ВВЕДЕНИЕ
Среди транспортирующих машин вообще, и с тяговым органом в частности наиболее распространены ленточные конвейеры. Это обусловлено их преимуществами: высокой производительностью, простотой конструкции, небольшим расходом энергии, надежностью, возможностью транспортирования груза на большие расстояния с большой скоростью, использованием для перемещения как штучных, так и сыпучих грузов и др.
Принцип действия ленточных конвейеров основан на сцеплении ленты с приводным (ведущим) барабаном, что обеспечивает ей движение, а тем самым и перемещение груза, находящегося на рабочей ветви ленты.
Исходные данные к работе:
производительность Q = 25 т/час
длина транспортёра L = 8 м
высота Н = 2,5 м
груз – Песок сухой
ФИЗИКО-МЕХАНИЧЕСКИЕ СВОЙСТВА ГРУЗА
Принимаем схему ленточного транспортёра
5
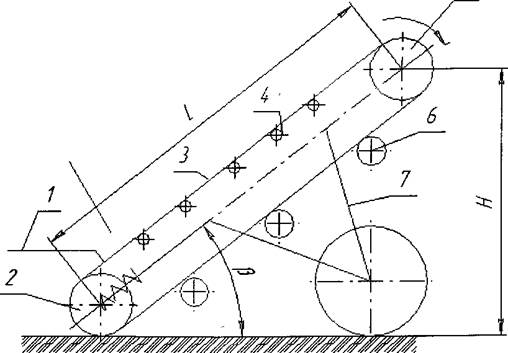
Рис 1.1 Схема ленточного транспортера
1 - загрузочное устройство; 2 - натяжной барабан; 3 – лента; 4 - роликоопора рабочей ветви; 5 - ведущий барабан; 6 - роликоопора холостой верви; 7 - механизм передвижения.
Насыпная плотность  коэффициент трения покоя
коэффициент трения покоя  таблица1.1[1]
таблица1.1[1]
Угол естественного откоса в покое  таблица 1.1 [1]
таблица 1.1 [1]
Угол естественного откоса в движении  таблица 1.1 [1]
таблица 1.1 [1]
Условие не сползания груза
Работа ленточного конвейера с гладкой лентой возможна при условии, что угол трения груза по ленте не меньше угла наклона рабочей ветви к горизонтали.

где  -максимальный угол наклона транспортёра
-максимальный угол наклона транспортёра
 - коэффициент трения движения
- коэффициент трения движения
 (1.2)
(1.2)

 (1.3)
(1.3)


0,31<0,37
Условие выполняется.
ВЫБОР ЛЕНТЫ
Ширина ленты
Лента представляет собой основную часть ленточного конвейера, являясь как тяговым, так и несущим органом, лента должна обладать высокими: прочностью, эластичностью и износостойкостью, хорошей сопротивляемостью расслаиванию при многократных перегибах, малой гигроскопичностью, стойкостью к физико-химическому воздействию грузов и окружающей среды.
В сельскохозяйственном производстве наиболее распространены резинотканевые ленты (по ГОСТ 20—85), состоящие из нескольких провулканизированных прокладок. Для транспортирования крупнокусковых и других специфических грузов применяют резинотросовые ленты, стальные тросы которые завулканизированы в резину.
Требуемая ширина конвейерной ленты:
 (2.1)
(2.1)
V- скорость ленты ,V = 1,5 м/с таблица 2.8 [1]
насыпная плотность таблица 1.1 [1]
Принимаем В = 200 мм,[1.стр.15].
Конструкция ленты
Выбираем конвейерную ленту Лента 4-200-3-БКНЛ-100-3-2-С-ГОСТ 20-76
общего назначения, типа 4, шириной В=200 мм с тремя тяговыми прокладками из ткани БКНЛ-100 таблица 2.2 [1]
БКНЛ- бельтинг из комбинированных нитей с лавсаном. Прочность
нитей на разрыв  с толщиной резиновой обкладки класса С, с толщиной рабочей поверхности
с толщиной резиновой обкладки класса С, с толщиной рабочей поверхности  , нерабочей поверхности
, нерабочей поверхности  таблицы 2.1; 2.2; 2.3; 2.4 [1]
таблицы 2.1; 2.2; 2.3; 2.4 [1]
Погонная масса ленты
 (2.3)
(2.3)

ρ-плотность ленты ρ=1100 кг/м3 [1,стр. 14]
БАРАБАНЫ И РОЛИКООПОРЫ
Барабаны ленточных конвейеров выбирают в зависимости от числа прокладок и типа ленты.
Диаметр приводного барабана.
Dб=k·z (3.1)
k-коэффициент зависящий от типа ленты таблица 2.9[1]
z- число прокладок
Dб=140·3=420мм;
Принимаем Dб=500мм;[1.стр.17]
Диаметры концевых и натяжных барабанов принимают:
Dн=0.8 Dб (3.2)
Dн=0.8·500=400мм;
Принимаем Dн=400мм; [1.стр.17]
Отклоняющего барабана.
Dо=0.55 Dб (3.3)
Dо=0.55 ·500=275мм;
Принимаем Dо=320мм;
Длина барабанов:
Lб=B+100 (3.4)
Lб=200+100=300мм;
Для транспортирования грузов применяются роликоопоры:
Тип роликоопоры выбирается по таблице 2.10[1]
Верхняя (рабочая)- верхняя прямая П ГОСТ 22645-77
Нижняя (обратная)- нижняя прямая Н ГОСТ 22645-77
Диаметр роликоопоры выбирается по таблице 2.11[1]
Диаметр роликоопоры принимаем 63 мм
Длина роликоопоры.
Lр=B+100 (3.5)
Lр=200+100=300мм;
Расстояние между роликоопорами:
На рабочей ветви lр=1400мм; таблица 2.12[1]
В зоне загрузки
lр.з=0.5 lр (3.6)
lр.з=0.5 ·1400=700 мм;
На незагруженной ветви
lр1=2· lр (3.7)
lр1=2·1400=2800 мм;
Погонная масса роликаопор принимается по таблице 2.13[1]
Рабочей  Холостой
Холостой 
Роликаопора П-20-63-20 ГОСТ 22645-77
ВЫБОР ДВИГАТЕЛЯ
 (5.1)
(5.1)
С0- коэффициент запаса С0=1.2 [1]
η-общий КПД привода η= 0.85 [2]
 кВт
кВт
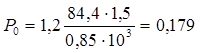
Принимаем двигатель общепромышленный серии 4А:
Марка 4А63А6У3
Рис 5.1 Эскиз двигателя.
Принимаем электродвигатель: 4А63A6У3 [2 cтр. 226]
Мощность Р = 0,18 кВт;
Номинальная частота вращения nном = 885 мин -1
Синхронная частота вращения n = 1000 мин -1
Момент инерции ротора J = 69,4·10-4.
Таблица1.1.Парамеры двигателя.
| Марка двигателя | Мощность,кВт | Частота вращения,мин-1 | КПД,% | cosφ | Tп/Tн | Tmax/Tн | Маховый момент,кгм2 |
| 4А63A6У3 | 0,18 | 885 | 56 | 0,62 | 2,2 | 2,2 | 69,4·10-4 |
ВЫБОР РЕДУКТОРА
Частота вращения барабана:
 (6.1)
(6.1)
 (об/мин)
(об/мин)
Передаточное число:  (6.2)
(6.2)
 (6.3)
(6.3)
Выбираем редуктор Ц2С-63 у которого U=8 [2 стр. 238].
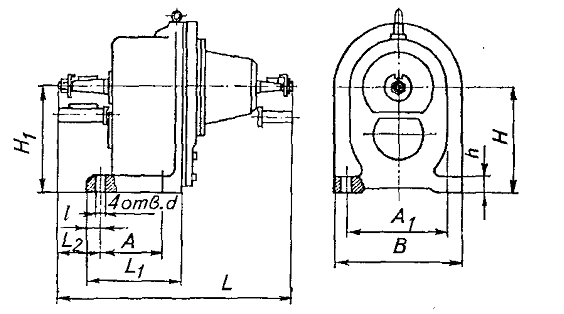
Рис 6.1 Эскиз редуктора.
|
|
Отверстие для фундаментальных болтов число = 4;
d1 = 18 мм; d2 = 20 мм; m = 17,5 кг.
Таблица1.2.Парамеры редуктора.
| Марка редуктора | L | Lt | L2 | A | A1 | B | H | H1 | l | h | d |
| Ц2С-63 | 360 | 160 | 48 | 110 | 150 | 185 | 270 | 140 | 15 | 16 | 12 |
ВЫБОР МУФТЫ
Для соединения отдельных узлов и механизмов в единую кинематическую цепь используются муфты, различные типы которых могут также обеспечивать компенсацию смещения соединяемых валов (осевых, радиальных, угловых и комбинированных), улучшение динамических характеристик привода, ограничение передаваемого момента, включение и отключение отдельных частей привода.
Наиболее распространенные муфты стандартизованы или нормализованы. Выбор муфт производится в зависимости от диаметра вала и передаваемого момента;
 (7.1)
(7.1)
где Тном - номинальный длительно действующий момент
k – коэффициент режима работы, k = 1,5…2
k – коэффициент режима работы, k = 1,5…2
 (7.2)
(7.2)
Где Р – мощность электродвигателя, Р = 0,18 кВт;
ω – угловая скорость вала электродвигателя
 (7.3)
(7.3)
Где nд – частота вращения вала электродвигателя, nд = 885 мин -1
 с -1
с -1
 Н.м
Н.м
 ≤ 15 Н.м
≤ 15 Н.м
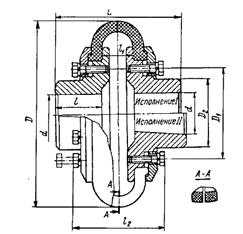
Рис 7.1 Эскиз муфты с торообразным резинокордным элементом
Техническая характеристика муфты:
Т – 15 Нм, dв1 – 19 мм, l – 28 мм,
ω – 35 м / с, dв2 – 12 мм, L – 164 мм.
D – 104 мм, m-1,0 кг.
ТЯГОВЫЙ РАСЧЕТ
Проверка ленты на прочность
Для гибких тяговых органов усилия натяжения в характерных точках определяется по 2-м зависимостям с учётом формулы Эйлера.
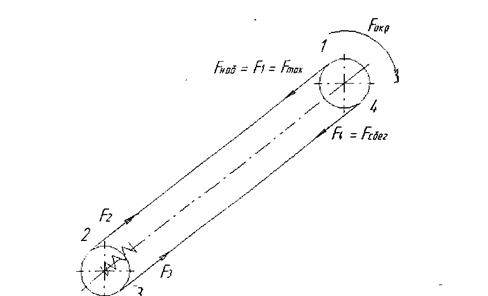
Рис. 8.1 Силы натяжения
где f- коэффициент трения ленты о барабан, f=0,2.. .0,3. Принимаем f=0,25.
а - угол обхвата лентой барабана, рад
С учётом 4.1 получаем:
 (8.1)
(8.1)
К=1.1 [1]
α-угол обхвата ведущего барабана, град;
f-коэффициент сцепления между лентой и барабаном таблица 2.15 [1]
e=2.7 [1]
 (Н)
(Н)
F2=F1-W1-W2 (8.2)
F2=235,8 – 14,6 – 188,6=30,4(Н)
 (8.3)
(8.3)
 (Н)
(Н)
F4=Fсб=F3-W3 (8.4)
F4=27,6-(-126,45)=154(Н)
Проверка ленты на прочность:
 (8.5)
(8.5)
Кр- максимальная допустимая рабочая нагрузка прокладок Кр=16 таблица 2.16 [1]
 - количество прокладок в ленте =3
- количество прокладок в ленте =3
Расчёт натяжного устройства
 (8.7)
(8.7)
Диаметр винта, мм
 (8.8)
(8.8)
Для Стали 3  [3].
[3].
Принимаем d1=12 мм
Ход винта
S=0,025·L+0,3 (8.10)
L-длина транспортера.
S=0,025·8+0,3 =0,5 м.
РАСЧЕТ ЦЕПНОЙ ПЕРЕДАЧИ
В приводах общего назначения, разрабатываемых в курсовых проектах, цепные передачи применяют в основном для понижения частоты вращения приводного вала. Наиболее распространены для этой цели приводные роликовые цепи однорядные (ПР) и двухрядные (2ПР).
В данном курсовом проекте следует разработать цепную передачу со следующими параметрами:
P2=170Вт
Т2 = 14,65Н×м;
n2 = 110,6 об/мин;
n3 = 58,2 об/мин;
U = 2;
Цепь типа ПР
Определяю мощности, угловую скорость, частоту вращения и крутящий момент привода механизма:
P1=Pдв·ηм=0,18·0,98=0,176 кВт;
P2=P1·ηр=0,176·0,98=0,17 кВт;
n1=885;
n2=n1/Uр=885/8=110,6 мин-1;
n3=n2/Uц.п=110,6/1,9=58,2 мин-1;
ω1=π· n1/30=3,14·885/30=92,6 с-1;
ω2=π· n2/30=3,14·110,6/30=11,6 с-1;
ω3=π· n3/30=3,14·58,2/30=6,1 с-1;
Т1= P1/ ω1=180/92,6=1,9 Н·м;
Т2= P2/ ω2=170/11,6=14,65 Н·м;
Определяем шаг цепи:
 , (9.1)
, (9.1)
где z1 – число зубьев меньшей звездочки;
[p] – допускаемое давление, приходящееся на единицу опорной поверхности шарнира, принимаем ориентировочно [p] = 22МПа, [4, табл. 7.18];
m – число рядов цепи, m = 1;
Кэ – коэффициент, учитывающий условия монтажа и эксплуатации цепной передачи.
Определяем число зубьев меньшей звездочки
 . (9.2)
. (9.2)

Принимаем z1 = 27.
Определяем коэффициент Кэ
 , (9.3)
, (9.3)
где  – динамический коэффициент, kд = 1 [4, стр. 149];
– динамический коэффициент, kд = 1 [4, стр. 149];
ka – коэффициент, учитывающий влияние межосевого расстояния, ka = 1 [4, стр. 150];
kн – коэффициент, учитывающий влияние наклона цепи, kн = 1,0 [4,стр 150];
kр – коэффициент, учитывающий способ регулирования натяжения цепи, kр =1,25 [4, стр. 150];
kсм – коэффициент, учитывающий способ смазки цепи, kсм = 1,4 [4];
kп – коэффициент, учитывающий периодичность работы, kп = 1,25 [4, стр.150].
 .
.
 мм.
мм.
Принимаем t = 12,7мм [4, табл. 7.18].
Проверяем цепь по допустимой частоте вращения:
 об/мин
об/мин 
 об/мин [4, табл. 7.17].
об/мин [4, табл. 7.17].
Проверяем цепь по давлению в шарнире.
Определяем допускаемое давление в шарнире
 (9.4)
(9.4)
 МПа.
МПа.
Определяем расчетное давление в шарнире цепи:
 , (9.5)
, (9.5)
где Ft – окружная сила;
Аоп – проекция опорной поверхности шарнира, Аоп =39,6 мм2,
[ 4, табл. 7.16].
Определяем окружную силу:
 , (9.6)
, (9.6)
где v – окружная скорость шарнира цепи.
Определяем окружную скорость шарнира цепи:
 м/с.
м/с.
 Н.
Н.
 МПа
МПа  МПа.
МПа.
Определяем число звеньев цепи:
 , (9.7)
, (9.7)
где  ;
;
 ;
;
 .
.
Определяем число зубьев ведомой звездочки:
 (9.8)
(9.8)
Принимаем z2 = 54.
 .
.
 .
.
 .
.
Принимаем Lt = 122.
Уточняем межосевое расстояние:
 (9.9)
(9.9)

Для свободного провисания цепи необходимо предусмотреть возможность уменьшения межосевого расстояния на 0,4%
 (9.10)
(9.10)
 мм
мм
Определяем диаметры делительных окружностей звездочек:
 (9.11)
(9.11)
 мм,
мм,
 (9.12)
(9.12)
 мм.
мм.
Определяем наружные диаметры звездочек:
 , (9.13)
, (9.13)
 , (9.14)
, (9.14)
где d – диаметр ролика цепи, d = 4,45 мм, [4, табл. 7.16].
 мм,
мм,
 мм.
мм.
Определяем силы, действующие на цепь:
Ft = 269,8 Н;
 , (9.15)
, (9.15)
где q – вес 1 м цепи, q = 1,4 кг/м, [4, табл. 7.16].
 Н.
Н.
 , (9.16)
, (9.16)
где kf – коэффициент, учитывающий расположение цепи, kf = 1,5 [4]
 Н.
Н.
Определяем нагрузку на вал от цепной передачи:
 (9.17)
(9.17)
 Н.
Н.
Определяем коэффициент запаса прочности:
 , (9.18)
, (9.18)
где Q – разрушающая нагрузка, Q = 18200 Н, [4, табл. 7.15],
kд – динамический коэффициент, kд = 1, [4, стр. 149].
 [4, табл. 7.19].
[4, табл. 7.19].
Рассчитанное значение коэффициента запаса прочности больше допускаемого, что позволяет считать цепную передачу надежной и долговечной.
РАСЧЁТ ВАЛА ТРАНСПОРТЕРА
В процессе эксплуатации валы испытывают деформации от действия внешних сил, масс самих валов и насаженных на них деталей. Однако в типовых передачах, разрабатываемых в курсовых проектах, массы валов и деталей, насаженных на них, сравнительно невелики, поэтому их влиянием обычно пренебрегают, ограничиваясь анализом и учетом внешних сил, возникающих в процессе работы.
Проектирование вала начинают с определения диаметра выходного конца его из расчета на чистое кручение по пониженному допускаемому напряжению без учета влияния изгиба.
Изображаем вал как балку на двух опорах со всеми действующими силами
Определяем межопорное расстояние:
Lоп = В + 2·х + w (9.1)
Где В – ширина барабана мм;

 х = 8…15 мм; х = 15 мм; [2]
х = 8…15 мм; х = 15 мм; [2]
w = 30…70мм; w = 70мм [2]
Lоп = 300 + 2·15 + 70 = 400 мм.
Определяем диаметр среднего участка вала из расчета на кручение:
 (9.2)
(9.2)
[t]кр – допускаемое напряжение на кручение, [t]кр = 15…20 МПа [4, с 161].
Т3 – крутящий момент на валу элеватора
 (9.3)
(9.3)
Где Р – мощность, Р = 0,18 кВт;
ω – угловая скорость элеватора, ω = 6,1 с -1
 кВт
кВт
 Нм
Нм
 мм
мм
Из стандартного ряда принимаем dв = 11 мм [4, с 161].
Определяем диаметр вала под уплотнение:
dy = dв + (3…5) = 11 + 3 =14 мм;
Определяем диаметр вала под подшипник:
dп = dу + (3…5) = 14 + 5 =19 мм;
Определяем диаметр вала под барабан:
dб = dп + (3…5) = 19 + 5 =24 мм;
Принимаем материал для вала: Марка стали 40Х; диаметр заготовки
dз=24 мм;
твёрдость НВ (не менее) 270; механические характеристики  в=900 МПа,
в=900 МПа,
т=650МПа, -1=410МПа,  -1=230МПа.
-1=230МПа.
Определяем нагрузку на вал:
 (9.4)
(9.4)

Определяем силы реакций в опорах:
f = 50 мм
На ОХ 

 (9.4)
(9.4)
 Н;
Н;


 (9.5)
(9.5)
 Н.
Н.
Проверка: 


Определяем суммарные радиальные реакции опор вала:
 (9.6)
(9.6)
 Н;
Н;
Построение эпюр изгибающих и крутящего моментов в плоскостях ОХ
На ОХ:  Нм.
Нм.
 (9.7)
(9.7)
 Нм
Нм
 (9.8)
(9.8)
 Нм.
Нм.
 Нм;
Нм;
Определяем суммарный изгибающий момент в расчётном сечении:
 (9.9)
(9.9)
 Hм
Hм
Определяем приведенный или эквивалентный момент:
 (9.10)
(9.10)
Где Т – крутящий момент, Т = 26,2 Нм
 Нм.
Нм.
Определяем диаметр вала в рассчитываемом сечении:
 (9.11)
(9.11)
Где  = 50…60 МПа – допускаемое напряжение при изгибе для обеспечения не только прочности, но достаточной жёсткости вала;
= 50…60 МПа – допускаемое напряжение при изгибе для обеспечения не только прочности, но достаточной жёсткости вала;
Принимаем = 60
 мм
мм
Принимаем d = 21 мм.
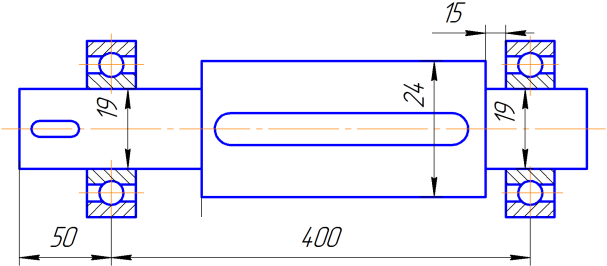
Рис.9.1 Эскиз вала
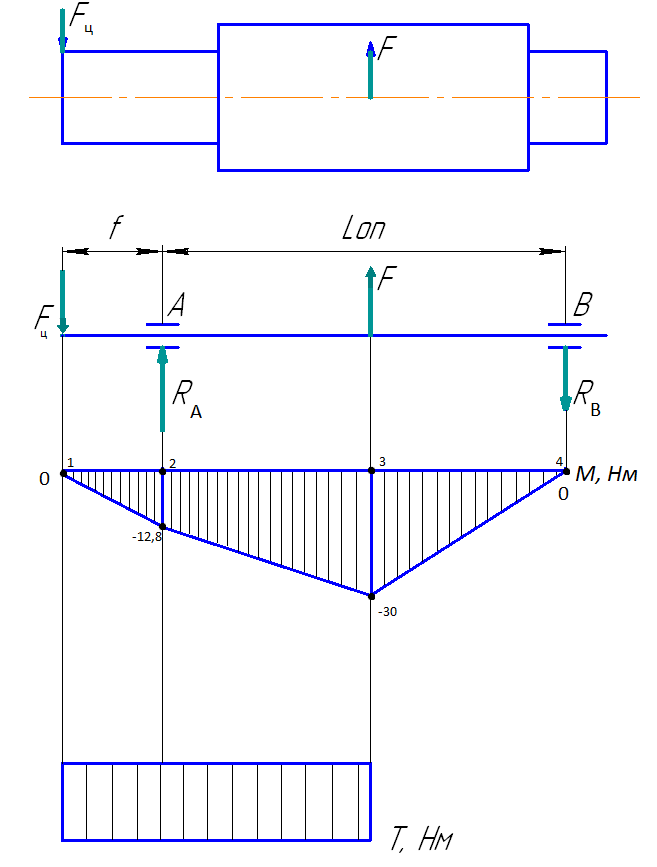
Рис.9.2 Эпюра изгибающих моментов.
ВЫБОР ПОДШИПНИКОВ
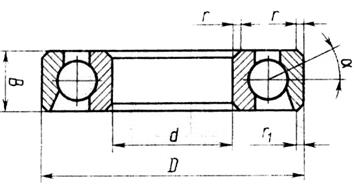
Рис.10.1Подшипник.
Выбираем 2 подшипника по диаметру вала.
Условное обозначение 46205
Средняя серия:
d = 25 мм; С(динамическая грузоподъёмность) = 15700 кН
D = 52 мм; Со(статическая грузоподъёмность) = 8340 кН
В = 15 мм;
r = 1,5 мм.
РАСЧЁТ ШПОНОЧНЫХ СОЕДИНЕНИЙ
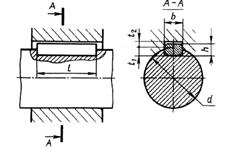
Наиболее распространены призматические шпонки, размеры которых выбирают в зависимости от диаметра. Материал шпонок – сталь 45. Шпоночное соединение проверяют на смятие:
 либо
либо  , (12.1)
, (12.1)
Где  - допускаемое напряжения смятия;
- допускаемое напряжения смятия;
при стальной ступице =100…120 МПа;
Подбираем шпонку под диаметр вала под барабан d=25 мм
вращающий момент на валу, Т3 = 26,2 Н×м;
Сечение шпонки b=8 мм
h=7 мм;
s=0.25…0.4 мм, принимаем s=0.3;
Глубина паза вала t1=4 мм
Длина l=18…90 мм, принимаем l=50 мм.
Шпонка призматическая 8х7х50 ГОСТ 23360-78 [3, стр. 122]
 МПа
МПа
Условие прочности выполняется.
Подбираем шпонку на вал барабана под муфту d=12 мм
вращающий момент на валу, Т1 = 1,9 Н×м;
Сечение шпонки b=5 мм
h=5 мм;
s=0.25…0.4 мм, принимаем s=0.3;
Глубина паза вала t1=3 мм
Длина l=10…56 мм, принимаем l=40 мм.
Шпонка призматическая 5х5х40 ГОСТ 23360-78 [3, стр. 122]
 МПа;
МПа;
Условие прочности выполняется.
ВВЕДЕНИЕ
Среди транспортирующих машин вообще, и с тяговым органом в частности наиболее распространены ленточные конвейеры. Это обусловлено их преимуществами: высокой производительностью, простотой конструкции, небольшим расходом энергии, надежностью, возможностью транспортирования груза на большие расстояния с большой скоростью, использованием для перемещения как штучных, так и сыпучих грузов и др.
Принцип действия ленточных конвейеров основан на сцеплении ленты с приводным (ведущим) барабаном, что обеспечивает ей движение, а тем самым и перемещение груза, находящегося на рабочей ветви ленты.
Исходные данные к работе:
производительность Q = 25 т/час
длина транспортёра L = 8 м
высота Н = 2,5 м
груз – Песок сухой
ФИЗИКО-МЕХАНИЧЕСКИЕ СВОЙСТВА ГРУЗА
Дата: 2019-12-22, просмотров: 375.