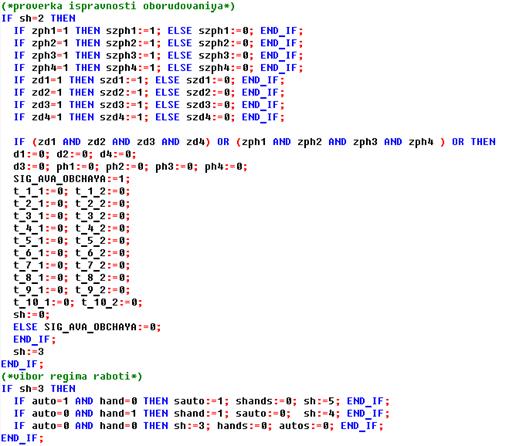
Продолжение рисунка 3.4
Продолжение рисунка 3.4
Продолжение рисунка 3.4
Дата: 2018-11-18, просмотров: 676.