Электроприводом называется электромеханическое устройство, предназначенное для электрификации и автоматизации рабочих процессов.
Электропривод состоит из преобразующего, электродвигательного, передаточного и управляющего устройств.

Электроснабжение — совокупность мероприятий по обеспечению электроэнергией потребителей.
Основной задачей электропривода является приведение в движение рабочего органа производственного механизма по определенному закону. Закон изменения параметров электрического привода зависит от технологического процесса, выполняемого производственным механизмом, для которого данный электрический привод используется.
Различают 3 режима работы электродвигателей:
1) Длительный режим:
При постоянной нагрузке температура перегрева двигателя τ постепенно достигает установившегося значения, при котором двигатель может работать неограниченно долгое время.
При переменной нагрузке температура двигателя колеблется, но но приблизительно может считаться неизменной.

2) Кратковременный режим. В этом режиме двигатель работает ограниченное время tk, в течение которого температура перегрева τ не успевает достигнуть установившегося значения. За время отключения двигатель охлаждается до температуры окружающей среды.
3) Повторно-кратковременный режим. Время нагрузки tp (время работы) чередуется с паузами tп. За время нагрузки температура перегрева не успевает достигнуть установившегося значения, а за время паузы двигатель не успевает полностью охладиться. Через определенное число циклов среднее значение температуры достигает некоторого установившегося значения.

Выбор электродвигателя и кинематический расчет привода выполняются в следующей последовательности:
1. Определяют общий КПД привода по формуле: hобщ = h1 · h2 ·h3 … hn
2. Производят подбор электродвигателя по потребной мощности 
3. Определяют общие передаточные числа приводов 
4. Производят разбивку по ступеням одного или нескольких полученных значений uобщ так, чтобы выполнялось условие 
5. Исключают из дальнейшего рассмотрения те из электродвигателей, при использовании которых передаточные числа передач выйдут за пределы рекомендуемых значений.
Управление электроприводами предусматривает операции пуска, торможения, регулирования скорости, реверсирования, а также поддержание заданного режима работы привода в соответствии с требованиями технологического процесса и может быть ручным, полуавтоматическим и автоматическим.
· При ручном управлении все операции осуществляет оператор с помощью рубильников, контроллеров, реостатов, находящихся у рабочей машины. При использовании контакторов, магнитных пускателей, кнопок, управление осуществляется дистанционно. Ручное управление не позволяет полностью использовать возможности электропривода из-за больших затрат времени на переключения, что привело к созданию систем полуавтоматического и автоматического управления.
· При полуавтоматическом управлении начальные и конечные операции выполняет оператор, а остальное происходит автоматически.
· Автоматическое управление электроприводом осуществляется без непосредственного участия человека, его функции сводятся к подаче первоначального импульса и обеспечивает рост производительности труда, повышение качества продукции, снижает расход электроэнергии, повышает надежность работы машин.
Требования к пусковой и защитной аппаратуре электродвигателей. Нагрев и охлаждение двигателей. Механические и электромеханические характеристики двигателей.
Требования к пусковой и защитной аппаратуре электродвигателей:
· напряжение и номинальный ток аппаратов должны соответствовать напряжению и расчетному (длительному) току цепи;
· номинальные токи плавких вставок предохранителей и расцепителей автоматических выключателей нужно выбирать, по возможности, близкими к расчетным токам электроприемника или линии;
· аппараты защиты не должны отключать установку при перегрузках, возникающих в условиях нормальной эксплуатации, например при запуске короткозамкнутого электродвигателя;
При выборе пусковой и защитной аппаратуры учитывают условия окружающей среды, номинальный ток аппарата, разрывную мощность его контактов, частоту включений, допустимое значение тока короткого замыкания в защищаемых цепях и другие требования, предъявляемые к работе аппарата.
При работе любого электродвигателя часть поступающей к тему энергии затрачивается на потери, связанные с нагревом обмоток и магнитопроводов, трением в подшипниках и вращающихся частей о воздух. Хотя потери энергии в современных электродвигателях невелики, при их работе все же выделяется значительное количество тепла, что приводит к нагреву электродвигателей. Различают постоянные и переменные потери в электрических машинах.
На холостом ходу нагрев машин определяется постоянными потерями. По мере загрузки машины увеличиваются переменные потери и нагрев ее повышается.
Для максимального использования (по тепловым возможностям) всех применяемых в электродвигателе материалов необходимо, чтобы при полной нагрузке его отдельные части нагревались до температур, близких к предельно допустимым. С этой же целью используется искусственное охлаждение электродвигателей, позволяющее большую часть выделяющегося при работе машины тепла отдавать окружающей среде.
Двигатель в процессе охлаждения, стремится к температуре окружающей среды – этот период может быть очень длительным. Для практических целей считают двигатель остывшим полностью, если его температура отличается от температуры окружающей среды не более чем на 3.
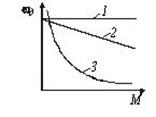
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента ω = f(M).Здесь следует иметь ввиду, что момент М на валу двигателя независимо от направления вращения имеет положительный знак - момент движущий. Вместе с тем момент сопротивления Мс имеет знак отрицательный.
В качестве примеров на рис. приведены механические характеристики: 1 - синхронного двигателя; 2 – двигателя постоянного тока независимого возбуждения; 3 – двигателя постоянного тока последовательного возбуждения.
Электромеханической характеристикой двигателя постоянного тока называется зависимость скорости вращения от тока якоря.
Если подать напряжение на обмотку якоря при отсутствии тока на обмотке возбуждения, то магнитный поток будет равен нулю, а скорость будет стремиться к бесконечности. Такое явление называется разносом двигателя. Чтобы избежать разноса двигателя используются электродвигатели с параллельным возбуждением.
Дата: 2019-07-24, просмотров: 310.