Для определения оценки качества и точности полученной скорректированной системы, воспользуемся средствами пакета MATLAB. Определим частотную и переходную характеристику скорректированной системы. Составим модель системы с помощью приложения SIMULINK пакета MATLAB.
Определение точности и расчет переходных процессов в скорректированной системе
Для определения точности и расчета переходных процессов скорректированной системы необходимо вычислить ПФ разомкнутой системы.
WCK(s) = W(s)*WK(s);

Определяем ошибку скорректированной системы:
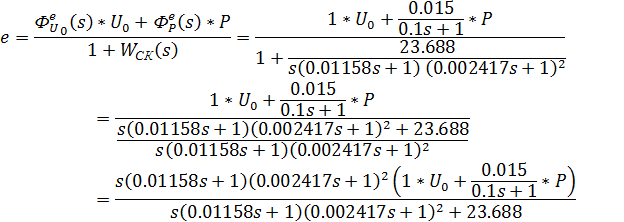
Чтобы найти установившуюся ошибку необходимо в уравнение подставить S=0, тогда:
 .
.
Для определения фазовой и переходной характеристик, используем пакет MATLAB. Заносим WCK(s) в MATLAB:
>> Wck=W*Wk
Zero/pole/gain:
350160000.4591 (s+10)
------------------------------
s (s+86.36) (s+413.7)^2 (s+10)
После сокращения:

Определим фазовую частотную характеристику скорректированной системы (рис. 15):
>> margin(Wck);grid on
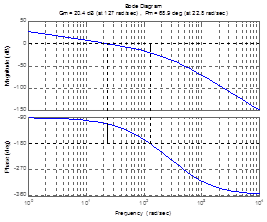
Рис. 15
Запас устойчивости по фазе 68.90, ΔL = 20.4 Дб, что удовлетворяет условиям.
Находим ПФ замкнутой скорректированной системы:
>> Fck=feedback(Wck,1)
Zero/pole/gain:
350160000.4591 (s+10)
------------------------------------------------------
(s+10) (s^2 + 73.41s + 1956) (s^2 + 840.4s + 1.79e005)
Рассмотрим переходный процесс замкнутой скорректированной системы (рис. 16).
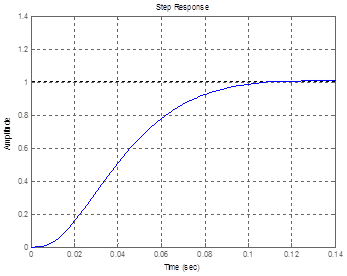
Рис. 16
Построение и описание функциональной схемы скорректированной системы.
Изобразим функциональную схему (рис. 17) с учетом регулятора, предварительно описав параметры корректирующего устройства. Параметры регулятора приведены в таблице 2.
Таблица 2.
| Тип регулятора | С1 мкФ | С2 мкФ | R1 кОм | R2 кОм | Коэффициент усиления усилителя |
| Пассивная коррекция | 0.1 | -- | 1 | 0.02476 | 0.02416 |
| Активная коррекция | 0.1 | 0.0017 | 1 | 1.41 | 1.41 |
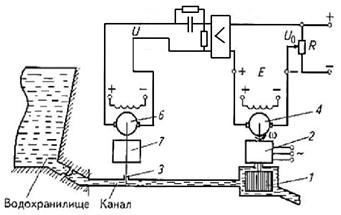
Рис. 17 Функциональная схема с учетом корректирующего устройства.
Скорректированная система обладает следующими характеристиками:
- Перерегулирование s = 0%;
- Время переходного процесса tПЕР = 0.14с;
- Запас устойчивости по фазе 68.90;
- Запас устойчивости по амплитуде ΔL = 20.4 Дб.
Библиографический список используемой литературы
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления – Изд. 4-е, перераб. и доп. – СПб, Изд-во "Профессия", 2003
2. Ерофеев А.А. Теория автоматического управления: Учебник для втузов. – 2-е изд., перераб. и доп. – СПб.: Политехника, 2003. – 302 с.: ил.
3. Синтез следящей системы автоматического управления: Метод. указания к курсовой работе. Сост. В.И. Будин, О.Б. Сигова, – Самара, СамГТУ, 2003. – 20 с.
4. Медведев В.С., Потемкин В.Т. Control System Toolbox. MATLAB 5 для студентов. – М.: ДИАЛОГ – МИФИ, 1999. – 287 с.
5. Лазарев Ю.Ф. MatLab 5. x. – К.: Издательская группа BHV, 2000. – 384 с.
6. Дьяконов В.П. Simulink 4. Специальный справочник. – СПб: Питер, 2002. – 528 с.: ил.
Дата: 2019-12-10, просмотров: 358.