Курсовой проект
Противоугонный захват козлового крана или перегружателя
Пояснительная записка
Выполнил: студент группы НТ 23-1
Д.В. Иовенко
Проверил: А.Ю. Смолин
Красноярск 2007
Содержание
Введение
1. Общий расчёт механизма передвижения крана
1.1 Сопротивление передвижению крана
1.2 Выбор двигателя
1.3 Выбор редуктора
1.4 Выбор тормоза
1.5 Выбор муфты
1.6 Фактическое время пуска механизма передвижения крана без груза
1.7 Фактическое время торможения механизма передвижения крана
2. Общий расчёт противоугонного захвата
2.1 Усилия в клещевых захватах
2.2 Вес клина
2.3 Ход клина
2.4 Механизм подъёма клина
2.4.1 Выбор каната.
2.4.2 Выбор барабана.
2.4.3 Выбор двигателя
2.4.4 Выбор редуктора
2.4.5 Выбор тормоза
2.4.6 Выбор муфты
3. Расчёт на прочность рычага противоугонного захвата
Список используемых источников
Введение
По заданию в данном проекте был разработан противоугонный захват с клиновым механизмом замыкания клещей, который предназначен для удержания крана на рельсах в нерабочем состоянии от силы ветра. Данное автоматическое противоугонное устройство является наиболее простым и надёжным, в то же время это одно из наиболее важных элементов крана. Они регламентированы рядом обязательных нормативных документов. При использовании машинного привода предусматривается возможность приведения в действие устройств вручную или должны устанавливаться ручные дополнительные захваты или стопоры.
Устанавливаются противоугонные захваты на нижних ригелях опор крана, захват осуществляется, как правило, за головки рельсов.
Общий расчёт механизма передвижения крана
Параметры прототипа крана:
грузоподъёмность Q = 100 тонн;
скорость передвижения крана Vпер = 0,653 м/сек;
высота подъёма H = 18 м;
режим работы – 4М;
вес крана Gк = 193,2 тонн.
Принимаем схему балансиров перегружателя с 4 колёсами на одном рельсе и с четырёхрельсовым ходом (рис. 1.)
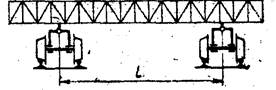
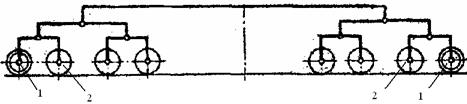
Рис. 1. Схема четырёхколёсных балансиров перегружателей:1 – приводное колесо; 2 – неприводное колесо
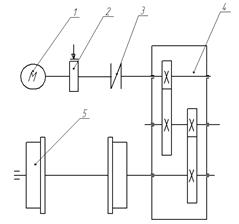
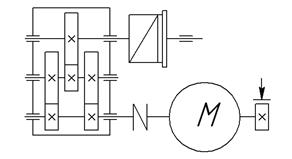
Рисунок 1.1. Кинематическая схема передвижения крана.
1- двигатель, 2- тормоз, 3- муфта, 4- редуктор, 5- колесо.
Выбор двигателя
Статическая мощность механизма:
 (1.6)
(1.6)
где з – к.п.д. механизма, з = 0,9
Мощность одного двигателя:

где m – число двигателей механизма передвижения, принимаем 4.
Принимаем двигатель MTF 411–8 /1, с. 241/ с характеристикой:
мощность N = 18 кВт, число оборотов nд. = 700 об/мин,
максимально развиваемый момент М = 569 Нм,
момент инерции ротора Jр. = 0,537 кг·м2;
масса m = 280 кг.
Выбор редуктора
Передаточное число механизма передвижения
 (1.7)
(1.7)
где nкол – частота вращения колеса, определяется по формуле
 (1.8)
(1.8)
Тогда
Принимаем четыре редуктора ВКУ–610М с передаточным числом равным 40 /4, стр. 300/.
Выбор тормоза
Необходимый тормозной момент
 (1.9)
(1.9)
где Gп. – вес крана без груза, кН, Gп. = 1879,6 кН;
mпр. – приведённая масса, кН·с2/м·т, mпр = 1147,7 кН·с2/м·т /5, стр. 117/;
a – замедление при торможении, м/с2, a = 0,1 м/с2 /5, стр. 117/;
cто – удельное сопротивление движению от сил трения,
cто = 0,7 /5, стр. 116/.

Необходимый тормозной момент одного тормоза
 (1.10)
(1.10)
где m – число тормозов механизмов передвижения
Выбираем тормоз ТКГ–200 /1, стр. 284/ с тормозным моментом Mот = 300 Нм.
Выбор муфты
Принимаем муфту упругую втулочно–пальцевую, с номинальным вращающим моментом Мт = 500 Нм /7, с. 190/, способную компенсировать незначительные погрешности взаимного расположения соединяемых валов, и смягчать динамические нагрузки.
Усилия в клещевых захватах
Необходимое число противоугонных захватов

 (2.1)
(2.1)
где Pпр. – усилие сопротивления сдвигу, создаваемое одним противоугонным захватом, Pпр. = 10 ч 50 тонн, принимаем Pпр. = 10 т.
k – коэффициент запаса, k = 1,2 /4, стр. 125/.
Так как на кран устанавливают не менее 2 противоугонных захватов, принимаем n = 2, размещая их по середине балки.
Необходимое усилие нажатия клещей на рельс

 (2.2)
(2.2)
где f1 – коэффициент трения планок клещей о рельс;
f1 = 0,30 (для закалённых губок с насечкой) /4, стр. 126/.
Распорное усилие
 (2.3)
(2.3)
где 1,05 – коэффициент запаса /4, стр. 126/;
 – кпд, учитывающий потери в опорах (шарнирах) клещей,
– кпд, учитывающий потери в опорах (шарнирах) клещей,
= 0,96 (при опорах качения) /4, стр. 126/,
a = 112,5 мм /рис. 2/,
b = 1250 мм /рис. 2/,
Pп. – усилие в пружине, кН, определяется по формуле:

 (2.4)
(2.4)
где ц – коэффициент запаса нажатия пружины, ц = 1,5 ч 2 /4, стр. 127/,
принимаем ц = 2;
Gр. – вес рычага, кг, принимаем Gр = 50 кг = 500 Н;
е = 80 мм /рис. 3/;
с = 750 мм /рис. 3/;
После подстановки всех параметров в формулу (2.3) получаем

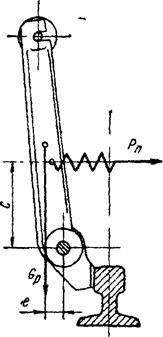
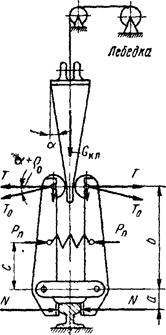
Рис. 2. Схема сил, действующих на клещевой захват
Рис. 3. Схема к определению усилия в пружине
Вес клина
Вес клина определяем по формуле:
 (2.5)
(2.5)
где б – угол наклона рабочей поверхности клина к вертикали, принимаем б = 10° /4, стр. 126/;
ср. – коэффициент сопротивления качению ролика по плоскости клина, ср. = 0,2 (при подшипниках) /4, стр. 127/.
 ;
;
Ход клина
Ход клина влияет на канатоёмкость барабана лебёдки подъёма клина. Ход клина определяется величиной отхода планок клещей от головки рельса и упругим прогибом рычагов. Учитывая неточность стыковки рельсов, отход планок губок принимаем для перегружателей 8 мм.
Общий ход клина /рис. 4/
 (2.6)
(2.6)
где kx – коэффициент запаса хода клина, компенсирующий износ планок, а также неточности изготовления и монтажа, kx = 1,5 /4, стр. 128/;
 – ход клина, определяемый зазором между планкой рычага и рельсом;
– ход клина, определяемый зазором между планкой рычага и рельсом;
 – ход клина, определяемый упругим прогибом рычага клещей;
– ход клина, определяемый упругим прогибом рычага клещей;
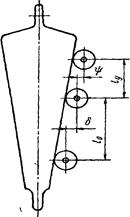
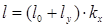
Рис. 4. Схема к определению хода клина
Ход клина, определяемый зазором между планкой рычага и рельсом, определяется по формуле:
где  – ход верхнего конца рычага при отходе нижнего конца на величину Д.
– ход верхнего конца рычага при отходе нижнего конца на величину Д.
Ход клина, определяемый упругим прогибом рычага клещей, определяется по формуле:
 ;
;
где  – прогиб верхнего конца рычага под действием усилия T.
– прогиб верхнего конца рычага под действием усилия T.
Тогда общий ход клина:

Механизм подъёма клина
Выбор каната
 (2.7)
(2.7)
где U – кратность полиспаста /рис. 2/, U = 1;
з – к.п.д. полиспаста, з = 1;
Q – вес клина, кг, Q = Gкл = 682,6 кг;
Необходимое разрывное усилие
 ; (2.8)
; (2.8)
где k – коэффициент запаса прочности, k = 4 /2, стр. 55/
Принимаем канат ЛК–З /1, стр. 247/: диаметр каната dк = 8,1 мм; площадь сечения всех проволок F = 24 мм2; разрывное усилие F0 = 31,9 кН.
Выбор барабана
Диаметр барабана
Dб = dк e = 8,1 16 = 130 мм; (2.9)
где e = 16 (для барабана) /1, стр. 250/.
Принимаем диаметр барабана Dб = 130 мм.
Длина барабана
 (2.10)
(2.10)
где Lк – длина каната, Lк = 2,082 м; /2, стр. 60/;
t – шаг витка, мм, t = 10 мм/ 2, стр. 60/;
m – число слоёв навивки, m = 1;
ц – коэффициент не плотности навивки, ц = 0,9 (для гладких барабанов) /2, стр. 60/

Принимаем длину барабана Lб = 60 мм.
Выбор двигателя
Статическая мощность механизма

 (2.11)
(2.11)
где з – к.п.д. механизма, з = 0,97
Vп – скорость подъёма клина, м/сек, Vп. = 0,2 м/сек.
Принимаем двигатель MTF 011–6 /1, стр. 241/ с характеристикой:
мощность N = 1,4 кВт;
число оборотов nд. = 885 об/мин;
максимально развиваемый момент М = 39 Нм;
момент инерции ротора Jр = 0,021 кг·м2;
масса m = 51 кг.
Выбор редуктора
Передаточное число механизма подъёма клина
 (2.12)
(2.12)
где nб – частота вращения барабана, определяется по формуле:
 (2.13)
(2.13)
 Тогда
Тогда
Принимаем редуктор Ц2–250 с передаточным числом равным 31,5 /1, стр. 218/.
Выбор тормоза
Необходимый тормозной момент
 (2.14)
(2.14)
где k – коэффициент запаса, k = 1,5 /2, стр. 66/
Принимаем тормоз ТКГ–160 /1, стр. 284/ с тормозным моментом
Mт =100 Нм.
Выбор муфты
Принимаем муфту упругую втулочно–пальцевую, с номинальным вращающим моментом Мт= 63 Нм, /6, стр. 191/ способную компенсировать незначительные погрешности взаимного расположения соединяемых валов, и смягчать динамические нагрузки.
Курсовой проект
Противоугонный захват козлового крана или перегружателя
Пояснительная записка
Выполнил: студент группы НТ 23-1
Д.В. Иовенко
Проверил: А.Ю. Смолин
Красноярск 2007
Содержание
Введение
1. Общий расчёт механизма передвижения крана
1.1 Сопротивление передвижению крана
1.2 Выбор двигателя
1.3 Выбор редуктора
1.4 Выбор тормоза
1.5 Выбор муфты
1.6 Фактическое время пуска механизма передвижения крана без груза
1.7 Фактическое время торможения механизма передвижения крана
2. Общий расчёт противоугонного захвата
2.1 Усилия в клещевых захватах
2.2 Вес клина
2.3 Ход клина
2.4 Механизм подъёма клина
2.4.1 Выбор каната.
2.4.2 Выбор барабана.
2.4.3 Выбор двигателя
2.4.4 Выбор редуктора
2.4.5 Выбор тормоза
2.4.6 Выбор муфты
3. Расчёт на прочность рычага противоугонного захвата
Список используемых источников
Введение
По заданию в данном проекте был разработан противоугонный захват с клиновым механизмом замыкания клещей, который предназначен для удержания крана на рельсах в нерабочем состоянии от силы ветра. Данное автоматическое противоугонное устройство является наиболее простым и надёжным, в то же время это одно из наиболее важных элементов крана. Они регламентированы рядом обязательных нормативных документов. При использовании машинного привода предусматривается возможность приведения в действие устройств вручную или должны устанавливаться ручные дополнительные захваты или стопоры.
Устанавливаются противоугонные захваты на нижних ригелях опор крана, захват осуществляется, как правило, за головки рельсов.
Общий расчёт механизма передвижения крана
Параметры прототипа крана:
грузоподъёмность Q = 100 тонн;
скорость передвижения крана Vпер = 0,653 м/сек;
высота подъёма H = 18 м;
режим работы – 4М;
вес крана Gк = 193,2 тонн.
Принимаем схему балансиров перегружателя с 4 колёсами на одном рельсе и с четырёхрельсовым ходом (рис. 1.)
Рис. 1. Схема четырёхколёсных балансиров перегружателей:1 – приводное колесо; 2 – неприводное колесо
Рисунок 1.1. Кинематическая схема передвижения крана.
1- двигатель, 2- тормоз, 3- муфта, 4- редуктор, 5- колесо.
Дата: 2019-07-24, просмотров: 408.