Магнитные свойства ферромагнитных материалов как правило оценивают зависимостью
 ,
,
получая гистерезисные характеристики. Но нам уже известно, что
 ,
,
а
 .
.
Приведенные выражения наглядно показывают прямую пропорциональную зависимость Н от I, а В от U. Это позволяет применять к исследованию магнитопроводов вольт-амперные характеристики.
 .
.
Такие характеристики полезны при расчете цепей из нескольких элементов. Общий вид зависимости  для магнитопровода приведен на рис. 9.1. Как и кривая начальной намагниченности, вольт-амперная характеристика имеет начальный участок (оа), линейный (аб), колено (бв) и насыщенная (в,г).
для магнитопровода приведен на рис. 9.1. Как и кривая начальной намагниченности, вольт-амперная характеристика имеет начальный участок (оа), линейный (аб), колено (бв) и насыщенная (в,г).
Вольт-амперные характеристики применяются для определения физики работы ферромагнитных стабилизаторов.
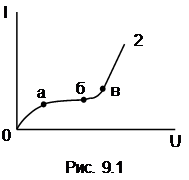 | 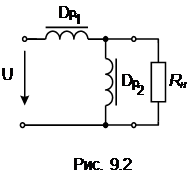 |  | |||
Упрощенная схема ферромагнитного стабилизатора включает в свой состав два разомкнутых магнитопровода (дросселя) Др1 и Др2 . Дроссель Др1 работает в линейном режиме. Он выполняет роль ограничителя максимального тока. Дроссель Др2 работатет в режиме насыщения. Их вольт-амперные характеристики приведены на рис. 9.3. Здесь же приведена результирующая характеристика  .
.
Напряжение на нагрузке определяется падением напряжения на дросселе Др2 . Графики рис. 9,3. показывают, что если на входе цепи, действует напряжение Uоа , то нагрузка находится под напряжением  . Часть входного напряжения падает на сопротивлениии дросселя Др1 - Uоа". Пусть входное напряжение дросселя Др1 - Uоа". Пусть входное напряжение увеличилось на величину аб. Это вызывает увеличение напряжения на нагрузке на величину а'б'. Наглядно видно, что а'б' в несколько раз меньше участка аб. Реально стабилизаторы ослабляют колебания входного напряжения в 5¸10 раз.
. Часть входного напряжения падает на сопротивлениии дросселя Др1 - Uоа". Пусть входное напряжение дросселя Др1 - Uоа". Пусть входное напряжение увеличилось на величину аб. Это вызывает увеличение напряжения на нагрузке на величину а'б'. Наглядно видно, что а'б' в несколько раз меньше участка аб. Реально стабилизаторы ослабляют колебания входного напряжения в 5¸10 раз.
Таким образом дроссель, включенный параллельно нагрузке и работающий в режиме насыщения способен сглаживать броски напряжения на входе цепи.
Принцип работы электромагнитных механизмов.
Электромагнитные реле.
В состав автоматизированных, полуавтоматизированных и ручных систем уаправления электроэнергетическими установками, электроприводами, технологическими установками и т.п. входят электромагнитные устройства (контакторы, пускатели, реле, электромагниты). С помощью этих устройств производится регулирование токов и напряжений генераторов. Они выполняют функции контроля и защиты установок, потребляющих электроэнергию. Основными частями электромагнитных устройств являются электромагнитные механизмы: электрические контакты, механический или электромагнитный привод контактной группы, кнопки управления.
По назначению различают следующие электромагнитные устройства:
-коммутационные (разъединители, выключатели, переключатели);
-защитные (предохранители, реле защиты);
-пускорегулирующие (контакторы, пускатели, реле управления);
-контролирующие и регулирующие (датчики, реле);
-электромагниты.
Рассмотрим принцип работы электромагнитного механизма. В электромагнитном механизме осуществляется преобразование электрической энергии источника питания в механическую энергию перемещения якоря. Схема механизма приведена на рис. 9.4. Она включает неподвижную 1 (ярмо) и подвижную 2 (якорь) части магнитопровода; намагничивающую катушку 3, удерживающую 4.
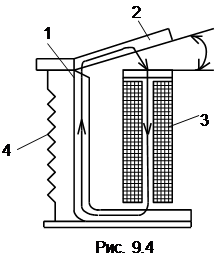
Появление тока в намагничивающей катушке приводит к намагничиванию ферромагнитных частей магнитопровода. Образовавшееся магнитное поле притягивает якорь к ярму.
Проведем анализ процесса преобразования энергии. Пусть к намагничивающей катушке приложено напряжение U, и через нее протекает ток I. На сопротивлении катушки R создается падение напряжения  .
.
Разность U -UR урановешивает э.д.с. еL, т.е.
 (9.7)
(9.7)
Тогда
 (9.8)
(9.8)
Умножим (9.8) на  и проинтегрируем за время намагничивания. Тогда
и проинтегрируем за время намагничивания. Тогда
 или
или
 ,
,
где WП - энергия, затрачиваемая источником на нагрев катушки за время t/
Решением выражения для WM имеет вид:
 (9.9)
(9.9)
Учитывая, что
 ,
,
а
 ,
,
где S - площадь, а l - воздушного зазора, получим
 .
.
При перемещении якоря совершается работа

где  - энергия магнитного поля в начале намагничивания с длиной воздушного зазора
- энергия магнитного поля в начале намагничивания с длиной воздушного зазора  ;
;
 - энергия магнитного поля с длиной воздушного зазора
- энергия магнитного поля с длиной воздушного зазора  ;
;
 .
.
С учетом (9.10) можем записать

Так как  , то
, то
 ,
,
где
 (9.11)
(9.11)
Выражение (9.11) определяет силу [кГ], с которой магнитное поле действует на якорь. Очевидно, что значение силы зависит от длины зазора  и магнитодвижущей силы
и магнитодвижущей силы  .
.
Если к катушке подключен источник синусоидального напряжения, то и магнитный поток в магнитопроводе и воздушном зазоре изменяется по синусоидальному закону:
 .
.
В этом случае мгновенное значение силы, притягивающий якорь к ярму определяется выражением
 ,
,
где

После преобразования получим
 . (9.12)
. (9.12)
Видно, что тяговая сила содержит переменную и постоянную составляющую. Переменная составляющая имеет частоту, вдвое большую частоты питающего напряжения, и амплитуду, равную постоянной составляющей . Пульсация F(t) вызывает вибрацию якоря (дребезг).
В однофазных электромагнитных механизмах для устранения пульсации на якоре размещают короткозамкнутый (КЗ) виток провода. Переменный магнитный поток Ф(t) наводит в КЗ витке э.д.с. сдвинутую по фазе на 900 относительно ФМ. По витку протекает ток iK, который создает поток ФКМ, совпадающий по фазе с э.д.с.
Теперь на якорь начинает действовать пульсирующая сила с удвоенной частотой, т.е. cos 4wt. В итоге постоянная составляющая силы возрастает, пульсация уменьшается.
Электромагнитное реле - это устройство, в котором при достижении определенного значения входной величины выходная величина изменяется скачком. Выходные контакты реле замыкаются или размыкаются. Реле применяют в цепях управления с током не более 1А. Входной или управляющей величиной реле могут быть электрические, механические, тепловые и др. воздействия.
На рис. 9.5. показано устройство простейшего электромагнитного реле клапанного типа. При определенной магнитодвижущей силе (МДС) в цепи управления возникающая сила F притяжения якоря З к ярму 1 превышает силу противодействующей пружины 2. Воздушный зазор уменьшается. Клапан 4 нажимает на подвижный контакт 5 и прижимает его с силой F к неподвижному контакту 6. Управляемая цепь замыкается. Исполнительный элемент 7 производит требуемое действие.
Контакты реле в исходном положении могут быть как разомкнуты, так и замкнуты. В последнем случае при срабатывании реле они размыкаются. Действие каких-либо устройств прекращается. Многие реле имеют несколько контактных пар. Тогда их используют для управления несколькими электрическими цепями.
Функции реле связаны с контролем режима работы важных элементов электрической цепи: генераторов, трансформаторов, линий передач, электродвигателей и т.п.
При нарушении нормального режима соответствующее реле приводит в действие аппаратуру, которая либо восстанавливает нормальный режим работы, либо отключает поврежденный участок. Такие реле называют "реле защиты". Они "наблюдают" за током в цепи (токовая защита), за напряжением на отдельных участках (защита по напряжению), за изменением мощности, частоты тока и т.д.
В зависимости от значения или направления входной величины различают реле максимального, минимального или направленного действия.
В зависимости от времени срабатывания различают реле быстродействующие  ), нормальные
), нормальные  ) и с выдержкой времени ( реле времени).
) и с выдержкой времени ( реле времени).
Реле, не реагирующее на направление управляющей величины (например, тока), называют нейтральным. Реле, чувствительные к полярности управляющей величины, называют поляризованными.
Если исполнительный элемент реле (подвижные контакты) непосредственно воздействует на цепь управления, то это реле прямого действия. Когда воздействие осуществляется через другие аппараты - реле косвенного действия.
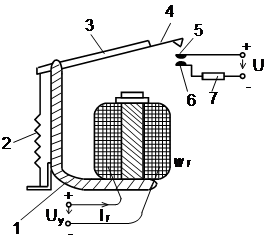 |
Рис. 9.5
Лекция 10. Трансформаторы
Дата: 2018-11-18, просмотров: 727.