Цель работы: исследовать свойства и поведение динамических объектов, описываемых системами обыкновенных нелинейных дифференциальных уравнений, используя для их решения средства пакета MathCAD.
Содержание работы:
1) изучить теоретические положения (раздел 3.1), определяющие структуру динамических объектов, их математическое описание и решение задачи анализа объектов, методы решения обыкновенных дифференциальных уравнений и систем уравнений;
2) выполнить индивидуальное задание согласно предусмотренной в разд.3.2 последовательности выполнения работы;
3) оформить описание контрольной работы согласно требованиям задания.
3.1. Краткие теоретические положения
3.1.1. Структура и математическая модель объекта
В общем случае под динамическими (нестационарными) объектами понимают такие объекты, состояние и поведение которых определяется временными характеристиками, т.е. является функцией времени.
Такого рода объекты могут быть описаны системами нелинейных дифференциальных уравнений вида 
где  – функционал, определяющий конкретный вид системы уравнений, которая описывает структуру объекта;
– функционал, определяющий конкретный вид системы уравнений, которая описывает структуру объекта;  – вектор переменных, описывающий выходы объекта;
– вектор переменных, описывающий выходы объекта; 
 – вектор производных;
– вектор производных;  – вектор внутренних параметров уравнения, определяющий конкретную реализацию объекта при заданной его структуре;
– вектор внутренних параметров уравнения, определяющий конкретную реализацию объекта при заданной его структуре;  – внешние (входные) воздействия на объект.
– внешние (входные) воздействия на объект.
Системе уравнений вида:

будет соответствовать структура объекта, изображенного на рис 3.1.
Структура объекта определяется интеграторами И1 и И2 , сумматорами S1, S2, S3, и S4, линейно– усилительными блоками а11 , а12 ,а21 ,а22 и системой связей между ними.
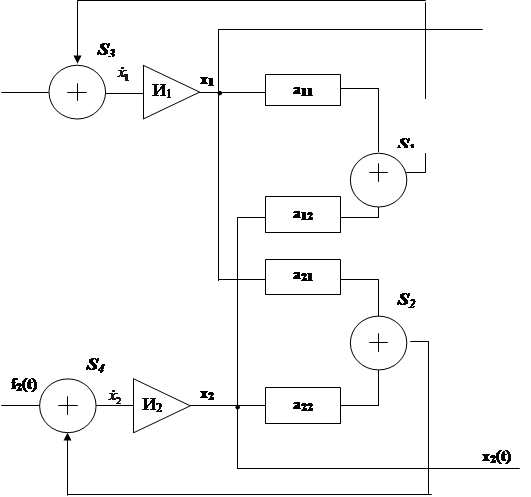
Рис 3.1. Структура динамического объекта.
3.1.2. Анализ динамических объектов
Задача анализа динамических объектов состоит в исследовании зависимости выходных значений объекта х1(t) и х2(t) как функции времени при заданных внешних (входных) воздействиях на объект f1(t) и f2 (t) и внутренних параметрах объекта а11 , а12 ,а21 ,а22 .
Решение задачи анализа состоит в динамическом моделировании объекта, который описывается системой обыкновенных дифференциальных уравнений, и заключается в решении (интегрировании) системы уравнений на интервале времени. Этот интервал времени (от  – начального до
– начального до  – конечного) называется интервалом интегрирования. В большинстве практических случаев
– конечного) называется интервалом интегрирования. В большинстве практических случаев  равно нулю, то есть моделирование начинается в нулевой момент времени. В описании такого рода систем переменная
равно нулю, то есть моделирование начинается в нулевой момент времени. В описании такого рода систем переменная  называется независимой, а все остальные переменные – зависимыми.
называется независимой, а все остальные переменные – зависимыми.
3.1.3. Решение обыкновенных дифференциальных уравнений
Дифференциальными называются уравнения, содержащие одну или несколько производных. В зависимости от числа независимых переменных, и, следовательно, типа входящих в них производных, дифференциальные уравнения делятся на две категории:
обыкновенные дифференциальные уравнения (ОДУ), содержащие одну независимую переменную и производные по ней;
дифференциальные уравнения в частных производных (ДУЧП), содержащие несколько независимых переменных и производных по ним, которые называются частными производными.
Для решения дифференциальных уравнений могут применяться различного рода аналитические и численные методы. Аналитические методы основаны на прямых преобразованиях системы уравнений, приводящих к точному аналитическому решению. Однако такие методы сложны, не универсальны с точки зрения системы уравнений и приводят к решениям только в самых простых случаях. Поэтому они малоприемлемы при решении практических задач.
В последнее время в связи с бурным развитием вычислительной техники широкое применение получили численные методы решения дифференциальных уравнений. В основе этих методов лежит итерационное повторение однотипных вычислительных операций и поэтому они достаточно просто реализуются на ПЭВМ. Эти методы позволяют с заданной точностью находить на интервале интегрирования требуемое количество точек по времени для всех переменных, входящих в систему уравнений.
Среди этих методов можно выделить явные методы (метод Эйлера, метод Рунге–Кутта), простые в реализации. Количество проводимых вычислений для них зависит только от количества переменных и заданного количества точек определения значений переменных на интервале интегрирования. Точность вычисления результатов для этих методов значительно уменьшается при увеличении интервала интегрирования. Лишенной этого недостатка является группа неявных методов (методы прогноза и коррекции), но они обычно превосходят явные по количеству вычислений.
3.1.3.1. Численные методы решения обыкновенных дифференциальных уравнений
3.1.3.1.1. Решение задачи Коши. Дано обыкновенное дифференциальное уравнение первого порядка

Требуется найти решение  этого уравнения, удовлетворяющее начальному условию
этого уравнения, удовлетворяющее начальному условию  на интервале
на интервале  .
.
Численное решение задачи Коши состоит в нахождении значений  в точках
в точках  отрезка , где
отрезка , где  – шаг интегрирования. Число разработанных методов решения задачи Коши очень велико. Можно выделить две группы методов:
– шаг интегрирования. Число разработанных методов решения задачи Коши очень велико. Можно выделить две группы методов:
Одношаговые методы, в которых для нахождения следующей точки на кривой  требуется информация лишь об одном предыдущем шаге.
требуется информация лишь об одном предыдущем шаге.
Одношаговыми являются метод Эйлера и методы Рунге–Кутта.
2. Многошаговые методы (методы прогноза и коррекции), в которых для отыскания следующей точки кривой  требуется информация более чем об одной из предыдущих точек. К числу таких методов относятся методы Милна, Хемминга, Адамса-Башфорта.
требуется информация более чем об одной из предыдущих точек. К числу таких методов относятся методы Милна, Хемминга, Адамса-Башфорта.
3.1.3.1.2. Метод Эйлера. Метод Эйлера – это простейший метод, позволяющий интегрировать дифференциальные уравнения первого порядка. Однако на основе этого метода легче понять алгоритмы других, более эффективных методов.
Метод Эйлера основан на разложении  в ряд Тейлора в окрестности
в ряд Тейлора в окрестности  .
.
Запишем ряд Тейлора:

При малом  членами высоких порядков можно пренебречь. Тогда:
членами высоких порядков можно пренебречь. Тогда:

Таким образом, получим значение зависимой переменной  при малом смещении от начальной точки
при малом смещении от начальной точки  . Этот процесс можно продолжить, используя соотношение
. Этот процесс можно продолжить, используя соотношение
или

3.1.3.1.3. Модифицированный метод Эйлера (метод Эйлера – Коши). Тангенс угла наклона касательной к кривой  известен в
известен в  и равен
и равен  , но он меняется с изменением независимой переменной, и в точке
, но он меняется с изменением независимой переменной, и в точке  наклон касательной уже не такой, как в , т.е. на интервале вносится погрешность.
наклон касательной уже не такой, как в , т.е. на интервале вносится погрешность.
Точность метода Эйлера можно существенно повысить, улучшив аппроксимацию производной. Это можно сделать, использовав среднее значение производной в начале и конце интервала.
В модифицированном методе Эйлера сначала вычисляется значение функции в следующей точке по методу Эйлера.
 ,
,
которое используется для приближенного вычисления значения производной в конце интервала, т.е.
 .
.
Вычислив среднее значение производной между полученным в начале и в конце интервала, найдем более точное значение  :
:

Принцип, на котором основан модифицированный метод Эйлера, можно пояснить иначе. Вернемся к разложению в ряд Тейлора:

Попытаемся сохранить член с  ; для этого
; для этого  аппроксимируем конечной разностью:
аппроксимируем конечной разностью:

Подставив это выражение в ряд Тейлора, получим:

Это выражение совпадает с ранее полученным.
Данный метод является методом второго порядка, поскольку в нем используется член ряда Тейлора, содержащий  .
.
3.1.3.1.4 Метод Рунге – Кутта. Точность одношаговых методов можно повысить, если осуществить более точную аппроксимацию производной на интервале , т.е. использовать члены более высоких порядков в разложении Тейлора.
Чтобы удержать в ряде Тейлора член  – го порядка, необходимо вычислять
– го порядка, необходимо вычислять  – ю производную зависимой переменной. При использовании модифицированного метода Эйлера для получения второй производной в конечно – разностной форме достаточно было знать наклоны кривой на концах рассматриваемого интервала. Чтобы вычислить третью производную в конечно– разностном виде, необходимо иметь значения второй производной по меньшей мере в двух точках. Для этого необходимо дополнительно определить наклон кривой в некоторой промежуточной точке интервала , т.е. между
– ю производную зависимой переменной. При использовании модифицированного метода Эйлера для получения второй производной в конечно – разностной форме достаточно было знать наклоны кривой на концах рассматриваемого интервала. Чтобы вычислить третью производную в конечно– разностном виде, необходимо иметь значения второй производной по меньшей мере в двух точках. Для этого необходимо дополнительно определить наклон кривой в некоторой промежуточной точке интервала , т.е. между  и
и  . Очевидно, чем выше порядок вычисляемой производной, тем больше дополнительных вычислений потребуется внутри интервала.
. Очевидно, чем выше порядок вычисляемой производной, тем больше дополнительных вычислений потребуется внутри интервала.
Метод Рунге-Кутта дает набор формул для расчета координат внутренних точек, требуемых для реализации этой цели.
Алгоритм Рунге-Кутта первого порядка является методом Эйлера.
Алгоритм Рунге-Кутта второго порядка является модифицированным методом Эйлера (методом Эйлера – Коши). Для вычисления получаем формулы:
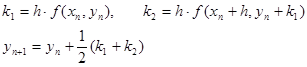
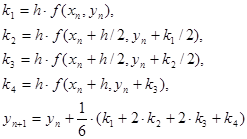
Наиболее распространенный вариант метода – метод четвертого порядка точности. Для вычисления  получаем формулы:
получаем формулы:
3.1.3.1.5 Автоматический выбор шага. В приведенных выше методах величина шага изменения предполагалась постоянной. Очевидно, что при интегрировании с малой величиной шага мы будем получать более точное решение.
Однако, указать заранее приемлемую величину шага сложно. Если шаг выбрать большой, то будет недостаточной точность результатов. Если же шаг выбрать очень малый, то это увеличивает число шагов и время решения.
Поэтому некоторые программы интегрирования, применяемые на практике, снабжены процедурой автоматического выбора шага. В результате этого на участках плавного изменения интегральной кривой шаг автоматически увеличивается, а при резких изменениях функции шаг уменьшается.
3.1.3.1.6. Общая характеристика одношаговых методов. Чтобы получить информацию в новой точке, нужно иметь данные о предыдущей точке.
В основе всех одношаговых методов лежит разложение функции в ряд Тейлора, в котором сохраняются члены, содержащие степени до  включительно. Целое число
включительно. Целое число  называют порядком метода. Погрешность на шаге имеет порядок
называют порядком метода. Погрешность на шаге имеет порядок  .
.
Все одношаговые методы не требуют действительного вычисления производных – вычисляется лишь сама функция (правая часть уравнения). Могут потребоваться значения функции в промежуточных точках, что влечет дополнительные затраты времени.
Дата: 2019-07-30, просмотров: 412.