Через частоту среза проходит прямая -20 Дб/дек. Это является обязательным условием для получения качественной системы. Из-за широкой среднечастотной части, перерегулирование будет малым.
Частота среза  находится графически. Отмечаем полученные точки на горизонтальной оси желаемой ЛАЧХ, проводим требуемые наклоны и получаем среднечастотную часть.
находится графически. Отмечаем полученные точки на горизонтальной оси желаемой ЛАЧХ, проводим требуемые наклоны и получаем среднечастотную часть.
Высокочастотная часть желаемой ЛАЧХ имеет произвольный вид, т.к. она практически не влияет на качество САУ. Однако, для упрощения корректирующего устройства, необходимо стремиться к тому, что бы она совпадала по наклону с исходной ЛАЧХ в указанной области частот. При этом требуется, чтобы высокочастотная часть желаемой ЛАЧХ не заходила в запретную зону, образованную прямой с нулевым наклоном 0 Дб/дек.
По полученным точкам достраиваем высокочастотную часть желаемой ЛАЧХ и получаем желаемую логарифмическую амплитудную характеристику (рис. 3,  ).
).
По виду получаемой желаемой ЛАЧХ записываем ПФ:

 .
.
Для того, чтобы правильно записать коэффициент в приведенной ПФ, осуществим переход от логарифмов:
 ;
;  ;
;


Подставляем полученные коэффициенты в выражение для  и получаем:
и получаем:

Определяем желаемую фазовую частотную характеристику. А также переходный процесс и показатели качества желаемой системы. Для этого занесем полученную ПФ  в MATLAB в zpk-форме:
в MATLAB в zpk-форме:
>> Wzh=zpk ([],[0,-86.36,-413.74,-413.74],16.8/(0.01158*0.002417*0.002417))
Zero/pole/gain:
248340425.8576
-----------------------
s (s+86.36) (s+413.7)^2

Определяем желаемую фазовую частотную характеристику (рис.9):
>> margin(Wzh);grid on
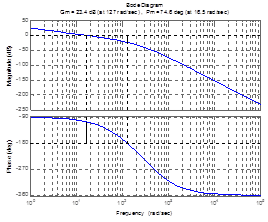
Рис.9
Запас устойчивости по фазе данной системы Δφ = 74.60, запас по амплитуде ΔL = 23.4 Дб. Данная система устойчива.
Находим ПФ замкнутой системы:
>> Fzh=feedback(Wzh,1)
Zero/pole/gain:
248340425.8576
---------------------------------------------
(s+47.2) (s+29.76) (s^2 + 836.9s + 1.768e005)

Переходная характеристика желаемой системы представлена на рис. 10.
>> step(Fzh);grid on
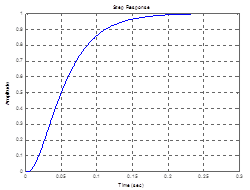
Рис.10
Время переходного процесса составляет 0,3 с. Оно характеризует быстродействие системы. Перерегулирование равно 0% - не превышает заданного 25%.
Исходя из вышеперечисленного можно сделать вывод, что система устойчива, так как переходный процесс является сходящимся. Таким образом, желаемая система автоматического управления удовлетворяет установленным к ней требованиям по быстродействию, перерегулированию и запасом устойчивости.
4. Синтез последовательного корректирующего устройства (регулятора)
Структурная схема САУ при последовательной коррекции изображена на рис. 11, где приняты следующие обозначения:  - передаточная функция исходной системы;
- передаточная функция исходной системы;  - ПФ корректирующего устройства.
- ПФ корректирующего устройства.
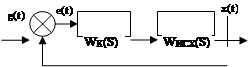 |
Рис. 11. Структурная схема системы при последовательной коррекции.
Полагая, что ПФ скорректированной системы  :
:

Переходя к логарифмическим характеристикам, после преобразований, получим:

Таким образом, графически вычитая  из
из  и учитывая точки излома, получим ЛАЧХ корректирующего устройства (рис. 4,
и учитывая точки излома, получим ЛАЧХ корректирующего устройства (рис. 4,  ).
).
По форме  записываем ПФ корректирующего устройства :
записываем ПФ корректирующего устройства :
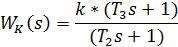
Коэффициент передачи корректирующего устройства определяется:
20lg K = 3;
Подставив значения времени и коэффициента передачи в полученную ПФ корректирующего устройства:
Существует три способа реализации:
1. Последовательная коррекция с помощью пассивных корректирующих звеньев;
2. Коррекция на основе активных фильтров (операционных фильтров);
3. Дискретная коррекция.
Дата: 2019-12-10, просмотров: 436.