На тему: « Мехатронная система обеспечения заданной скорости электровоза на различных участках пути »
Москва, 2008
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1. Обзор существующих систем управления электровозом
1.1 Блок автоматического управления
1.2 Микропроцессорная система управления и диагностики (МСУД) электровозом ЭП1
2 Объект модернизации
2.1 Преобразователь выпрямительно-инверторный ВИП-5600
2.2 Выпрямительная установка возбуждения ВУВ-118
2.3 Шунтирующие устройства ШУ-001, ШУ-003
2.4 Описание микропроцессорной системы управления и диагностики электровоза (МСУД)
2.5 Ячейки шкафа МСУД
2.6 БлокБИ1.2(БИ1.4)
2.7 Программное обеспечение
2.8 Использование аппаратуры по назначению, техническое обслуживание и текущий ремонт
3 Выбор микроконтроллера
3.1 Общая характеристика
3.2 Четырехступенчатый конвейер команд
3.3 Конфигурирование внешней шины
3.4 Система прерываний
3.5 Генерация системного такта
3.6 Периферия микроконтроллера 80С166
3.7 Аналого-цифровой преобразователь (АЦП)
ЗАКЛЮЧЕНИЕ
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
ВВЕДЕНИЕ
Мехатронная система – это неразделимая совокупность механических, электромеханических и электронных узлов, в которых осуществляется преобразование и обмен энергии, информации. В современных мехатронных системах преобразование движения одного или нескольких тел в требуемые движения других тел осуществляется системой тел (деталей), называемых механизмов. Механизмы входят в состав машин – технических систем и предназначены для осуществления механических движений по преобразованию потоков энергии, силовых взаимодействий, необходимых для выполнения различных рабочих процессов. Часто силовой основой МС является электропривод постоянного и переменного тока, формирующих управляемую электромеханическую систему широкого назначения. Для ЭМС управления характерна тесная взаимосвязь электромеханической части с энергетическим каналом питания и каналом управления, что обуславливает ожидаемые характеристики проектируемого устройства часто в равной степени всеми функциональными звеньями. Управляемые комплексы с электрическим приводом (система, состоящая из двигателя и связанных с ним устройств, приведения в движение одного или нескольких исполнительных механизмов, входящих в состав МС) получили название электромеханических систем (ЭМС).
Создание нового образца МС обычно сопровождается использованием в разнообразных вариантах гибких технологических решений. Разновидностью этого принципа является модульный подход. Модули могут легко соединяться, образуя сложные технические системы, разъединяться, заменяться с целью формирования ТС с другими компонентами и техническими характеристиками при необходимости модернизации и ремонта. В общем случае модуль характеризуется конструктивной и технологической завершенностью, обладает строго фиксированными параметрами (функциональными характеристиками, геометрическими размерами).
Основные технические характеристики
| Номинальное напряжение питания переменного тока, В | 220 |
| Пределы изменения напряжения, В | 198-242 |
| Частота напряжения питания, Гц | 50 |
| Потребляемая мощность: | |
| -для цепей контроля и управления, Вт | не более 50 |
| -для подогрева при температуре окружающего воздуха, ниже – 40°С, Вт | не более 150 |
| Режим работы | продолжительный |
| Охлаждение | естественное |
| Масса: | |
| Блок в сборе, кг | 32 |
Микропроцессорная система управления и диагностики (МСУД) электровозом ЭП1
Микропроцессорной системы управления и диагностики (МСУД) выполняет автоматическое управление электроприводом и электрическими аппаратами серийного электровоза ЭП1 в режимах тяги и торможения. При этом аппаратура МСУД обеспечивает: разгон электровоза до заданной скорости с заданной и автоматически поддерживаемой величиной тока якоря тяговых электродвигателей и последующее автоматическое поддержание заданной скорости, рекуперативное торможение до заданной скорости с последующим автоматическим поддержанием заданной скорости на спусках, автоматическое плавное торможение с учетом тормозных характеристик до полной остановки электровоза, защиту от буксования и юза колесных пар, автоматическую непрерывную диагностику состояния электрооборудования электровоза, стыковку микропроцессорных контроллеров с блоками АСУ безопасности, подключение микропроцессорных контроллеров к IBM PC совместимым персональным компьютерам для отладки рабочих программ и моделирования процесса управления. Требования к организации обмена, составу, кодированию информации и характеристикам электрических сигналов в магистральном канале соответствуют стандарту RS-485 (многоабонентской «токовой петле») Аппаратура микропроцессорной системы управления и диагностики электрооборудования электровоза построена на программных принципах обработки информации с использованием микропроцессорных контроллеров Micro PC. Внешний вид шкафа представлен на рисунке 1.2
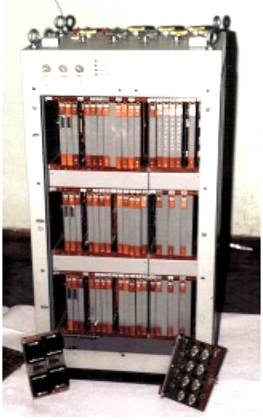
Рисунок 1.2 – Внешний вид шкафа МСУД
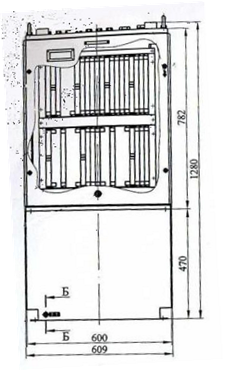
Рисунок 1.3 – Схема микропроцессорной системы управления и диагностики
Схема и габаритные размеры микропроцессорной системы управления и диагностики (МСУД) представлена на рисунке 1.3
Состав аппаратуры МСУД
Состав аппаратуры МСУД электровоза ЭП1 приведен в таблице 1, электровоза ВЛ80ТК(СК) - в таблице 2.
Таблица 1
| Аппаратура МСУД | Состав аппаратуры МСУД | ||
| Шкаф | Блок индикации | Кабель | |
| МСУД1.2 | Шкаф МСУД1.2 – 4шт. | Блок БИ1.2 – 2шт. или Блок БИ1.5 – 2шт. | Кабель 41 – 1шт. Кабель 42 – 1шт. |
Таблица 2
| Аппаратура МСУД | Состав аппаратуры МСУД | ||
| Шкаф | Блок индикации | Кабель | |
| МСУД1.4 | Шкаф МСУД1.4– 4шт. | Блок БИ1.4– 2шт. или Блок БИ1.6– 2шт. | Кабель 42 – 1шт. |
Технические характеристики
§ Аппаратура микропроцессорной системы управления и диагностики электрооборудования электровоза построена на программных принципах обработки информации с использованием микропроцессорных контроллеров Micro PC.
§ Требования к организации обмена, составу, кодированию информации и характеристикам электрических сигналов в магистральном канале соответствуют стандарту RS-485 (многоабонентской «токовой петле»).
§ Скорость передачи информации по магистральному каналу -до 56 Кбит/с.
§ Разрядность центрального процессора - 32. Быстродействие - 800 тыс. оп/с.
§ Емкость оперативного запоминающего устройства - не менее I Мб
§ Емкость постоянного запоминающего устройства - не менее 512 Кб.
§ Количество внешних запросов прерываний - 4.
§ Количество входных аналоговых сигналов - 20. Разрядность интегрирующего аналого-цифрового преобразователя - 12. Уровень входных сигналов - от 0 до 10В.
§ Количество каналов ввода дискретных сигналов в контроллере МПК1 (МПК2) - 24; в контроллере ЦМК - 48. Уровень дискретных сигналов: логический 0 - от 0 до +1 В; логическая 1 - от +30 до +80 В.
§ Количество выходных дискретных сигналов - 36, в том числе в ЦМК - 12. Напряжение коммутации до +80 В, ток активной нагрузки до 1,5 А.
§ Количество выходных импульсных сигналов - 16. Амплитуда выходных импульсов не менее 20 В на нагрузке 68 Ом.
§ Количество каналов программируемых таймеров - 16. Выходной сигнал - импульс длительностью 40 - 100 мкс.
§ Последовательный интерфейс по стыку RS-232 в контроллере ЦМК - 5 каналов; в контроллерах МПК1, МПК2 по одному каналу.
§ Входное напряжение питания 50 В постоянного тока с пределами изменения от 35 до 70 В.
§ Вероятность безотказной работы МСУД в течение 4000 час. (200000 км пробега электровоза) не менее 0,99.
§ Ремонтопригодность МСУД обеспечивается наличием встроенных средств технического диагностирования, ЗИП и конструктивным исполнением, позволяющим оперативно осуществить замену отказавших съемных элементов исправными из состава ЗИП, а также проведение необходимого технического обслуживания.
§ Время готовности МСУД к работе с момента включения при температуре окружающего воздуха выше минус 35 °С не превышает 10 минут, при температуре окружающего воздуха ниже минус 35 °С не превышает 30 минут.
§ Аппаратура МСУД нормально функционирует при воздействии внешних климатических факторов:
× температура окружающей среды для аппаратуры, расположенной в кузове электровоза от минус 50 до + 60 °С, для блоков БИ1.2 - от минус 25 до + 60°С;
× скорость возрастания температуры окружающего воздуха при запуске электровоза в работу до 1 град/мин;
× скорость спада температуры окружающего воздуха после окончания работы электровоза до 2 град/мин;
× относительная влажность воздуха до 100 % при температуре 20 °С;
× возможность выпадения инея;
× тип атмосферы II по ГОСТ 15150-69;
× наличие пыли с концентрацией до 20 мг/куб. м;
× максимальная высота над уровнем моря до 1400м.
§ В части воздействия внешних механических факторов МСУД соответствует группе М25 по ГОСТ 17516.1-90Е:
× синусоидальная вибрация в диапазоне частот 0,5 - 100 Гц с максимальной амплитудой ускорений I § в любом из трех взаимно перпендикулярных направлений;
× одиночные удары в одном горизонтальном направлении с пиковым ударным ускорением 3g и длительностью ударного ускорения 2-20 мс.
Объект модернизации
Описание микропроцессорной системы управления и диагностики электровоза (МСУД)
ЦМК обеспечивает обмен информацией между контроллерами управления и пультами машиниста, диагностику состояния электрооборудования и связь с приборами АСУБ по стыку RS-232.МПК1 или МПК2 последовательно опрашивает состояние входных сигналов от объекта управления, вычисляет значения выходных управляющих воздействий по программе, соответствующей алгоритму управления приводом и другим оборудованием электровоза. В аппаратуре предусмотрен встроенный непрерывный контроль, обеспечивающий проверку ее исправности. При возникновении отказов отдельных компонентов аппаратура либо сохраняет работоспособность, либо передает сообщение в блок БИ1 о необходимости переключиться на другой МПК.
Блок входных фильтров обеспечивает сглаживание пульсаций и кратковременных провалов входного напряжения питания аппаратуры.
2.4.1 В состав ЦМК входят следующие функциональные узлы:
- ячейка микропроцессорного контроллера МК3.1 ( Octagon Systems 6010 ), предназначенная для программной обработки информации, управления приемом-выдачей сигналов обмена с элементами ввода-вывода, сопряжения с внешними устройствами по стыку RS-232;
- две ячейки ввода дискретных сигналов ДИЗ, предназначенные для ввода в контроллер сигналов дискретных датчиков;
- ячейка преобразователей уровней ПУ1.1, предназначенная для гальванической развязки и согласования уровней сигналов цепей шкафа МСУД с цепями ячейки МКЗ, а также выдачи напряжения +5 В для питания энергонезависимого регистратора;
- ячейка вывода дискретных сигналов УДЗ, предназначенная для выдачи управляющих воздействий на дискретные исполнительные механизмы;
- ячейка питания СН5, предназначенная для преобразования напряжения
бортсети 50 В постоянного тока в напряжение +5 В питания узлов аппаратуры, а также для управления подогревом аппаратуры при работе в условиях низких температур;
- блок резисторов БР1, предназначенный для подогрева аппаратуры при работе в условиях низких температур.
2.4.2 В состав МПК1 (МПК2) входят следующие функциональные узлы:
- ячейка микропроцессорного контроллера МКЗ, предназначенная для программной обработки информации, управления приемом-выдачей сигналов обмена с элементами ввода-вывода, ввода информации о состоянии частотных датчиков, выдачи импульсных команд фазового управления тиристорами ВИП и ВУВ, а также управления потоками информации между контроллерами шкафа МСУД и пультами машиниста;
- ячейка преобразователей уровней ПУ1.2, предназначенная для гальванической развязки и согласования уровней сигналов цепей шкафа МСУД с цепями ячейки МКЗ;
- ячейка аналого-цифрового преобразователя АЦ2, предназначенная для интегрирующего преобразования аналоговых сигналов в параллельный 16-разрядный код;
- ячейка ввода дискретных сигналов ДИЗ;
- ячейка ввода аналоговых сигналов и фазовой синхронизации ВФС, предназначенная для формирования по потенциальным условиям начальных углов α0, α0зад, α0ср и γр, а также для формирования сигнала синхронизации процедур ввода/вывода и обработки информации микропроцессорным контроллером;
- две ячейки вывода дискретных сигналов УДЗ;
- ячейка ВФЗ, предназначенная для формирования сигналов γmax, Uси, Uсл1 и Uсл2, необходимых для работы ячейки ВФС;
- ячейка выходных усилителей УВЗ, предназначенная для усиления импульсов управления ВИП;
- ячейка выходных усилителей УВ4, предназначенная для усиления импульсов управления ВУВ;
- ячейка питания СН4, предназначенная для преобразования напряжения бортсети 50 В постоянного тока в напряжения +5 В и +30 В питания узлов аппаратуры и в напряжения +15 В и минус 15 В питания датчиков тока, а также для управления подогревом аппаратуры при работе в условиях низких температур;
- блок резисторов БР2.
Ячейки шкафа МСУД
Ячейка МК3.1
отличается от ячейки МКЗ наличием платы расширения 5555. Плата имеет четыре последовательных порта СОМ4 - СОМ7 RS-232), совместимых с UART 16С55О.
Ячейка ПУ1
предназначена для гальванической развязки и согласования уровней сигналов цепей шкафа МСУД с цепями ячейки МКЗ. Ячейка состоит из следующих функциональных узлов:
- узел гальванической развязки сигналов от датчиков скорости;
- преобразователь интерфейса основного канала связи;
- преобразователь интерфейса резервного канала связи;
- узел связи с ПКБ;
- узел связи с САУТ;
- узел определения направления движения;
- узел контроля включения подогрева;
- скоростной канал связи между микропроцессорными комплектами;
- усилитель сигнала «отказ процессора»;
- гальванически развязанный источник напряжения для питания ПКБ.
Узел гальванической развязки предназначен для защиты и согласования сигналов от датчиков скорости с элементами ячейки МКЗ. Преобразователи интерфейсов RS-232 в RS-485 для основного и резервного канала связи служат для обмена информацией между блоком индикации, устанавливаемым в кабине машиниста и ячейкой МКЗ. В резервном канале связи имеется схема выдачи сигналов в канал отладки, которая обеспечивает соединение процессорной платы ячейки МКЗ с персональным компьютером для обновления и отладки программного обеспечения.
Узел связи с ПКБ передает сигналы интерфейса RS-232 от ячейки МКЗ через канал связи «токовая петля» в энергонезависимый накопитель ЭН. Узел связи с САУТ служит для обмена информацией через канал «токовая петля» между процессорной платой ячейки МКЗ и системой автоматического управления торможением локомотива. Узел контроля включения подогрева предназначен для преобразования напряжения питания цепей подогрева с уровнем 50 В в напряжение параллельного порта процессорной платы ячейки МКЗ с уровнем 5 В для контроля включения цепей подогрева.
Скоростной канал связи между микропроцессорными комплектами предназначен для оперативного обмена информацией между МПК и ЦМК в случае возникновения аварийных ситуаций. Усилитель сигнала «отказ процессора» предназначен для гальванической развязки и усиления сигнала «отказ», формируемого ячейкой МКЗ.
Гальванически развязанный источник 5-ти вольтового напряжения предназначен для питания накопителя ПКБ.
Ячейка ГТУ1.1
устанавливается в ЦМК и отличается от ПУ1 отсутствием узла гальванической развязки отдатчиков скорости и узла определения направления движения.
Ячейка ПУ1.2
устанавливается в МПК и отличается от ПУ1 отсутствием узлов связи с ПКБ и САУТ, узла контроля включения подогрева, а также источника напряжения для питания ПКБ.
Ее устройство
аналогично ячейке ПУI за исключением того, что в качестве преобразователя интерфейса основного канала связи в ней применен интерфейс многоабонентской «токовой петли».
Ячейка питания СН4
предназначена для преобразования напряжения 50 В постоянного тока в напряжения +30 В, +5 В +15 В и минус 15 В питания аппаратуры.
Выходы ячейки гальванически разделены от входа и друг от друга. Каждый выход имеет защиту от перегрузок и коротких замыканий, а также световую сигнализацию о наличии выходных напряжений. Также ячейки СН4 имеет световую сигнализацию перегорания входных предохранителей. Узел коммутации цепей подогрева, представляет собой датчик температуры, который управляет схемой силового ключа, коммутирующего цепи подогрева.
Узел срабатывает при. понижении температуры окружающее среды ниже 30° С.
Ячейка питания СН5
предназначена для преобразования напряжения 50 В постоянного тока в напряжение +5 В для питания аппаратуры. Выход ячейки гальванически разделён от входа и имеет защиту от перегрузки и короткого замыкания, а также световую сигнализацию о наличии выходного напряжения. Также ячейка СН5 имеет световую сигнализацию перегорания входного предохранителя. Конструкция узла коммутации цепей подогрева аналогична ячейке СН4.
БлокБИ1.2(БИ1.4)
Плата РМ (ТМ2)
предназначена для организации связи меж; шкафом МСУД1 и пультом машиниста. Сигналы RS-232 последовательных портов СОМ1 и СОМ2 платы 6010 преобразуются в сигналы RS-485 (токов с петли на плате ТМ2) для передачи в резервную магистраль.
Плата 6010
предназначена для управления всеми ресурсами блока содержит процессор 3865Х-25 МГц, DOS 6.2 в ПЗУ, BIOS Phoenix промышленными расширениями, систему снижения потребляемой мощности электронный флэш-диск 1 Мбайт с файловой системой, ОЗУ 4 Мбайт, последовательные порты СОМ1 и СОМ2, универсальный параллельный по LРТ1, интерфейс с поддержкой НГМД и НЖМД, сторожевой таймер, программной диагностики в ПЗУ, порт клавиатуры и громкоговорителя.
Плата клавиатуры К2
содержит шестнадцать кнопок, соединенных матрицу 4 на 4 для подключения к параллельному порту ЕРТ1 платы 6010 и светодиода, сигнализирующих об отказах контроллеров шкафа МСУД1.
Плата 2430
содержит 1 Мбайт видеопамяти и позволяет выводить видеоинформацию на дисплей ЕЕ640.480-АА1.
Плата ПП (ПП4)
источника питания преобразует напряжена бортовой сети в стабилизированные напряжения, необходимые для питания схем дока, а также содержит усилитель для встроенной акустической системы подстроенный резистор для установки яркости дисплея в режиме "Ночь"
Блок БИ1.5(БИ1.6)
Блок индикации БИ1.5 ТЯБК.469136.113-03 предназначен дл выдачи на жидкокристаллический дисплей алфавитно-цифровой и графическое информации, выдачи через встроенные громкоговорители звуковых сообщений I ввода команд с клавиатуры. Информация выдается либо по запросу клавиатуры, либо в соответствии с алгоритмом работы системы.
Блок БИ1.5 фирмы Planar состоит из:
-платы РМ связи со шкафом МСУД1, содержащей интерфейсные резервированной магистрали RS-485;
- управляющей платы СР11686Е на помехоустойчивой КМОП-структуре с процессором Geode GX - 300 МГц;
- платы клавиатуры Кб Л с шестнадцатью управляющими кнопками регулировки яркости свечения дисплея;
- плат КВ686Е-2 и КВ686Е-3, предназначенных для подключения к плате CPU686E периферийных устройств;
- цветного жидкокристаллического дисплея EL640.480-AA1 с разрешением 640 на 480 точек со встроенной схемой управления и преобразователем питания;
- платы ПП4 источника питания, преобразующего напряжение бортовой сети в стабилизированные напряжения необходимые для питания схем блока;
- индикаторов отказа контроллеров шкафа МСУД.
На рисунке 2.7 представленная точная копия экрана блока индикации (БИ1) фирмы Planar в режиме диагностики аппаратуры МСУД.

Рисунок 2.7 – Точная копия экрана БИ1 аппаратуры МСУД в режиме диагностики
Плата РМ
предназначена для организации связи между шкафом ГСУД1 и блоком индикации.
Плата CPU 686 E
предназначена для управления всеми ресурсами блока и содержит процессор Geode GX - 300 МГц, DOS 6.2 в ПЗУ, систему снижения потребляемой мощности, электронный флэш-диск 8 Мбайт с файловой системой, ОЗУ 16 Мбайт, последовательные порты СОМ1 и СОМ2, универсальный параллельный порт LРТ1, интерфейс с поддержкой НГМД и НЖМД, сторожевой таймер, программу самодиагностики в ПЗУ, порт клавиатуры и громкоговорителя.
Плата клавиатуры К6.1
содержит шестнадцать кнопок, соединенных в матрицу 4 на 4 для подключения к параллельному порту LРТ1 платы IСРШ86Е, кнопки управления яркостью свечения дисплея и схему регулировки яркости, управляемую через порт LРТ1 платы СРП686Е.5.6 Плата ПП4 источника питания преобразует напряжение бортовой сети в стабилизированные напряжения, необходимые для питания схем блока, а также содержит усилитель для встроенной акустической системы.
Комплект ЗИП
Комплект ЗИП предназначен для оперативного восстановления аппаратуры МСУД в процессе ее эксплуатации. ЗИП может укомплектовыватъся блоками БИ1, поставляемыми в отдельной упаковке. Состав ЗИП определен расчетным путем, исходя из имеющейся информации по надежности покупных комплектующих изделий и надежности технологических процессов, принятых при изготовлении аппаратуры. Состав ЗИП представлен в конструкторской документации и может уточняться по результатам эксплуатации электровозов. На каждые четыре электровоза ЭП1 предусмотрен комплект ЗИП ТЯБК.466943.000-02 или ТЯБК.466943.000-05.
На каждые два электровоза ВЛ80 предусмотрен комплект ТЯБК.466943.000-04 или ТЯБК.466943.000-07.
ЗИП размещен в укладочном ящике, общий вид которого представлен на рисунке 4.
Конструкция аппаратуры
Шкаф МСУД1.2 - напольного крепления с двухсторонним обслуживанием. Общий вид шкафа приведен на рисунке 1. Шкаф состоит из сварного перфорированного каркаса 1 с закрепленными на нем боковыми стенками и съемными передней и задней крышками 2 и 3. Передняя крышка после установки и закрепления также запирается замком 8 и пломбируется пломбами 6. В верхней части передней крышки имеется окно для визуального доступа к индикаторам «Подогрев», отражающим работу подогревающих устройств при низкой температуре окружающей среды и индикаторам «Питание».
На верхней крышке шкафа расположены соединители 10, к которым подключаются кабели внешних связей, а также соединители используемые при проведении наладочных работ и два кронштейна для дополнительного крепления шкафа. Шкаф установлен на промежуточной раме имеющей внешний узел заземления 4. Внутри шкафа размещается двухрядный блочный каркас 7, в котором установлены в направляющих ячейки 9, закрепляемые винтами.
Блок индикации БИ1.2
устанавливается на пульте машиниста. Общий вид блока приведен на рисунке 2. Блок состоит из панели 1, на которой установлены и закреплены дисплей 7, платы 3 и 4, устройство для выдачи речевых сообщений и платы 8, 9, 10 и 11. Панель закрыта кожухом 2, пломбируемым пломбой 6. С лицевой стороны панели расположена клавиатура, индикаторы возможных отказов и тумблер переключения яркости свечения дисплея в зависимости от времени суток. Внутренний монтаж блока выполнен плоскими кабелями. На задней стороне блока установлены соединители 12 и 13 внешних связей. Конструкция блока БИ1.4 аналогична блоку БИ1.2.
Конструкция блока БИ1.6 аналогична блоку БИ1.5.
Программное обеспечение
Микроконтроллеры серии 6010
имеют встроенные программные средства самодиагностики, позволяющие осуществлять проверку портов кода-вывода и устройств памяти. При каждом включении питания или сбросе автоматически выполняется ряд проверок, результаты которых отображается с помощью двухцветного светового индикатора. После включения питания РС микроконтроллера оба светодиода начинают светиться, и индикатор имеет оранжевый цвет. По завершению выдачи га системную консоль начального загрузочного сообщения, светодиод желтого цвета отключается, а светодиод зеленого цвета продолжает светиться. Двухцветный световой индикатор также отражает состояние останова системной памяти. При переводе системной памяти в режим пониженного энергопотребления, прекращает светиться светодиод зеленого цвета и начинает светиться светодиод желтого цвета. При возобновлении функционирования системной памяти прекращает светиться светодиод желтого цвета и начинает светиться светодиод зеленого цвета.
Для загрузки ЦМК
необходимо соединить ЦМК по отладочному каналу с СОМ1 ПЭВМ IВМ РС/АТ. На ПЭВМ войти в директорий SmartLINK и найти файл sl.exe. Нажать " Enter ". На экране должна появиться заставка:
Octagon Systems Corporation
SmartLINK IV (tm)
Copyright © 1986-1993
ОК
Нажать " Enter ". На следующем экране клавишами "стрелка вверх" и "стрелка вниз" выбрать Micro PC-DOS
( ) CAMBASIC
( ) STDBASIC
(*) Micro PC-DOS
ОК
Нажать " Enter ". Включить питание ЦМК. На экране монитора должно пройти начальное загрузочное сообщение, во время которого необходимо нажать клавишу "х". После этого загрузочное сообщение заканчивается командной строкой:
6010 С:\>
Перейти на диск D (статическое ОЗУ), на экране монитора должна появиться строка:
6010 D:\>
Скопировать файл autoexec.bat на диск С. Для этого ввести:
6010 D:\> copy autoexec.bat c:
После подтверждения копирования и получения сообщения, что файл записан, перегрузить ЦМК (выключить и включить питание). Таким образом, в контроллере ЦМК загружено технологическое программное обеспечение.
Чтобы загрузить БИ1
технологическими программами, необходимо соединить отладочным кабелем разъем Х2 блока БИ1 и СОМ1 ПЭВМ ШМ РС/АТ. Включить питание блока БИ1 и дождаться загрузки технологической программы, после чего последовательно нажать клавиши "*"," S ","0","8". На экране блока индикации должно появиться сообщение:
6010С:>remserv c:
Press “Esc” to Exit
(There may be a delay before exit occurs )
На ПЭВМ запустить файл remdisk.exe. Remserv.exe и remdisk.exe входят в комплект сервисных программ, с помощью которых осуществляется связь контроллера с ПЭВМ. При этом remserv.ехе организовывает доступ к одному из дисковых накопителей. Сервер-системы для Клиент-системы, а remdisk.exe обеспечивает доступ к дисковому накопителю удаленной вычислительной системы по последовательному каналу связи через стандартный последовательный порт (УАПП 8250).
Remdisk.exe формирует новое блочное устройство. Клиент-системы, имеющее идентификатор дискового накопителя, в качестве которого REMDISK будет использовать букву, следующую за присвоенной последнему блочному устройству в системном списке. Например, если последний накопитель в системе имеет идентификатор D:, REMDISK сформирует накопитель Е.
Сформированный накопитель имеет свойства реального дискового накопителя, за исключением того, что поток ввода-вывода для него организован через последовательный порт. Когда организована связь, записать в контроллер блока БИ1 новый autoexec.bat, который запускает технологические программы. После копирования разорвать связь, для чего набрать в командной строке: remdisk.exe/u.
Далее необходимо произвести выключение и включение шкафа МСУД1, при этом происходит запуск технологических программ в ЦМК, выбранном МПК и БИ1. При установлении связи шкафа МСУД1 с блоком БИ1 дважды нажать клавишу "МСУД" и проследить на выбранном кадре работу резервного и основного каналов связи. При нормальной работе обоих каналов можно перейти к проверке звуковой сигнализации. Для этого нажать клавишу "выбор кадра" и клавишу "7", при этом должно прозвучать звуковое сообщение "Задана рекуперация" или "Задана тяга". После произведенных вышеперечисленных проверок аппаратура МСУД считается годной к эксплуатации.
Состав аппаратуры МСУД
обеспечивает ее использование в электровозе ЭП1 согласно схеме принципиальной цепей автоматики ИДМБ.661142.004 33.2 и в электровозе ВЛ80 согласно схеме ИДМБ.661142.007 Э3.2.
Техническое обслуживание и ремонт осуществляются в соответствии с видами обслуживания и подразделяются на;
- техническое обслуживание ТО-2;
- текущий ремонт ТР;
- средний ремонт СР;
- капитальный ремонт КР.
2.8.2 При техническом обслуживании ТО-2:
- убедитесь в наличии пломб на дверцах шкафа МСУД 1.2 и крышках блоков БИ1. При нарушении пломб аппаратура МСУД должна подвергнуться контролю в объеме ТР в депо приписки;
- проведите проверку аппаратуры МСУД в объеме ТО-2 в соответствии с ИДМБ.661142.004РЭ или ИДМБ.661142.007 РЭ. Проверку проводите для каждого микроконтроллера ЦМК, МПК1 и МПК2. При обнаружении неполадок в работе аппаратуры причину неисправности необходимо обнаружить и устранить. Неисправную ячейку замените из состава ЗИП;
- при отказе одного из микроконтроллеров МПК1 или МПК2, а также во время движения электровоза допускается следование электровоза основного депо. При этом питание отказавших микроконтроллеров должно быть отключено.
2.8.4 При текущем ремонте ТР:
- проверьте затяжку всех разъемов и при необходимости подтяните крепеж
- проведите проверку аппаратуры МСУД в объеме ТР в соответствии с ИДМБ661142.007 РЭ. Проверку проводите для каждого микроконтроллера ЦМК, МПК1 и МПК2. При наличии бросков тока коря двигателей в тяге или рекуперации замените ячейку ВФС из состава. Неисправную ячейку проверьте на контрольном стенде и восстановите и отправьте для ремонта на завод-изготовитель электровоза.
2.8.5 При среднем ремонте СР:
- отсоедините соединительные кабели от разъемов шкафа МСУД1.2 и -доков БИ1. Снимите двери шкафа МСУД1.2 и крышки блоков БИ1.2;
- аккуратно извлеките из шкафа МСУД1 все ячейки, очистите их от пыли загрязнений, промойте контакты разъемов ячеек спиртом, проверьте со-
стояние печатных плат, надежность пайки и крепления деталей;
- произведите проверку на функционирование и контроль параметров ячеек на контрольном стенде в соответствии с его инструкцией и при необходимости выполните ремонт;
- продуйте чистым сжатым воздухом ниши, монтаж и разъемы шкафа; МСУД, проверьте визуально состояние монтажа шкафа;
- проверьте сопротивление изоляции токоведущих цепей относительно корпуса и между цепями в соответствии с таблицей инструкции контрольного стенда. Сопротивление изоляции должно быть не менее 10 МОм. Контроль сопротивления производите мегомметром на напряжение 500 В;
- продуйте чистым сжатым воздухом ниши и монтаж блоков БИ1, проверьте визуально состояние монтажа блоков БИ1.2и крепления плат;
- проверьте функционирование блоков БИ1.2 в составе контрольного стенда и при необходимости выполните ремонт. При сборке блока БИ1.2 после ремонта все крепежные детали должны быть установлены с применением краски;
- установите в соответствии с маркировкой ячейки в шкаф МСУД 1.2 и закрепите их винтами;
- закройте блоки БИ1.2 крышками, опломбируйте их и установите блоки в пульты машиниста;
- работоспособность неисправной ячейки восстановите в условиях депо приписки или отправьте для ремонта на завод-изготовитель электровоза;
- соедините шкаф МСУД1.2 и блоки БИ1.2 штатными кабелями и выполните проверку аппаратуры МСУД в объеме ТР, после чего установите двери шкафа и опломбируйте аппаратуру.
Выбор микроконтроллера
Общая характеристика
Семейство 16-разрядных микроконтроллеров Infineon (бывший Siemens Semiconductors) C166 содержит кристаллы с различным уровнем периферии и производительности, удовлетворяющие требованиям широкого спектра специфических приложений. Все члены семейства С161, С163, С164-CI, С165, 80С166, и C167 основываются на одной и той же базовой архитектуре и поддерживают единую систему команд (за исключением расширений для новых членов семейства). Это позволяет безболезненно переходить на следующий уровень производительности при реализации более сложного проекта.
Для нашей системы управления мы выбираем микроконтроллер 80С166, он удовлетворяет нашим требованиям, значительно превосходит микроконтроллер фирмы Octagon System 6010 и что не мало важно значительно дешевле. Внешний вид микроконтроллера Siemens 80C166 представлен на рисунке 3.1.

Рисунок 3.1 - Внешний вид микроконтроллера Siemens 80C166
§ Микроконтроллеры (МК) строятся по модульному принципу, предполагающему разделение на три основных системы: ядро центрального процессора, контроллер прерываний и периферийные модули. Обмен данными внутри кристалла организован при помощи четырех внутренних шин:
§ 32-разрядная шина к внутренней памяти программ, обеспечивает считывание двухсловных команд из встроенного ПЗУ за один цикл;
§ две 16-разрядные шины к встроенному двухпортовому регистровому ОЗУ, что позволяет одновременно производить запись и чтение данных;
§ 16-разрядная шина для обмена с периферийными модулями;
§ дополнительная 16-разрядная X-шина, являющаяся внутренним продолжением внешней системной шины, служит для подключения дополнительной памяти и новых периферийных модулей. На рисунке 3.2 представлена структурная схема микроконтроллера.

Рисунок 3.2 – Структурная схема МК
Эффективное программирование МК С166 достигается благодаря мощной системе команд, поддерживающей вычисления над 8-, 16- и 32-разрядными операндами, операции умножения и деления (MUL, DIV), контроль границ стека, управление периферией через регистры специальных функций Special Function Register (SFR). Следует также отметить высокую пропускную способность, мощную систему адресации и поддержку программирования на языке высокого уровня. При тактовой частоте процессора 16, 20 и 25 МГц цикл выполнения команды составляет 125,100 и 80нс соответственно.
Команды С166 можно разделить на следующие основные группы:
§ Преобразования данных: арифметические и логические команды, операции быстрого умножения/деления (0.5/1.0 мкс @ 20МГц), операции сдвигов на 1...15 разрядов за 100 нс, операции с битами во встроенном ОЗУ и регистрах SFR.
§ Пересылки данных: команды MOV со всеми видами адресации, преобразование байта в слово, операции с системным стеком (PUSH, POP) с проверкой на переполнение и стеком пользователя (MOV с автоинкрементом и автодекрементом).
§ Управления программой: команды перехода и вызова и условные переходы по 16 различным условиям (при выполнении условия для перехода требуется только один дополнительный цикл), программные и аппаратные ловушки (Traps), быстрые контекстные переключения за 100 нс.
§ Специальные команды: сокращения энергопотребления и системного управления, непрерываемые последовательности команд, специальные приемы адресации.
Система прерываний
§ Разветвленная схема прерываний C166 с 64 уровнями (16 уровней и на каждом уровне группа из 4 прерываний) обеспечивает гибкое и быстрое
§ задание приоритетов и обслуживание запросов прерываний (рисунок 3.4). В контроллере прерываний предусмотрены аппаратные ловушки (Hardware-Traps) и программные ловушки (Software-Traps), позволяющие обрабатывать ошибки, возникающие при неверном исполнении команд, нарушении границ стека, а также отслеживать немаскируемое прерывание NMI, программный и аппаратный сброс. Приоритеты прерываний от аппаратных и программных ловушек самые высокие.
§ Контроллер прерываний обеспечивает малое время отклика на запрос прерывания: минимальное время составляет 250 нс @20 МГц, а максимальное - 600 нс. Чтобы уменьшить время отклика при выполнении сложных команд умножения и деления, занимающих 5 и 10 циклов соответственно, также предусмотрено прерывание. Обработка прерываний осуществляется в течение малых временных интервалов. Это очень важно для высокоуровневых приложений, таких как управление приводами, когда решаются задачи цифровой обработки сигналов и весьма нежелательны флуктуации входных и выходных переменных. Таким образом, достигается высокая производительность в реальном масштабе времени.
§ Механизм обработки прерываний работает следующим образом. Для каждого прерывания имеется собственный регистр управления Interrupt Control Register (xxIC). При установке одного или нескольких флагов запроса прерывания Interrupt Request (IR) в регистрах управления xxIC производится сравнение их приоритетов с текущим приоритетом выполняемой программы, который содержится в регистре состояния процессора. После проверки номера в группе в регистре прерывания с наибольшим номером уровня и группы очищается флаг IR, и контроллер приступает к обработке этого прерывания. При этом в стеке автоматически сохраняется содержимое регистра состояния процессора PSW, указателя команд IP и в сегментированном режиме указателя сегмента CSP и загружаются новые значения этих регистров согласно
§ процедуре обработки прерывания.

Рисунок 3.4 – Схема прерываний
Регистрация внешних прерываний может осуществляться в альтернативном режиме по внешним входам, например, по входам Capture. Кроме того, имеется немаскируемое прерывание NMI. Часть внешних прерываний регистрируются каждые 0,5 цикла, т.е. каждые 50 нс @ 20 МГц.
§ Изменение уровня приоритета прерывания во время исполнения программы является достаточно типичной задачей для ряда приложений. Например, уровень приоритета может зависеть от значения сигнала на внешнем входе. В этом случае после проверки состояния входа процедура обслуживания прерывания переключает уровень прерывания на более низкий, изменяя содержимое регистра ILVL. После понижения уровня выполняемого прерывания могут поступить запросы на прерывание с более высоким приоритетом. Такая ситуация может привести к определенным проблемам.
Пусть, например, выполняется прерывание A на уровне 10 и поступает запрос от прерывания B с уровнем 12, которое и поступает на выполнение. Если теперь уровень прерывания B будет снижен до значения меньшего, чем 10, прерывание A не сможет стать активным пока не закончится выполнение B. Возможен еще более плохой вариант, если прерывание B снизит свой уровень до значения 5, и теперь даже прерывание C с уровнем 7 сможет его прервать. Такие ситуации
§ удлиняют время исполнения прерывания A, что не соответствует его новому приоритету. Поэтому для понижения уровня приоритета текущего прерывания всегда следует закончить текущую задачу, и начать новую с более низким приоритетом. Это можно осуществить при установке бита IR в каком-либо незадействованном регистре управления xxIC.
§ Контроллер периферийных событий - Peripheral Events Controller (PEC) освобождает ЦПУ от простых, но частых обслуживаний прерываний, осуществляя перенос данных в любую позицию нулевого сегмента без переключения задачи. Процесс переноса данных практически не затрагивает работу контроллера и не зависит от выполняемой программы - контроллер только приостанавливает выполнение текущей программы на один цикл (100 нс), даже не сохраняя свое состояние в стеке. Время отклика контроллера для обслуживания PEC составляет от 150 до 450 нс при цикле ЦПУ 100 нс. Для контроллера PEC отведены два верхних уровня приоритета, что позволяет обслуживать одновременно 8 каналов PEC. Каждый канал управляется собственным регистром PEC, который позволяет программировать передачу байта или слова данных с инкрементом адреса или без него с однократным, многократным или бесконечным числом пересылок. Обработка прерываний PEC выполняется в соответствии с приведенной диаграммой ( рисунок 3.5).
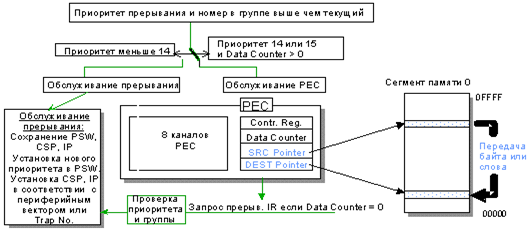
Рисунок 3.5 – Диаграмма прерываний
Генерация системного такта
§ Временной дискретой для ядра C166 является период такта, равный 50 нс при тактовой частоте 20 МГц. Большая часть команд C166 исполняются за два такта, т.е. за 100 нс. Для достижения номинального быстродействия внутренний такт должен иметь скважность 50%, что не всегда может быть получено при тактировании от кварцевого резонатора. При несовпадении длительностей высокого и низкого уровня тактового сигнала временная дискрета определяется по длительности самого короткого уровня, который должен быть не меньше 50 нс. Это означает, что при асимметрии такта понижается максимально возможная тактовая частота. Например, при длительности высокого уровня 50 нс, а низкого - 60 нс рабочая частота равна 18 МГц. Кроме требования симметричности времена переключения уровней тактового сигнала должны быть не более 5 нс.
§ Поэтому для генерации полностью симметричного системного такта в состав некоторых микроконтроллеров семейства C166 входит встроенный делитель входной частоты на 2. В этом случае требуется кварцевый генератор, работающий на частоте 40 МГц. Члены семейства, имеющие в маркировке индекс 'W' не содержат делителя и тактируются непосредственно. Без делителя сегодня выпускаются только кристаллы 8xC166W, с которыми рекомендуется работать на тактовой частоте 18 МГц.
§ В новых кристаллах C163, C164CI, C167 присутствует встроенное устройство PLL, которое преобразует входную частоту во внутренний системный такт с коэффициентом умножения 0.5, 1, 1.5, 2, 2.5, 3, 4 и 5. Например, при использовании кварцевого генератора 5 МГц для достижения обычных 20 МГц на встроенном устройстве PLL осуществляется умножение входной частоты на 4. Задание режима PLL осуществляется на фазе сброса при подключении резистора между входом P0L и нулем. При потере внешнего такта генерируется
§ прерывание, и PLL продолжает работать на частоте 5...10 МГц. Внутренний такт отслеживается PLL также в режимах прямого тактирования и деления входной частоты на 2.
| P0H.7 | P0H.6 | P0H.5 | Коэффиц. умножения | Фактор PLL | Делитель | Комментарий |
| 1 | 1 | 1 | 4 | 4 | OFF | по умолчанию |
| 1 | 0 | 1 | 2 | 2 | OFF | |
| 1 | 1 | 0 | 3 | 3 | OFF | |
| 1 | 0 | 0 | 5 | 5 | OFF | |
| 0 | 1 | 1 | W | OFF | OFF | прямой такт |
| 0 | 0 | 1 | 0.5 | OFF | ON | через делитель |
| 0 | 1 | 0 | 1.5 | 3 | ON | |
| 0 | 0 | 0 | 2.5 | 5 | ON |
ЗАКЛЮЧЕНИЕ
Проведя анализ существующих микропроцессорных устройств управления становится ясно, что они не соответствуют современным требованиям и морально устарели. На сегодняшний день существуют технологии применение которых способно снизить затраты на производство, эксплуатацию и ремонт устройств управления. Одной из них является современный микроконтроллер, включающий в себя все необходимые для выполнения той или иной задачи периферийные модули.
В данной курсовой работе было решено использовать микроконтроллеры фирмы Siemens Semiconductors. Из этого семейства был выбран микроконтроллер 80C166. Эффективное программирование МК 80С166 достигается благодаря мощной системе команд, поддерживающей вычисления над 8-, 16- и 32-разрядными операндами, операции умножения и деления (MUL, DIV), контроль границ стека, управление периферией через регистры специальных функций Special Function Register (SFR). Следует также отметить высокую пропускную способность, мощную систему адресации и поддержку программирования на языке высокого уровня. При тактовой частоте процессора 16, 20 и 25 МГц цикл выполнения команды составляет 125,100 и 80нс соответственно, встроенная память, промышленные температурные диапазоны и др. Кроме того он содержит необходимые для устройств управления встроенные периферийные модули: 10-разрядный АЦП и таймеры.
В результате была усовершенствованна микропроцессорная система управления и диагностики МСУД.
на тему: « Мехатронная система обеспечения заданной скорости электровоза на различных участках пути »
Москва, 2008
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1. Обзор существующих систем управления электровозом
1.1 Блок автоматического управления
1.2 Микропроцессорная система управления и диагностики (МСУД) электровозом ЭП1
2 Объект модернизации
2.1 Преобразователь выпрямительно-инверторный ВИП-5600
2.2 Выпрямительная установка возбуждения ВУВ-118
2.3 Шунтирующие устройства ШУ-001, ШУ-003
2.4 Описание микропроцессорной системы управления и диагностики электровоза (МСУД)
2.5 Ячейки шкафа МСУД
2.6 БлокБИ1.2(БИ1.4)
2.7 Программное обеспечение
2.8 Использование аппаратуры по назначению, техническое обслуживание и текущий ремонт
3 Выбор микроконтроллера
3.1 Общая характеристика
3.2 Четырехступенчатый конвейер команд
3.3 Конфигурирование внешней шины
3.4 Система прерываний
3.5 Генерация системного такта
3.6 Периферия микроконтроллера 80С166
3.7 Аналого-цифровой преобразователь (АЦП)
ЗАКЛЮЧЕНИЕ
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
ВВЕДЕНИЕ
Мехатронная система – это неразделимая совокупность механических, электромеханических и электронных узлов, в которых осуществляется преобразование и обмен энергии, информации. В современных мехатронных системах преобразование движения одного или нескольких тел в требуемые движения других тел осуществляется системой тел (деталей), называемых механизмов. Механизмы входят в состав машин – технических систем и предназначены для осуществления механических движений по преобразованию потоков энергии, силовых взаимодействий, необходимых для выполнения различных рабочих процессов. Часто силовой основой МС является электропривод постоянного и переменного тока, формирующих управляемую электромеханическую систему широкого назначения. Для ЭМС управления характерна тесная взаимосвязь электромеханической части с энергетическим каналом питания и каналом управления, что обуславливает ожидаемые характеристики проектируемого устройства часто в равной степени всеми функциональными звеньями. Управляемые комплексы с электрическим приводом (система, состоящая из двигателя и связанных с ним устройств, приведения в движение одного или нескольких исполнительных механизмов, входящих в состав МС) получили название электромеханических систем (ЭМС).
Создание нового образца МС обычно сопровождается использованием в разнообразных вариантах гибких технологических решений. Разновидностью этого принципа является модульный подход. Модули могут легко соединяться, образуя сложные технические системы, разъединяться, заменяться с целью формирования ТС с другими компонентами и техническими характеристиками при необходимости модернизации и ремонта. В общем случае модуль характеризуется конструктивной и технологической завершенностью, обладает строго фиксированными параметрами (функциональными характеристиками, геометрическими размерами).
Дата: 2019-07-30, просмотров: 420.