2.1. КЛАССИФИКАЦИЯ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Устройства этой группы Государственной системы приборов (TCfl) должны реагировать на изменения контролируемого параметра и выдавать на выходе унифицированный сигнал. Преобразователи, входящие в эту группу в соответствии с ГОСТ I6263—85, можно подразделить на первичные измерительные преобразователи, масштабные измерительные преобразователи, нормирующие и передающие измерительные преобразователи (два последних здесь не рассматриваются).
Первичный измерительный преобразователь переводит контролируемый параметр в выходную физическую величину (перемещение, усилие, сопротивление, напряжение, силу тока, частоту). Выходная физическая величина, полученная из контролируемой простым — «естественным» — преобразованием, называется естественной выходной величиной (или естественным выходным сигналом).
Нормирующий преобразователь переводит естественный выходной сигнал в унифицированный. Если на выходе первичного измерительного преобразователя, чувствительный элемент которого непосредственно воспринимает изменения контролируемого параметра, выдается пневматический или электрический сигнал, то нормирующий преобразователь обычно представляет собой отдельное самостоятельное устройство. Если же первичный преобразователь выдает сигнал в виде усилия, перемещения или какой-нибудь другой физической величины, по своей природе отличающейся от электрической или пневматической, то измерительный и нормирующий преобразователи объединяют конструктивно в один прибор. Оба решения находят широкое применение в практике создания преобразователей для систем автоматизации. В системе ГСП разработан унифицированный ряд взаимозаменяемых пневматических и электрических первичных преобразователей блочного типа с силовой компенсацией. Используя этот ряд преобразователей, можно значительное количество различных измеряемых параметров сравнительно просто и с достаточной точностью преобразовать в одну естественную выходную величину — усилие.
14
Пневматические первичные измерительные преобразователи имеют выходной сигнал 0.02—0.I МП а (0,2—1,0 кгс/см8), электрические 0—20 мА и 0—5 мА постоянного тока. Компенсационный принцип действия этих преобразователей обеспечивает их высокие метрологические характеристики и простоту перенастройки в большом интервале пределов измерений. Каждый первичный преобразователь состоит из унифицированного электрического или пневматического преобразователя усилия и измерительного блока.
Класс точности унифицированных преобразователей в основном 0,6; 1,0 и лишь для некоторых 1.6 и 2.5.
2.2. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
Из электрических аналоговых преобразователей, выполняемых по схеме компенсации перемещений для преобразования не электрических величин в электрический выходной сигнал и передачи показаний на расстояние, наибольшее применение нашли дифференциально-трансформаторные, ферродпнампческие, магнитомодулянпонные и сельсинные преобразователи.
В дифференциально трансформаторных преобразователях перемещение сердечника первичного прибора уравновешивается известным перемещением сердечника вторичного прибора. Дифференциально-трансформаторные преобразователи используются при измерении давления, уровня, расхода и некоторых других
параметров. 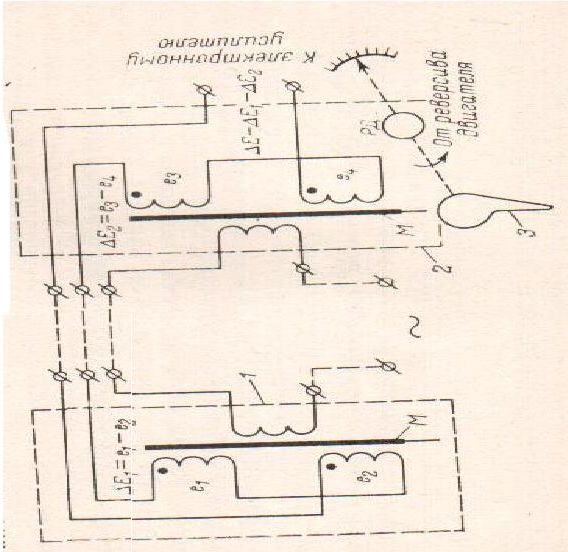
Риг. 2.2. Принципиальная схема электросилового линейного преобразователя
мотки силового трансформатора электронного усилителя. Вторичные обмотки включены навстречу одна другой с выходом на электронный усилитель. Внутри катушек находятся железные плунжеры (магнитопроводы) М. Если плунжеры обеих катушек находятся в среднем положении, то величины э. д.с, наводимые в катушках, равны между собой. При рассогласовании положений плунжеров величины э. д. с, наводимые в катушках, неравны между собой.
Разность этих э.д.с. усиливается в электронном усилителе до величины, необходимой для управления реверсивным двигателем РД. Последний через профилированный диск 3 перемешает плунжер в катушке вторичного прибора в положение, согласованное с положением плунжера в катушке первичного прибора, что приводит к равенству э.д.с, наводимых в обеих катушках, а следовательно, к новому состоянию равновесия. При этом результирующая э.д.с. вторичных обмоток будет снова равна нулю, и реверсивный двигатель остановится. Одновременно реверсивный двигатель связан со стрелкой и пером вторичного прибора.
При перемещении плунжера первичного прибора на расстояние до 5 мм зависимость индуктированной э.д.с. практически линейна. Вторичные приборы дифференциально-трансформаторной системы построены на базе автоматических потенциометров.
В электрических преобразователях аналоговой ветви ГСП используют электросиловые преобразователи двух типов — линейный, обеспечивающий прямо пропорциональную (линейную) зависимость между усилием и выходным сигналом, и квадратичный, выходной сигнал которого пропорционален корню квадратному из усилия. Преобразователи комплектуют усилителем типа УП-20, выполненным в виде отдельного блока.
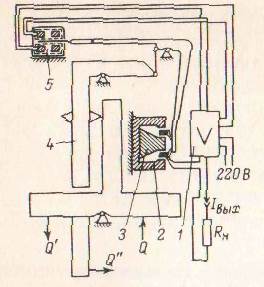
Принципиальная схема линейного преобразователя представлена на рис. 2.2. Усилие Q, которым измерительный блок воздействует на преобразователь, вызывает незначительное перемещение рычажной системы 4 передаточного механизма и связанного с ней управляющего флажка 5 индикатора рассогласования. Индикатор рассогласования дифференциально-трансформаторного типа преобразует это перемещение в управляющий сигнал переменного тока, поступающий на вход электронного усилителя /. Выходной сигнал усилителя в виде постоянного тока поступает в катушку 2 силового устройства и одновременно в последовательно соединенную с ней линию дистанционной передачи.
В линейном преобразователе при взаимодействии постоянного магнита 3 с магнитным полем, создаваемым током, протекающим в катушке 2, создается пропорциональное силе тока усилие, уравновешивающее через рычажную систему входное усилие.
В квадратичном преобразователе сила, с которой втягивается ферримагнитный проводник в иоле, создаваемое неподвижным электромагнитом, пропорциональна квадрату силы тока, протекающего по катушке.
Линейный и квадратичный преобразователи различаются только устройством обратной связи силового механизма.
Конструкция преобразователя позволяет присоединять к нему измерительные блоки, создающие усилия в разных направлениях Q', Q" или Q. Дистанционная передача сигнала может достигать 10 км.
Подключаемые к преобразователю вторичные приборы можно разделить па две группы: работающие от унифицированного сигнала постоянного тока (миллиамперметры, приборы магнитоэлектрической и электромагнитной систем) и работающие от сигнала постоянного напряжения (вольтметры, промышленные потенциометры, электрические машины централизаинопного контроля и управления).
Приборы первой группы (токовые) подключают к электронному усилителю преобразователя в разрыв электрической цепи двухпроводной линии связи (приборы этой группы соединены последовательно). Приборы второй группы (приборы постоянного напряжения) подключают параллельно нагрузочному сопротивлению R », включенному в цепь двухпроводной линии связи.
2.3. ПНЕВМАТИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
В пневматических преобразователях основным элементом является система сопло-заслонка (рис. 2.3). В трубку У небольшого диаметра непрерывно поступает воздух под давлением Пройдя через дроссель постоянного сечения 2. воздух выходит в атмосферу через дроссель 3 (сопло), перед которым находится заслонка 4. Если изменить зазор между соплом и заслонкой, то давление воздуха Р в междроссельном пространстве
Рис. 2.3. Пневмопреобразователь типа сопло-заслонка
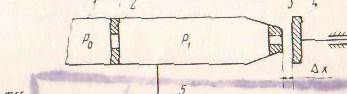
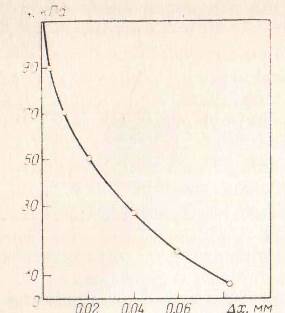
Рис. 2Л. Зависимость давления Р\ н меж-Лроссельном пространстве системы сопло-заслонка от зазора \х между соплом и заслонкой
будет также изменяться: увеличиваться с приближением заслонки к соплу и уменьшаться при удалении заслонки от сопла. Изменение давления Р\ контролируется манометром о.
Зависимость между зазором Хх и давлением Р\ показана на рис. 2.4. Как видно из графика, весьма небольшие перемещения заслонки (до 0.08 мм) вызывают значительные— от 10 ю 110 к11а — изменения давления воздуха Р,.
Преобразователи силовой компенсации. Для непрерывного преобразования абсолютного, избыточного и вакуумметрнческо-10 давления (разрежения, перепада давления), расхода, температуры жидкостей и газов, уровня, плотности жидкости и некоторых других параметров в пневматический сигнал дистанционном передачи предназначены преобразователи, основанные на принципе силовой компенсации. В "лих преобразователях измеряемый параметр воздействует на чувствительный элемент измерительного блока и преобразуется в усилие, которое автоматически уравновешивается усилием, развиваемым давлением воздуха з спльфоне обратной связи. Это давление является одновременно выходным сигналом преобразователя.
Преобразовательная схема преобразователя представлена на рнс. 2.5 Усилие Q . которым измерительный блок воздействует на преобразователь, вызывает незначительное перемещение
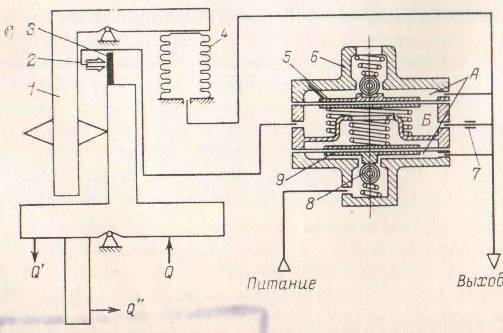
чажной системы передаточного механизма и связанной с ней заслонки 3 относительно неподвижного сопла 2. Возникший в пиши сопла сигнал управляет давлением, поступающим с пневмоусилителя в сильфон 4 обратной связи.
Конструкция преобразователя позволяет присоединять к нему измерительные блоки, создающие усилие в разных направлениях Q , Q ' или Q ". Усилитель (ппевмореле) состоит из трех секций, разделенных мембранами из прорезиненного полотна, которые образуют две камеры давления командного воздуха А и камеру линии сопла Б. Повышение давления в линии сопла вызывает перемещение мембран 5 и 9. и клапан 8 открывается. При этом давление командного воздуха повышается на неличину, равную величине повышения давления в линии сопла, возникает постоянный перепад на дросселе 7, и влияние изменения давления питания значительно уменьшается. При уменьшении давления в линии сопла шариковый клапан 8 закрывается, клапан сброса 6 открывается, и давление командного воздуха уменьшается. Преобразователь обеспечивает дистанционную передачу выходного сигнала по пневмотрассе длиной до 300 м. Класс точности преобразователя 1.0.
Преобразователь типа ПП предназначен для преобразования угловых перемещений в пропорциональный пневматический сиг-пал. Используек-i в качестве выходного преобразователя в приборах и устройствах частотно-ферродинамической системы, устанавливаемых в схемах автоматического управления производственными процессами^ Принципиальная схема преобразователя приведена на рнс. 27(3.
Угловое перемещение сектора / через ось 2 передается барабану 3. При помощи гибкой лепты 9, связанной с барабаном и огибающей отклоняющий ролик 8, угол поворота барабана преобразуется в пропорциональное усилие пружины 7. Усилие, развиваемое пружиной, через рычаг 6 воздействует на заслонку 15 ппевмоусилнтеля.
Основным элементом ппевмоусилнтеля является «сопло-заслонка». Питающий воздух из линии поступает в камеру / и через постоянный дроссель 4 в камеру //. Давление в камере // зависит от количества воздуха, поступающего в эту камеру через дроссель 4, и расхода его через сопло 14.
Если усилие Р. действующее на заслонку 15 со стороны рычага 6, равно нулю, то дросселирование в сопло 14 весьма незначительно, и давление в камере // приближается к атмосферному. При этом усилие, действующее на мембранную систему 13 снизу вверх, меньше, чем усилие пружины /2, и полый шток // попадает в камеру / V , соединенную с атмосферой.
При увеличении усилия Р, изменяющегося пропорционально углу поворота входной оси 2, сопло 14 в большей степени прикрывается заслонкой 15. Зазор z уменьшается, что создает дополнительное сопротивление истечению воздуха через сопло. Поэтому давление в камере // превышает давление в камере///.
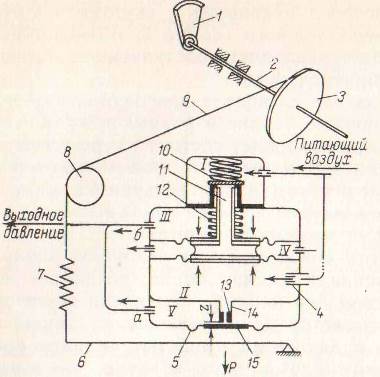
Рис. 2.6. Принципиальная схема преобразователя МП
и мембранная система 13 переметается вверх. Полый шток // упирается в тарельчатый клапан 10. закрывая выход в атмосферу, и приподнимает его. открывая доступ питающему воздуху из камеры / в камер) ///. Давление в камере ///. являющееся одновременно выходным, увеличивается до величины, при которой усилия, действующие на мембранную синем) ю снизу вверх и сверху вниз, уравниваются.
Одновременно выходное давление из камеры /// передается в камеру V . Это давление, воздействуя на мембрану 5. с которой связана заслонка 15,—уравновешивает усилие Р.
Линейность характеристики достигается тем. что мембранная система 13 поджата пружиной 12 всегда на одну и ту же величину, а так как перемещение тарельчатого клапана 10 очень мало, перепад давления на сопле 14 постоянен.
Класс точности преобразователя 1.0. Преобразователь обеспечивает передачу по пневмотрассе показаний на расстояние до 300 м.
В качестве вторичных приборов в пневматических системах можно применять любые измерители давления, а также вторичные приборы, например системы «Старт». На рис. 2.7 показана кинематическая схема вторичного прибора системы «Старт» (ПВ2.2). \_/ Действие приборов основано на компенсационном принципе измерения. Приборы используются для работы с пневматическими преобразователями или другими устройствами, выдающими унифицированные аналоговые сигналы 20—100 кПа (0,2— 1.0 кгс/см2).
В измерительном узле входной пневматический сигнал Р преобразуется в поступательное перемещение указателя (стрелки) н пера. Контролируемый параметр (входной пневматический сигнал Р) поступает в приемный снльфон 2. Воздух питания под давлением Рпш через дроссель / подается в силовой элемент 7 и к соплу 3. При изменении входного давления снльфон 2. дно которого упирается в рычаг 4, перемешает его, изменяя зазор между соплом и рычагом.
При перемещении рычага 4 вправо давление в силовом эле- I менте 7 увеличивается, так как зазор между рычагом и соплом
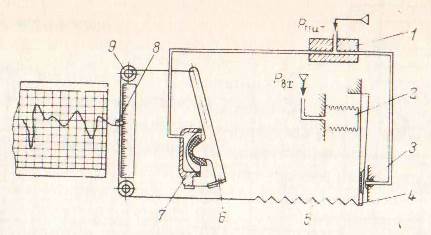
Рис. 2.7. Кинематическая схема вторичного прибора системы «Старт»
уменьшается. Это давление передается на рычаг 6 силового элемента, и ролик 9 поворачивается на угол, необходимый для достижения равновесия на рычаге 4 между усилиями от давления в енльфоне и пружины обратной связи 5. Углу поворота ролика соответствует пропорциональное перемещение стрелки (пера) 8. Шкала прибора стопроцентная линейная. Класс точности 1,0.
Дата: 2019-11-01, просмотров: 949.