2.1 Технологическая схема САУ
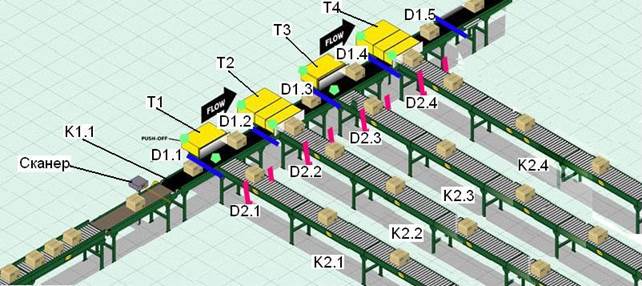
Рисунок 2.1 – Технологическая схема системы
В состав разрабатываемой мехатронной системы (рисунок 2.1) входят основные узлы и агрегаты: «сканер», предназначенный для присвоения внутрисистемного адреса грузу, «К1.1» конвейер главного движения; «К2.1» - первый конвейер второстепенного хода; «К2.2» - второй конвейер второстепенного хода; «К2.3» - третий конвейер второстепенного хода; «К2.4» - четвёртый конвейер второстепенного хода; «D1.1» - первый световой фотоэлектрический датчик контроля положения груза на ленте конвейера главного движения; «D1.2» - второй световой фотоэлектрический датчик контроля положения груза на ленте конвейера главного движения; «D1.3» - третий световой фотоэлектрический датчик контроля положения груза на ленте конвейера главного движения; «D1.4» - четвёртый световой фотоэлектрический датчик контроля положения груза на ленте конвейера главного движения; «D1.5» - пятый световой фотоэлектрический датчик контроля положения груза на ленте конвейера главного движения; «D2.1» - первый световой фотоэлектрический датчик контроля положения груза на ленте конвейера второстепенного движения; «D2.2» - второй световой фотоэлектрический датчик контроля положения груза на ленте конвейера второстепенного движения; «D2.3» - третий световой фотоэлектрический датчик контроля положения груза на ленте конвейера второстепенного движения; «D2.4» - четвёртый световой фотоэлектрический датчик контроля положения груза на ленте конвейера второстепенного движения.
2.2 Функциональное описание разрабатываемой САУ
Автоматический склад подразумевает под собой хорошо отлаженную систему с соблюдением самых точных требований по подготовке груза и его дальнейшей транспортировки и хранению. Именно поэтому процесс подготовки груза является основополагающим. Прибывший на склад груз должен иметь стандартную упаковку и маркировку.(груз упаковывается и маркируется на месте отправки). Поступив на склад груз выгружается на конвейерную ленту. С пункта приёмки грузы переходят в пункт сортировки заведомо расставленные на приблизительно одинаковое расстояние друг от друга и с нанесённой на них этикеткой со штрих-кодом, в ведомости указано в какую часть склада должен быть перенаправлен груз системой сортировки. По конвейерной ленте груз проходит зону внутрискладской адресации, которая обеспечивается сканером штрих-кода, формирующим последовательность чисел, эта последовательность указывает системе на последовательность срабатывания сталкивателей. Затем груз будет отправляется на следующие стадии технологического процесса обработки грузов.
2.3 Выбор и обоснование базовых элементов для реализации системы
По существующим требованиям технологического процесса сортировки грузов необходимо разработать систему управления автоматической сортировки на складе.
Для реализации автоматической системы сортировки необходимо подобрать котроллер, а так же платы расширения, преобразователи частоты, датчики контроля крайнего положения толкателей и датчики контроля положения грузов на конвейерной ленте главного и второстепенных движений.
Термином ПЛК обозначают устройства, осуществляющие преобразование, обработку, хранение информации и выработку команд управления или управляющих регулирующих воздействий, реализованные на базе микропроцессорной техники и являющиеся, по сути, специализированными управляющими вычислительными комплексами для работы в локальных и распределенных системах управления в реальном масштабе времени.
2.4 Технические характеристики базовых элементов системы
Блочная система управления на базе ПЛК Quantum фирмы Shnider Electric состоит из следующих блоков

Рисунок 2.2 - Состав программируемого логического контроллера
На рисунке 2.2 в слоте 1 изображён источник питания 140CPS11100. Его технические характеристики приведены в таблице 2.1.
Таблица 2.1 - Характеристики источника питания.
| Входное напряжение | 120...230 V пер. ток 100...276 V 47...63 Hz |
| Входной ток | 200 mA при 230 V 400 mA при 115 V |
| Макс. пусковой ток | 10 A при 230 V 20 A при 115 V |
| Номинальная мощность, ВА | 50 VA |
| Соответствующий номинал предохранителя | 1,5 A предохранитель с задержкой срабатывания |
| Гармонические искажения | <= 10 % действующего значения основной гармоники |
| Выходное напряжение | 5,1 В пост. ток |
| Выходной ток источника питания | 3 A |
| Защита от перенапряжения на выходе | Встроенный |
| Защита от перегрузки на выходе | Встроенный |
| Рассеиваемая мощность | 2 + (3 x Iout), где Iout в A |
| Сигнализация | 1 светодиод зеленый , function: мощность (PWR OK) |
| Маркировка | CE |
| Формат модуля | Стандарт |
| Масса продукта | 0,65 kg |
На рисунке 2.2 в слоте 2 изображён блок центрального процессорного устройства 140CPU11302. Его технические характеристики приведены в таблице 2.2.
Промышленный логический контроллер Quantum отлично подходит для сложных процессов. Производительность процессоров этого решения обеспечивает оптимальное время циклов, объединяя еще больше возможностей обмена данными и диагностики, гибкость памяти и хранение данных. Quantum включает сбалансированный ЦП, способный обеспечить максимальную производительность при работе с логическими инструкциями и инструкциями с плавающей запятой...
5 языков МЭК, стандартная версия: LD, ST, FBD, SFC, IL
- Многозадачная система высокого уровня
- Емкость памяти до 7 Мб с использованием плат расширения PCMCIA
- Специальная форма для сред управления процессами с модулями с конфорным покрытием, безопасными вводами/выводами и большим каталогом партнерских модулей
- Процессоры безопасности и модули ввода/вывода
- Высокопроизводительные решения Plug & Play с горячим резервированием с LCD-клавиатурой для локального мониторинга
- Многочисленные встроенные порты (порт ISB, порт Ethernet TCP/IP с веб-сервером, Modbus Plus и минимум 1 последовательный порт Modbus) на передней панели
Таблица 2.2 - Характеристики микропроцессора
| Семейство продуктов | Платформа автоматизации Modicon Quantum |
| Тип изделия или компонента | Процессор |
| Наименование программного обеспечения | Concept ProWORX 32 |
| Наименование процессора | 80186 |
| Математический сопроцессор | Без |
| Частота синхронизации | 20 MHz |
| Описание памяти | Память вв/выв. 8192 вх./8192 вых. бит Пользовательская логика IEC 109 Кбайт Регистр 0...9999 слов |
На рисунке 2.2 в слоте 3 и 4 изображены модули дискретного ввода 140DAI74000. Технические характеристики приведены в таблице 2.3.

Рисунок 2.3. - Модуль дискретного ввода 140DAI74000
Таблица 2.3 – Характеристики модуля дискретного ввода
| Семейство продуктов | Платформа автоматизации Modicon Quantum |
| Тип изделия или компонента | Модули дискретных входов пер. тока |
| Наименование программного обеспечения | Concept ProWORX 32 Unity Pro |
| Количество дискретных входов | 16 |
| Группа каналов | 16 |
| Напряжение дискретного входа | 230 V пер. ток |
| Сигнализация | 1 светодиод зеленый , function: производится обмен данными по шине (Active) отказ (F) 16 светодиодов зеленый , |
На рисунке 2.2 в слоте 5 и 6 изображены модули дискретного вывода 140DAO84000. Технические характеристики приведены в таблице 2.4.

Рисунок 2.4 - Модуль дискретного вывода 140DAO84000
Таблица 2.4 – Технические характеристики модуля дискретного вывода
| Семейство продуктов | Платформа автоматизации Modicon Quantum |
| Тип изделия или компонента | Модули дискретного вывода переменного тока |
| Количество дискретных выходов | 16 |
| Тип дискретного выхода | Гальв. развязанный |
| Группа каналов | 16 групп по 1 каналу |
| Напряжение дискретного выхода | 20...253 V пер. ток |
Система управления в общем виде представлена на рисунке 2.5.

Рисунок 2.5 – Общий вид ПЛК
Для перемещения грузов с конвейера на конвейер в автоматических системах сортировки применяют гидравлические, электропневматические, электромагнитные и электромеханические толкатели, основной проблемой таких устройств является оптимальное сочетание плавности и скорости выполнения своей технологической задачи для обеспечения качества операций с грузами.
Например, в системах сортировки багажа аэропортов используются толкатели типов Т569П (рисунок 2.6) и Т593 (рисунок 2.7). Аналогичные толкатели применяются в системах сортировки автоматических складских комплексов.
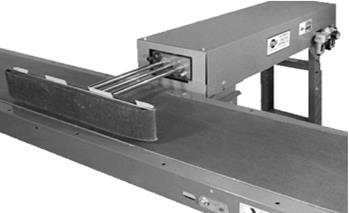
Рисунок 2.6. - Толкатель Т569П

Рисунок 2.7 – Толкатель Т593
Характеристики толкателя Т593:
- Мотор-редуктор 75 кВт смонтированный на валу
- Облицовка плуга резиной стойкой к ударным нагрузкам
- Оптимизированное движение плеча толкателя
- Время цикла
- Высокая пропускная способность сортировки
- Скорость конвейера сортировки
- Багаж перемещается в «виртуальные» окна максимальной длиной 2 м
- Завершение движения определяется CAMS
- Вращение мотора на 360 градусов за один полный цикл
- Необслуживаемые подшипники
- Гибкость проектных решений
- Современная система управления на базе ПЛК
В данной разрабатываемой системе сортировки будет применён толкатель Т569П, так как должна соблюдаться ориентация груза на конвейерной ленте. Но у данного толкателя есть ряд конструктивных недостатков таких, как преобразование вращательного движения в поступательное посредством передачи зубчатое колесо – рейка.
Замена передачи колесо-рейка на шариковинтовую, которая располагается соосно двигателю, как нельзя лучше скажется на упрощении конструкции и увеличению срока службы основных деталей толкателя.
Емкостные датчики крайнего положения толкателей

Рисунок 2.8 - Емкостной датчик приближения
Емкостные выключатели срабатывают как от электропроводящих объектов, так и от диэлектриков. При воздействии объектов из электропроводящих материалов реальное расстояние срабатывания Sr максимально, а при воздействии объектов из диэлектрических материалов расстояние Sr уменьшается в зависимости от диэлектрической проницаемости материала er (см. график зависимости Sr от er и таблицу диэлектрической проницаемости материалов).
При работе с объектами из различных материалов, с разной диэлектрической проницаемостью, необходимо пользоваться графиком зависимости Sr от er.
Номинальное расстояние срабатывания (Sn) и гарантированный интервал воздействия (Sa), указанные в технических характеристиках выключателей, относятся к заземленному металлическому объекту воздействия (Sr=100%).
Соотношение для определения реального расстояния срабатывания
(Sr): 0,9 Sn < Sr < 1,1 Sn.
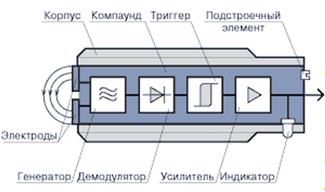
Рисунок 2.9 – Устройство емкостного датчика
Разнообразие объектов воздействия, вызывающих срабатывание емкостных выключателей, обуславливает широкий спектр областей, в которых они применяются.
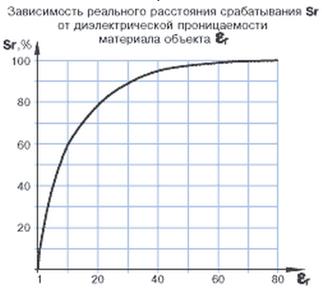
Рисунок 2.10 – График зависимости реального расстояния срабатывания
датчика от диэлектрической проницаемости материала объекта
Наибольший эффект достигается при использовании в системах:
- контроля уровня наполнения резервуаров, емкостей, контейнеров сыпучими и жидкими материалами;
- контроля уровня содержимого в упаковке, в таре;
- сигнализации разрыва лент;
- счета и позиционирования объектов любого рода.
Возможно применение емкостных выключателей в пищевой и в химической отраслях промышленности. При этом для исключения непосредственного контакта активной поверхности выключателя с пищевыми продуктами или же с химически агрессивными средами, можно рекомендовать использовать защитную диэлектрическую перегородку, изготовленную из соответствующих материалов.
При необходимости обнаружения веществ и материалов, находящихся за металлической стенкой, в ней следует выполнить окно, закрытое диэлектрической перегородкой, перед которой устанавливают емкостный выключатель. Толщина перегородки должна быть значительно меньше расстояния воздействия выключателя, а диэлектрик должен иметь малую диэлектрическую проницаемость er.
Световой датчик контроля положения грузов на конвейерной системе (рисунок 2.11). Технические характеристики приведены в таблице 2.5.

Рисунок 2.11 - Фотоэлектрический датчик
Таблица 2.5 – Технические характеристики фотоэлектрического датчика
| Габаритные размеры | 23,5 х 74,5 х 63 мм |
| Материал корпуса | пластик |
| Напряжение питания | 10…30 В пост. тока, 12…240 В пост. тока/24…240 В перем. тока |
| Тип выходного сигнала | NPN/PNP/реле SPDT |
| Класс защиты | IP66 |
| Диапазон рабочих температур | -25...55°C |
| Макс. диапазон работы | 0…45 м |
| Частота работы | 25 Гц / 1000 Гц |
| Источник излучения | красный светодиод |
| Подключение | терминал/разъем/кабель |
Промышленный автоматический сканер штрих-кода (рисунок 2.12). Технические характеристики приведены в таблице 2.6.

Рисунок 2.12 - Автоматический стационарный сканер штрих-кода
Таблица 2.6 - Технические характеристики Argus DX8200А
| Вес | 11 кг |
| Материал корпуса | Сталь |
| Размеры | 470 х 300 х 147 мм |
| Напряжение питания | От 20 до 30Vdc или от 85 до 264 Vdc |
| Расстояние считывания | От 30 до 1800 мм |
| Скорость считывания | 1000 скан./сек |
| Макс. разрешение | 0, 25мм |
| Считываемые коды | Все наиболее используемые символики штрих-кодов |
| Тип считывателя | Лазер |
| Интерфейсы | RS232, RS485, Ethernet |
| Рабочая температура | 0 - 50°С |
| Температура хранения | -20 - 70°С |
| Влажность | 90% без конденсата |
Преобразователь частоты ATV61HU30M0 (рисунок 2.13) используется для создания современных систем обогрева, вентиляции и кондиционирования в промышленных и коммерческих зданиях, а так же для регулирования насосных агрегатов, транспортировка и подъем грузов, деревообрабатывающие и текстильные машины, технологическое оборудование и т.д. Преобразователь частоты Altivar 61 используются для трёхфазных асинхронных двигателей мощностью от 0,75кВт до 630кВт, а так же позволяет уменьшить эксплутационные расходы путем оптимизации потребления энергии, значительно повышая комфортность.

Рисунок 2.13 – Преобразователь частоты ATV61HU30M0
Различные встроенные функции позволяют адаптировать преобразователь для использования в электрических установках, сложных управляющих системах и системах диспетчеризации инженерного оборудования здания. В преобразователе так же учитывается необходимость электромагнитной совместимости и уменьшения гармонических составляющих тока. В зависимости от характеристик, каждый тип (UL типа 1/IP 20 или UL типа 12/IP 54) либо имеет встроенные фильтры ЭМС класса А или В и дроссели звена постоянного тока, либо эти элементы доступны в качестве дополнительного оборудования.
2.5 Расчёт механических характеристик асинхронного электродвигателя при законе частотного регулирования.
При определении законов частотного регулирования АД в широком изменении частоты напряжения питания наибольшее применение получила Т-образная схема замещения, поскольку она отражает (в отличие от Г-образной схемы) изменение тока намагничивания (магнитного потока) при изменении частоты и нагрузки двигателя, что соответствует физике процессов в АД. Это особенно необходимо учитывать на низких частотах, когда падение напряжения на сопротивлениях обмотки статора становится соизмеримым с величиной приложенного напряжения. Напомним, что в Г-образной схеме замещения контур намагничивания вынесен на вход и поэтому ток намагничивания не зависит от падения напряжения на обмотке статора. С учетом принятых обозначений на рисунке 2.14 приведена Т-образная схема замещения АД,
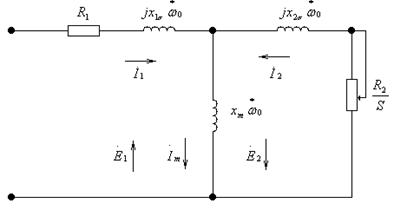
Рисунок 2.14 - Т-образная схема замещения
где  - ток статора;
- ток статора;  - ток ротора, приведенный к статору;
- ток ротора, приведенный к статору;
- ток намагничивания;  Е1 – Э.Д.С. статора;
Е1 – Э.Д.С. статора;
Е2 – Э.Д.С. ротора, приведенная к статору;
Тип электродвигателя – 4А112MА6У3.

КПД,%  (при
(при  75%)
75%)
cosφ,  (при 75%)
(при 75%)
Параметры схемы замещения:
Расчет параметров Т-образной схемы замещения:
Номинальный ток:
 А
А
Базовое сопротивление:
 Ом
Ом
Индуктивное сопротивление намагничивающего контура при номинальной частоте;
 Ом
Ом
Активное сопротивление обмотки статора:
 Ом
Ом
Индуктивное сопротивление рассеяния фазы статора при номинальной частоте;
 Ом
Ом
Активное сопротивление обмотки ротора:
 Ом
Ом
Индуктивное сопротивление рассеяния фазы ротора, приведенное к статору, при номинальной, частоте;
 Ом
Ом
Для построения механических характеристик воспользуемся формулой для построения характеристики n(M), при различных частотах питающей сети.
 , (2.1)
, (2.1)
где,  - число пар полюсов;
- число пар полюсов;
 - напряжение на статоре;
- напряжение на статоре;
 - угловая скорость поля;
- угловая скорость поля;
 - активное сопротивление обмоток статора и ротора;
- активное сопротивление обмоток статора и ротора;
 - коэффициент рассеяния машины;
- коэффициент рассеяния машины;
 - относительная частота напряжения на статоре;
- относительная частота напряжения на статоре;
 - относительная частота роторной ЭДС;
- относительная частота роторной ЭДС;
 - полное индуктивное сопротивление фазы статора и ротора при разомкнутой цепи статора и ротора;
- полное индуктивное сопротивление фазы статора и ротора при разомкнутой цепи статора и ротора;
 - индуктивное сопротивление намагничивающего контура при номинальной частоте;
- индуктивное сопротивление намагничивающего контура при номинальной частоте;
Полное индуктивное сопротивление фазы статора при разомкнутой цепи ротора;
 Ом
Ом
Полное индуктивное сопротивление фазы ротора при разомкнутой цепи статора;
 Ом
Ом
Коэффициент рассеяния машины:

Для построения графиков зависимости момента от частоты вращения при различных частотах питающей сети (рисунок 2.15) воспользуемся таблицами 2.7, 2.8 и 2.9. Значения в таблице получены по формуле 2.1.
Таблица 2.7 - При 

 ; тогда
; тогда  ;
;  ;
;  В
В
 , , 
| 104.6 | 104.6 | 104.6 | 104.6 | 104.6 | 104.6 | 104.6 | 104.6 | 104.6 | 104.6 | 104.6 | 104.6 | 104.6 |
 , ,
| 104.6 | 99.467 | 94.2 | 89 | 83.733 | 73.267 | 62.8 | 52.333 | 41.867 | 31.4 | 20.933 | 10.467 | 0 |

| 
| 0,05 | 0,1 | 0,15 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 |
 , , 
| 0.418 | 35.472 | 59.524 | 74.084 | 82.181 | 86.671 | 83.951 | 78.816 | 73.179 | 67.762 | 62.806 | 58.362 | 54.406 |
Таблица 2.8 - При 
 ; тогда
; тогда  ;
;  ;
;  В
В
 , ,
| 52.333 | 52.333 | 52.333 | 52.333 | 52.333 | 52.333 | 52.333 | 52.333 | 52.333 | 52.333 | 52.333 | 52.333 | 52.333 |
| ,
| 52.333 | 49.72 | 47.1 | 44.487 | 41.867 | 36.633 | 31.4 | 26.167 | 20.933 | 15.7 | 10.467 | 5.233 | 0 |
|
| 2,5*10-4 | 0,025 | 0,05 | 0,075 | 0,1 | 0,15 | 0,2 | 0,25 | 0,3 | 0,35 | 0,4 | 0,45 | 0,5 |
 , ,
| 0.208 | 17.992 | 31.179 | 40.685 | 47.416 | 55.084 | 58.012 | 58.375 | 57.378 | 55.688 | 53.674 | 51.543 | 49.409 |
Таблица 2.9 - При  ; тогда
; тогда  ;
;  ;
;  В
В
 , ,
| 10.467 | 10.467 | 10.467 | 10.467 | 10.467 | 10.467 | 10.467 | 10.467 | 10.467 | 10.467 | 10.467 | 10.467 |
| ,
| 10.467 | 9.947 | 9.42 | 8.9 | 7.327 | 6.28 | 5.233 | 4.187 | 3.14 | 2.093 | 1.167 | 0 |
|
| 5,1*10-5 | 5*10-3 | 0,01 | 0,015 | 0,03 | 0,04 | 0,05 | 0,06 | 0,07 | 0,08 | 0,089 | 0,1 |
| ,
| 0.035 | 3.118 | 5.583 | 7.497 | 11.113 | 12.35 | 13.034 | 13.361 | 13.452 | 13.391 | 13.252 | 13.005 |
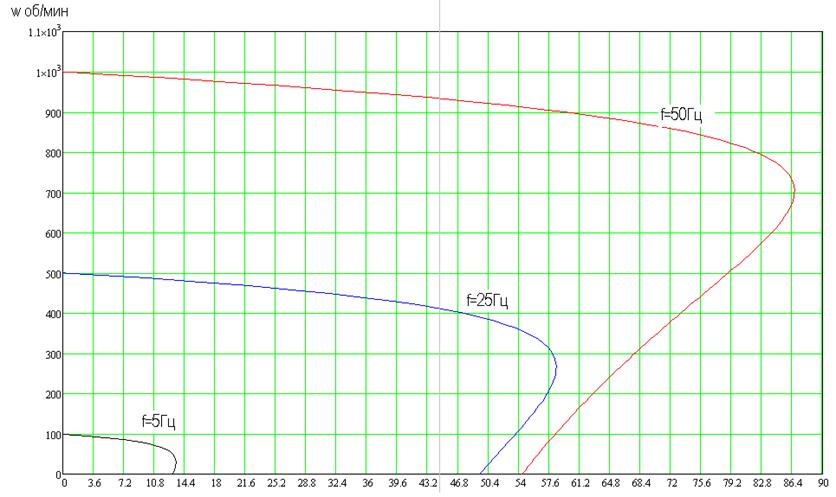
Рисунок 2.15 – Графики механических характеристик при законе частотного регулирования 
Дата: 2018-11-18, просмотров: 736.