Номинальный момент двигателя

Среднепусковой момент электродвигателя трехфазного тока с фазным ротором:

Момент статического сопротивления на валу двигателя при пуске:

где з – КПД механизма передвижения /3,стр. 23/;
U – общее передаточное число механизма передвижения крана (1.7);
Wc –общее сопротивление передвижению крана, Н.
Момент инерции муфты быстроходного вала
 ;
;
где m и D – масса и наибольший диаметр муфты /3, табл.1.36 /.
Момент инерции ротора двигателя и муфты быстроходного вала:
 ;
;
Фактическое время пуска механизма передвижения крана без груза /3,стр.30/
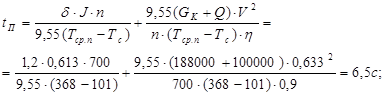
Коэффициент, учитывающий влияние вращающихся масс привода механизма д=1,2.
Фактическое время торможения механизма передвижения крана без груза
Фактическое время торможения механизма передвижения крана без груза
 ;
;
где  – фактическая скорость передвижения крана:
– фактическая скорость передвижения крана:

отличается от ближайшего значения 0,63 м/с из стандартного ряда /3/ на 2,4%, что допустимо.
Общий расчёт противоугонного захвата
Усилия в клещевых захватах
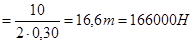
Необходимое число противоугонных захватов

 (2.1)
(2.1)
где Pпр. – усилие сопротивления сдвигу, создаваемое одним противоугонным захватом, Pпр. = 10 ч 50 тонн, принимаем Pпр. = 10 т.
k – коэффициент запаса, k = 1,2 /4, стр. 125/.
Так как на кран устанавливают не менее 2 противоугонных захватов, принимаем n = 2, размещая их по середине балки.
Необходимое усилие нажатия клещей на рельс

 (2.2)
(2.2)
где f1 – коэффициент трения планок клещей о рельс;
f1 = 0,30 (для закалённых губок с насечкой) /4, стр. 126/.
Распорное усилие
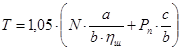 (2.3)
(2.3)
где 1,05 – коэффициент запаса /4, стр. 126/;
 – кпд, учитывающий потери в опорах (шарнирах) клещей,
– кпд, учитывающий потери в опорах (шарнирах) клещей,
= 0,96 (при опорах качения) /4, стр. 126/,
a = 112,5 мм /рис. 2/,
b = 1250 мм /рис. 2/,
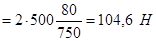
Pп. – усилие в пружине, кН, определяется по формуле:

 (2.4)
(2.4)
где ц – коэффициент запаса нажатия пружины, ц = 1,5 ч 2 /4, стр. 127/,
принимаем ц = 2;
Gр. – вес рычага, кг, принимаем Gр = 50 кг = 500 Н;
е = 80 мм /рис. 3/;
с = 750 мм /рис. 3/;
После подстановки всех параметров в формулу (2.3) получаем

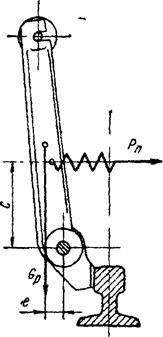
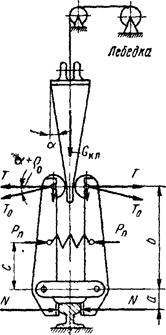
Рис. 2. Схема сил, действующих на клещевой захват
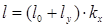
Рис. 3. Схема к определению усилия в пружине
Вес клина
Вес клина определяем по формуле:
 (2.5)
(2.5)
где б – угол наклона рабочей поверхности клина к вертикали, принимаем б = 10° /4, стр. 126/;
ср. – коэффициент сопротивления качению ролика по плоскости клина, ср. = 0,2 (при подшипниках) /4, стр. 127/.
 ;
;
Ход клина
Ход клина влияет на канатоёмкость барабана лебёдки подъёма клина. Ход клина определяется величиной отхода планок клещей от головки рельса и упругим прогибом рычагов. Учитывая неточность стыковки рельсов, отход планок губок принимаем для перегружателей 8 мм.
Общий ход клина /рис. 4/
 (2.6)
(2.6)
где kx – коэффициент запаса хода клина, компенсирующий износ планок, а также неточности изготовления и монтажа, kx = 1,5 /4, стр. 128/;
 – ход клина, определяемый зазором между планкой рычага и рельсом;
– ход клина, определяемый зазором между планкой рычага и рельсом;
 – ход клина, определяемый упругим прогибом рычага клещей;
– ход клина, определяемый упругим прогибом рычага клещей;
Рис. 4. Схема к определению хода клина
Ход клина, определяемый зазором между планкой рычага и рельсом, определяется по формуле:
где  – ход верхнего конца рычага при отходе нижнего конца на величину Д.
– ход верхнего конца рычага при отходе нижнего конца на величину Д.
Ход клина, определяемый упругим прогибом рычага клещей, определяется по формуле:
 ;
;
где  – прогиб верхнего конца рычага под действием усилия T.
– прогиб верхнего конца рычага под действием усилия T.
Тогда общий ход клина:

Механизм подъёма клина
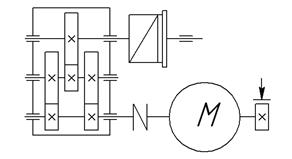
Выбор каната
 (2.7)
(2.7)
где U – кратность полиспаста /рис. 2/, U = 1;
з – к.п.д. полиспаста, з = 1;
Q – вес клина, кг, Q = Gкл = 682,6 кг;
Необходимое разрывное усилие
 ; (2.8)
; (2.8)
где k – коэффициент запаса прочности, k = 4 /2, стр. 55/
Принимаем канат ЛК–З /1, стр. 247/: диаметр каната dк = 8,1 мм; площадь сечения всех проволок F = 24 мм2; разрывное усилие F0 = 31,9 кН.
Выбор барабана
Диаметр барабана
Dб = dк e = 8,1 16 = 130 мм; (2.9)
где e = 16 (для барабана) /1, стр. 250/.
Принимаем диаметр барабана Dб = 130 мм.
Длина барабана
 (2.10)
(2.10)
где Lк – длина каната, Lк = 2,082 м; /2, стр. 60/;
t – шаг витка, мм, t = 10 мм/ 2, стр. 60/;
m – число слоёв навивки, m = 1;
ц – коэффициент не плотности навивки, ц = 0,9 (для гладких барабанов) /2, стр. 60/

Принимаем длину барабана Lб = 60 мм.
Выбор двигателя
Статическая мощность механизма

 (2.11)
(2.11)
где з – к.п.д. механизма, з = 0,97
Vп – скорость подъёма клина, м/сек, Vп. = 0,2 м/сек.
Принимаем двигатель MTF 011–6 /1, стр. 241/ с характеристикой:
мощность N = 1,4 кВт;
число оборотов nд. = 885 об/мин;
максимально развиваемый момент М = 39 Нм;
момент инерции ротора Jр = 0,021 кг·м2;
масса m = 51 кг.
Выбор редуктора
Передаточное число механизма подъёма клина
 (2.12)
(2.12)
где nб – частота вращения барабана, определяется по формуле:
 (2.13)
(2.13)
 Тогда
Тогда
Принимаем редуктор Ц2–250 с передаточным числом равным 31,5 /1, стр. 218/.
Выбор тормоза
Необходимый тормозной момент
 (2.14)
(2.14)
где k – коэффициент запаса, k = 1,5 /2, стр. 66/
Принимаем тормоз ТКГ–160 /1, стр. 284/ с тормозным моментом
Mт =100 Нм.
Выбор муфты
Принимаем муфту упругую втулочно–пальцевую, с номинальным вращающим моментом Мт= 63 Нм, /6, стр. 191/ способную компенсировать незначительные погрешности взаимного расположения соединяемых валов, и смягчать динамические нагрузки.
Дата: 2019-07-24, просмотров: 462.