Расчет двигателя и коэффициентов для уравнений динамики
Расчет коэффициентов для уравнений динамики произведем по методике изложенной в [7].
Введем относительные величины:
Ф = Фа / Фб; U = Ua / Uб; f = fa / fб; l = la / lб;
H = Ha / Hб; X = Xa / Xб; γ2 = γ2a / Xб,
где индекс «а» относится к абсолютным величинам, а ииндекс «б» – к базисным. В качестве Фб выбираем значение магнитного потока, при котором относительная величина Ф выразится простыми числами.
Пусть,
Фб=Вб *π*r21а,
где Фб – базисное значение магнитной индукции.
Из условия подобия магнитных полей, следует равенство величин индукции в сходных точках поля. Так как относительная индукция не должна зависить от абсолютных размеров, базисное значение должно быть постоянной величиной, Вб=const. Полагаем Вб=1Тл., при этом относительная величина магнитного потока станет равной относительному значению индукции якоря Фх=Вх и окажется независящей от абсолютных размеров для геометрически подобных систем.
Расчет магнитных проводимостей
Определим магнитную проводимость потоков рассеяния на единицу длины обмотки.
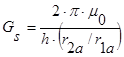 ,
,
где r1а – радиус якоря, r1а=0,01 м.;
r2a – внешний радиус обмотки, r2а=0,017 м.;
μ0 – магнитная проницаемость в вакууме, μ0=4π*10 –7 Гн/м;
Gs =4,74*10 –7 Гн.
Проводимость рабочего зазора в относительной форме:
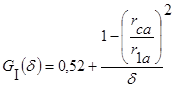 ,
,
где rса – радиус направляющего стержня;
δ – начальный рабочий зазор.
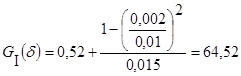 ,
,
Рассчитаем проводимость нерабочего зазора:
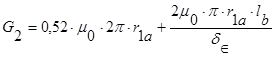 ,
,
где lb – ширина магнитопровода, lb=0,01 м;
 – зазор между сердечником и магнитопроводом, = 0,0002 м.
– зазор между сердечником и магнитопроводом, = 0,0002 м.
Определим относительное значение GII магнитной проводимости нерабочего зазора:
 ,
,
Рассчитаем относительные значения магнитных проводимостей для двух точек при х=0,015 м., GI(х)=64,52;
при х=0,005 м., GI(х)=192,5.
Найдем производную:
 ;
;  .
.
Так как производная по нерабочему зазору равна нулю, можно сделать вывод, что сила тяги создается только в рабочем зазоре.
Расчёт трансформатора с выпрямителем
Определение мощности трансформатора производится исходя из мощности импульсов на выходе и скважности. Скважность q определяется соотношением:

где  – период следования импульсов;
– период следования импульсов;
 – длительность импульсов.
– длительность импульсов.
В данном случае 


Мощность импульса определяется
В данном случае  ,
, 

Мощность трансформатора с выпрямителем получится в виде:
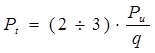
Коэффициент «3» взят с учётом потерь в ограничительном резисторе и не идеальности формирования импульсов.
Таким образом для расчёта трансформатора получаются следующие исходные данные:
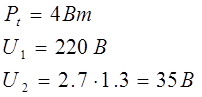
Тогда
Площадь поперечного сечения сердечника определятся выражением:

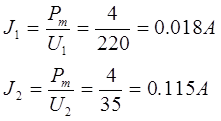
 Сечение провода определяется из плотности тока
Сечение провода определяется из плотности тока 
Проверяем заполнение медью
Коэффициент 1.7 учитывает реальное заполнение и изоляцию. В данном случае имеется большой запас сечения окна по меди, и можно в принципе уменьшить сечение, и это означает, что данные параметры трансформатора вполне реализуемы.
В качестве выпрямительного моста используем мост КЦ 402 В, с параметрами:
Как видно, имеются достаточные запасы по обратному напряжению и выпрямляющему току.
Технологическая часть
3.1 Описание электрической схемы пульта проверки короткозамкнутых витков катушки
Электрическая схема пульта состоит: из блока питания, включающего в себя понижающий трансформатор – ТР-1 и выпрямитель на диодах Д4 – Д7; фильтра из конденсаторов исключающих взаимное влияние напряжений транзисторов; стабилизатора напряжения Д 8 – Д11; генератора звуковой частоты, выполненного на лампах Л1 и Л2 (или полевых транзисторах Т1 – Т2); выходного транзистора ТР 2; мостовой схемы с измерителем ИП – 1 и измерительной катушки индуктивности l1 с сердечником, на который надевается проверяемая катушка.
Мостовая схема реагирует на изменения индуктивности в цепях измерительной катушки l1, вызываемые наличием в проверяемой катуше К3В.
Настроечная цепь питается через трансформатор ТР 2 и сопротивление R18. При измерениях сравнивается два напряжения:
1) выпрямленное диодом Д2 напряжение, пропорциональное напряжению настроечной цепи;
2) напряжение в цепи выходного трансформатора ТР 2, которое по величине равно выпрямленному напряжению с Д1, пропорционального напряжению питания.
Поэтому любое изменение напряжения, вызванного наличием КЗВ проверяемой катушки, вызывает отклонение стрелки микрометра ИП 1.
Напряжение настроечной цепи практически не зависит от емкостной составляющей полного сопротивления проверяемой катушки из-за низкой частоты (около 400 Гц).
Предварительная настройка схемы осуществляется резисторами R 10, R 16, R7, R 17; окончательная балансировка моста осуществляется потенциометром R20. Контроль работы схемы осуществляется кнопкой КН 1.
Исходя из предложенной схемы на лицевую панель пульта необходимо вынести: сердечник измерительной катушки L 1, измерительный прибор ИП 1, кнопку КН 1, ручку потенциометра R 20, выключатель сети В 1 и сигнальную лампу Л 3.
Описание конструкции пульта
Пульт представляет собой коробчатую конструкцию. На передней панели (поз. 1) располагается измерительный прибор – микроамперметр, выключатель питания, ручка регулятора подстречного резистора R 20 (см. электрическую схему), кнопка проверки чувствительности прибора КН 1 и сигнальная лампочка, сигнализирующая отключение пульта. На переднюю панель выведен также измерительный стержень катушки индуктивности (поз. 4).
Передняя панель соединяется с задней стенкой (поз. 6) двумя основаниями (поз. 5); в нижнем основании прикреплены четыре ножки (поз. 7). На внутренних сторонах панели (поз. 1) и стенки (поз. 6) закрепляется плита (поз. 2), на которой смонтирован блок питания пульта, фильтр, генератор и измерительный мост согласно электрической схемы.
На задней стенке закрепляется разъем (поз. 14); сверху и сбоку пульт закрыт кожухом (поз. 3).
Экономическая часть
Маркетинговые исследования
Заключение
1. По разработанным чертежам изготовлен и апробирован блок питания и ЛЭМД
2. Устройство для обработки биологических тканей, модернизация которого проведена в процессе дипломного проектирования, приобрело такие положительные качества, отсутствовавшие у предыдущего образца, как меньший диаметр (около 60 – ти миллиметров у старого образца, и 30 миллиметров у нового), что делает его более удобным и применимым на практике в условиях хирургических операций на костных тканях, а также в стоматологии и даже в процессе проведения косметических операций;
Питание устройства происходит от стандартной сети (220 В, 50 Гц), для чего был спроектирован и рассчитан блок питания, включающий в себя также фильтр от помех в сети, делающий работу устройства более надёжной;
Устройство сохранило такие немаловажные положительные качества, как достаточный импульс удара, возможность замены инструмента;
Спроектированное устройство отвечает всем требованиям, предъявляемым к электро – медицинским приборам (выходное напряжение с блока питания – 27 В).
В пояснительную записку к проекту включены исследования по организационно – экономической части, безопасности устройства, технологии, а также произведён патентный поиск на предмет существующих трепанаторов и линейных двигателей.
Ещё одно немаловажное исследование экономических показателей модернизированного устройства показало, что его производство на малом приборостроительном предприятии более выгодно, ибо его себестоимость меньше (за счёт уменьшения расхода материала и трудоёмкости работы при его производстве).
Литература
1. Агаронянц Р.А. Динамика, синтез и расчет электромагнитов. – М.: Наука, 1967. – 269 с.
2. А.с. №540631 СССР, МПК А61В 17/16, Устройство для обработки костей / Болдырев Р.Н., Воинов В.П, Мулюков К.И., Кацнельсон Н.Б., Купряшкин Е.А., 1976.
3. А.c. №578062 СССР, МПК А61В 17/16, Устройство для обработки костей / Воинов В.П., Болдырев Р.Н., Мулюков К.И., 1980.
4. А.с. №688187 СССР, МПК А61В 17/16, Устройство для обработки костей / Воинов В.П., Ведерников Н.М., Болдырев Р.Н., 1981.
5. А.с. №860753 СССР, А61В 17/16, Устройство для обработки костей / Воинов В.П., Ведерников Н.М., 1981.
6. А.с. №895419 СССР, МПК А61В 17/16. Устройство для обработки костей / Воинов В.П., Бучин В.Г., 1982.
7. А.с. №925326 СССР, МПК А61В 17/16, Устройство для обработки костей / Шумада И.В., Яворский Ю.Д., Катонин К.И., 1982.
8. А.с. №836353 СССР, МПК А61В 17/16, Устройство для обработки костей / Ведерников Н.М. Воинов В.П., Бучин В.Г., 1982.
9. А.с. №950358 СССР, МПК А61В 17/16, Устройство для трепанации костей черепа / Зененов Е.С., 1982.
10. А.с. №969258 СССР, МПК А61 В 17/16, Ультразвуковое устройство для механической обработки костных тканей / Григорьев А.М., Крючок А.Г., 1982.
11. А.с. №1144695 СССР, МПК А61В 17/16, Устройство для обработки костных тканей / Цыбульский А.П., Репин В.А., 1985.
12. А.с. №1152577 СССР, МПК А61В 17/16, Двигатель колебательный пневматический ротационный для хирургических инструментов / Зененов Е.С., Кильнинов А.А., 1985.
13. А.с. №1153897 СССР, МПК А61В 17/16, Механизированный инструмент для резания костных тканей / Сабатов В.Х.; Репин В.А., 1985.
14. А.с. №1245304 СССР, МПК А61В 17/16, Устройство для разрезания костных тканей / Сабитов В.Х., Репин В.А., 1986.
15. А.с. №1245305 СССР, МПК А 61 В 17/16 А1. Устройство для разрезания костных тканей / Сабитов В.Х., Репин В.А., 1986.
16. А.с. №1498472 СССР, А61B 17/16, Зубоврачебный инструмент / Шаровецкий Г.Г., 1989.
17. Близняков Л.В. Краткий справочник технолога машиностроителя и мастера механических цехов. – Рязань: Рязан.книж. из-во, 1963. – 310 с.
18. Бочарова М.Д. Электротехнические работы Б.С. Якоби. – М.-Л.: Госэнергоиздат, 1959. – 232 с.
19. Волчек В.И. Основы отаринтологии. – Ленинград, 1939.
20. Гжиров Р.И. Краткий справочник конструктора. – Л. Машиностроение, 1984. – 480 с.
21. Заплетохин В.А. Конструирование соединений деталей в приборостроении. Справочник. – Л.: Изд-во Лен.ун-та, 1974.
22. Заплетохин В.А. Конструирование соединений деталей в приборостроении. Справочник. – Л.: Машиностроение, 1985. – 223 с.
23. Иванов В.И., Дуйденко Б.Н., Тлегенов Ш.К. Расчет энергии разрушения при дроблении кости // Известия ВУЗов «Пищевые технологии», 1988. – №2. – С117–118.
24. Кнетс И.В. и др. Деформирование и разрушение твердых биологических тканей. – Рига: Зинатне, 1980. – 319 с.
25. Пановко Я.Г. Основы прикладной теории колебаний и удара. – Л.: Политехника, 1990. – 272 с.
26. Патент №2012251 России, МПК А61В 17/16, Электромеханическое устройство для резания костных тканей, остетотомии, введения и извлечения штифтов при остеосинтезе и для массажа / Бородин В.В., 1992.
27. Патент №2102018 России, МПК А61В 17/16, Устройство для обработки тканей / Рамзаев А.П., Рогова Е.Г., Ходаковский А.В., 1998.
28. Тер-Акопов А.К. Динамика быстродействующих электромагнитов. – М.: Энергия, 1965. – 230 с.
29. 175.658.305 Хирургическое буровое долото программы маршрутизации.
30. 185.638.290. блок, составляющий шпиндель бора для расширения отверстий и бор для расширения отверстий для хирургии.
31. 195.591.170. Костно – мозговое рассечение кости.
32. 345.376.092. Бор для расширения отверстий для формирования углублений кости.
33. 485.055.105 Буровое долото костного сверла.
34. 594.884.571. Черепной перфоратор с повторно используемым режущим сегментом.
35. 694.600.006 Черепной перфоратор.
Расчет двигателя и коэффициентов для уравнений динамики
Расчет коэффициентов для уравнений динамики произведем по методике изложенной в [7].
Введем относительные величины:
Ф = Фа / Фб; U = Ua / Uб; f = fa / fб; l = la / lб;
H = Ha / Hб; X = Xa / Xб; γ2 = γ2a / Xб,
где индекс «а» относится к абсолютным величинам, а ииндекс «б» – к базисным. В качестве Фб выбираем значение магнитного потока, при котором относительная величина Ф выразится простыми числами.
Пусть,
Фб=Вб *π*r21а,
где Фб – базисное значение магнитной индукции.
Из условия подобия магнитных полей, следует равенство величин индукции в сходных точках поля. Так как относительная индукция не должна зависить от абсолютных размеров, базисное значение должно быть постоянной величиной, Вб=const. Полагаем Вб=1Тл., при этом относительная величина магнитного потока станет равной относительному значению индукции якоря Фх=Вх и окажется независящей от абсолютных размеров для геометрически подобных систем.
Дата: 2019-07-31, просмотров: 402.