Для построения ЛАЧХ исходной системы, используем ПФ разомкнутой системы, полученную в предыдущем пункте:

Основным достоинством логарифмических амплитудных частотных характеристик является возможность построения без применения вычислительной работы. Особенно когда ПФ может быть представлена в виде произведения сомножителей. Тогда результирующая ЛАЧХ может быть приближенно построена в виде асимптотической ЛАЧХ, представляющей собой совокупность отрезков прямых линий с наклоном [20 дБ/дек].
Определим точки излома и пересечения с осями логарифмической координатной сетки нашей ПФ.
Для построения ЛАЧХ находится величина:

Определяем L(ω) при ω = 0;
L(ω)=20lgK=20lg16.8=20*1.225=24.5062
Постоянные времени:



Находим точки излома исходной ЛАЧХ:



Используя полученные значения, строим ЛАЧХ исходной системы (рис. 4, Lисх).
Используем средства математического пакета MATLAB, в частности, приложением Control System Toolbox, для определения устойчивости и частотных характеристик исходной системы.
Занесем ПФ разомкнутой системы в MATLAB, обозначив ее через W.
W=zpk([],[0,-86.36,-413.74,-10],16.8/(0.01158*0.002417*0.1))
Zero/pole/gain:
6002388.093
----------------------------
s (s+86.36) (s+413.7) (s+10)
Строим фазовую частотную характеристику (рис. 5), которую используют для определения фазового сдвига между входными и выходными колебаниями. Используем функцию margin.
>> margin(W); grid on
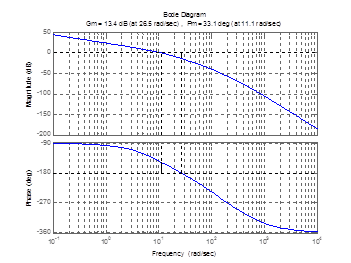
Рис. 5
Для определения запаса устойчивости определяют две величины: запас устойчивости по фазе Δφ и запас устойчивости по амплитуде ΔL.
Запас устойчивости по фазе определяется величиной Δφ, на которую должно возрасти запаздывание по фазе в системе на частоте среза  , чтобы система оказалась на границе устойчивости.
, чтобы система оказалась на границе устойчивости.
Запас устойчивости по амплитуде определяется величиной ΔL допустимого подъема л.а.х., при котором система окажется на границе устойчивости.
По рис. 5 определим запас устойчивости по фазе и амплитуде. В нашем случае запас по фазе Δφ = 33.1, запас по амплитуде ΔL = 13.4 Дб. Данные параметры системы являются неудовлетворительными и не соответствуют рекомендуемым значениям Δφ = 40÷600, следовательно система неустойчива.
Воспользуемся критерием Найквиста для определения устойчивости разомкнутой системы автоматического управления. Для этого построим годограф Найквиста от разомкнутой системы с помощью средств MATLAB (рис. 6). Используем функцию nyquist.
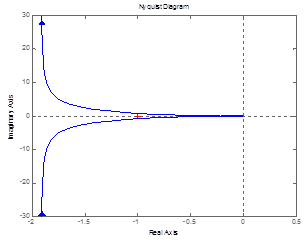
Рис.6
Увеличим область в начале координат.
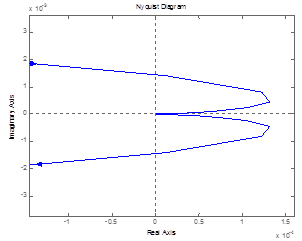
Рис.7
Точка с координатой (0;-j) охватывает годограф, следовательно, исходная система неустойчива.
Для определения переходного процесса найдем ПФ замкнутой исходной системы, обозначив ее через F. Для этого используем команду feedback.
>> F=feedback(W,1)
Zero/pole/gain:
6002388.093
-----------------------------------------
(s+413.6) (s+88.99) (s^2 + 7.48s + 163.1)
Для определения времени, через которое наступит установившийся режим после подачи единичного ступенчатого воздействия строим переходную характеристику замкнутой системы, которая представлена рис. 8. При ее построении в MATLAB использовали функцию step.
>> step(F)
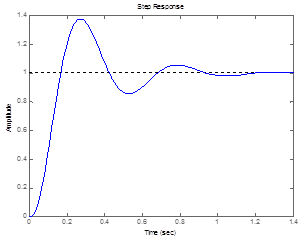
Рис. 8
Из рисунка видно, что процесс является сходящимся, (гармонические колебания затухают), а значит переходный процесс замкнутой системы устойчивый. Время переходного процесса 1,4 с.
Делая вывод из всего вышеперечисленного можно сказать, что система имеет характеристики не удовлетворяющие заданным параметрам. Для их улучшения необходимо в состав системы ввести дополнительно корректирующее звено (регулятор). Для этого, необходимо построить ЛАЧХ желаемой системы, с помощью которой получить ПФ корректирующего звена. Далее исследуем ПФ желаемой системы на критерий качества и реализуем корректирующее звено.
Дата: 2019-12-10, просмотров: 468.