Как было указано выше (раздел 1.1), оптимальной траекторией называют траекторию x( t), по которой фазовая точка за кратчайшее время переходит из состояния x0 в состояние x1. Такой переход будет осуществляться при приложении оптимального управления. Оптимальным управление будет при движении по граням (границам) области управления в пространстве управлений. Для данной задачи, областью управления является прямоугольник (рисунок 2.9). Таким образом, управления будут представлять собой константные и линейно-нарастающие воздействия.
Для построения оптимальных траекторий необходимо найти решение математического выражения, с помощью которого описывается объект управления. В данном случае это авторегрессионно-регрессионная модель. Есть несколько способов решения данного уравнения: численный и аналитический. Численное решение удобно для применения ЭВМ, но имеет один недостаток. Так как решение имеет итерационный характер, то в процессе вычислений с каждым шагом накапливается ошибка. Аналитическое решение не страдает указанным недостатком и является более универсальным и точным по сравнению с численным, но в данном случае проблемы сопряжены с поиском решения.
Из теории линейных разностных уравнений известно, что общий вид аналитического решения для выражения (2.8) имеет вид:
 (2.17)
(2.17)
где  — общее решение линейного неоднородного разностного уравнения,
— общее решение линейного неоднородного разностного уравнения,  — общее решение линейного однородного разностного уравнения,
— общее решение линейного однородного разностного уравнения,  — частное решение линейного неоднородного разностного уравнения. Более подробно выражение (2.17) можно записать в виде:
— частное решение линейного неоднородного разностного уравнения. Более подробно выражение (2.17) можно записать в виде:
 (2.18)
(2.18)
где m — порядок авторегрессии;  — константы, определяемые из начальных условий;
— константы, определяемые из начальных условий;  — корни характеристического уравнения (2.19) для исходного разностного уравнения (2.8),
— корни характеристического уравнения (2.19) для исходного разностного уравнения (2.8),  — коэффициенты авторегрессионно-регрессионной модели (2.8). [6]
— коэффициенты авторегрессионно-регрессионной модели (2.8). [6]
 (2.19)
(2.19)
где m — порядок авторегрессии. Для третьего порядка авторегрессии, выражение (2.18) будет иметь вид:
 (2.20)
(2.20)
 (2.21)
(2.21)
Подставим в выражения (2.20) и (2.21) коэффициенты модели (2.13). После подстановки выражения будут иметь вид:
 (2.22)
(2.22)

Для нахождения общего вида аналитического решения уравнения (2.13) необходимо найти корни характеристического уравнения (2.22) и коэффициенты ci выражения (2.21).
При нахождении корней характеристического уравнения (2.22) удобно воспользоваться функцией roots математического пакета MatLab. В результате расчетов были получены следующие значения:
Так как в результате вычислений был получен комплексно-сопряженный корень, то данное аналитическое решение является не удобным для использования в алгоритме и далее вычисления будут проводиться численными методами. Ниже приведены построенные оптимальные траектории в пространстве управлений. Эти траектории построены с учетом ограничений налагаемых на управление. Ограничения имеют вид системы (2.16). Таким образом, были построены траектории, соответствующие константному значению управляющего параметра и линейно-нарастающему.
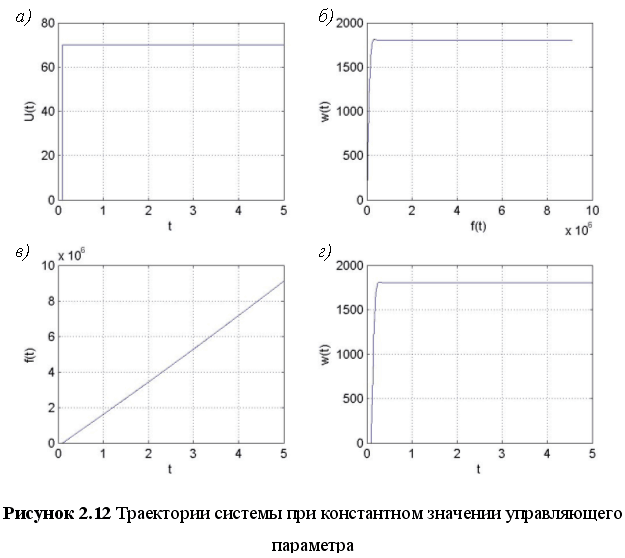
На рисунке 2.12 представлены траектории системы соответствующие константному значению управляющего параметра без учета ограничения на скорость. На графике 2.12, а представлен график управления, на графике 2.12, б — траектория системы в пространстве фазовых координат системы (jt, w t), на графике 2.12, в — траектория системы в базисе (t, jt), на графике 2.12, г — траектория системы в базисе (t, wt).
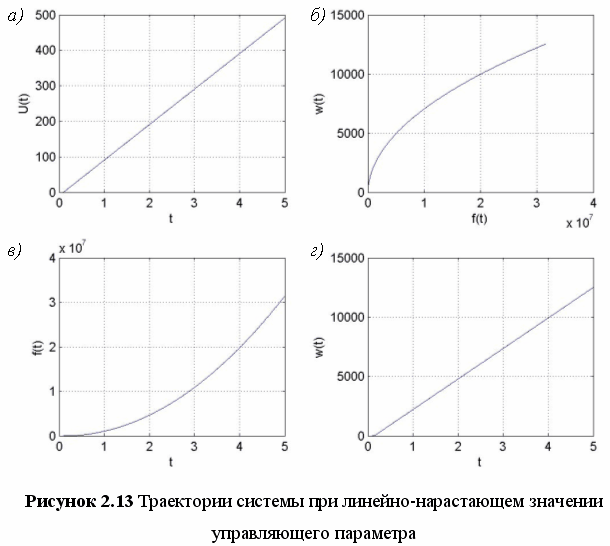
На рисунке 2.13 представлены траектории системы соответствующие линейно-нарастающему значению управляющего параметра без учета ограничения на значение параметра. На графике 2.13, а представлен график управления, на графике 2.13, б — траектория системы в пространстве фазовых координат системы (jt, w t), на графике 2.13, в — траектория системы в базисе (t, jt), на графике 2.13, г — траектория системы в базисе (t, wt).
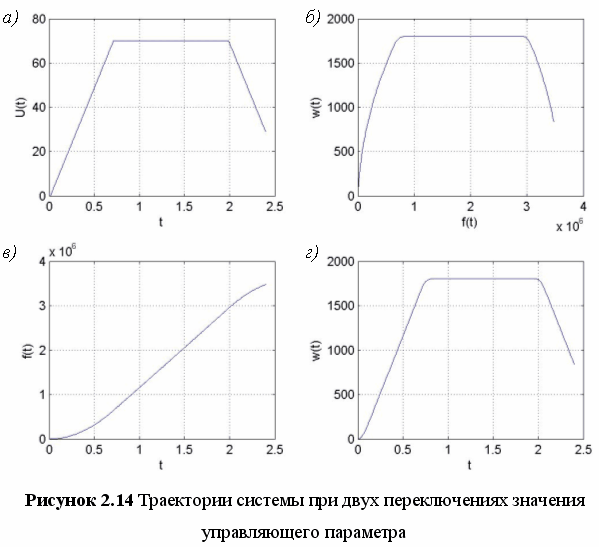
В процессе работы системы, управляющий параметр будет иметь несколько моментов переключения. В качестве иллюстрации этого случая приведен рисунок 2.14.
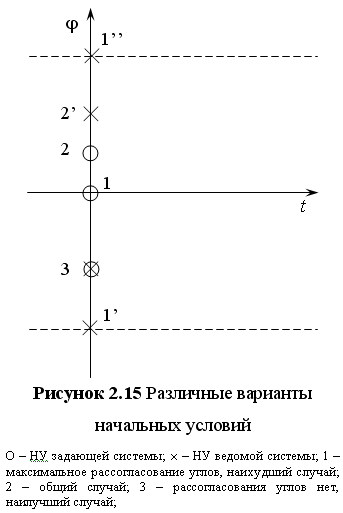
Движение системы при оптимальном управлении определяется начальными условиями. Рассмотрим начальные условия в базисе (t, jt). Для данной системы максимальный угол рассогласования не может превышать 180°, по модулю. Таким образом, в базисе (t, jt) необходимо выделить ограничения –p, +p, которые представляют собой горизонтальную полосу, внутри которой и будут располагаться точка, соответствующая начальному значению фазовой координаты j. На рисунке 2.15, показаны несколько вариантов начальных условий.
В зависимости от начальных условий, в базисе (jt, wt) будет существовать множество траекторий. При различных углах в начальных условиях, траектории будут располагаться по горизонтали.
Как говорилось при постановке задачи, данная проблема решается в базисе ошибок. Для перехода в базис ошибок необходимо воспользоваться выражением (1.13):
Это выражение переводит множество траекторий из базиса (jt, wt), в базис ошибок.
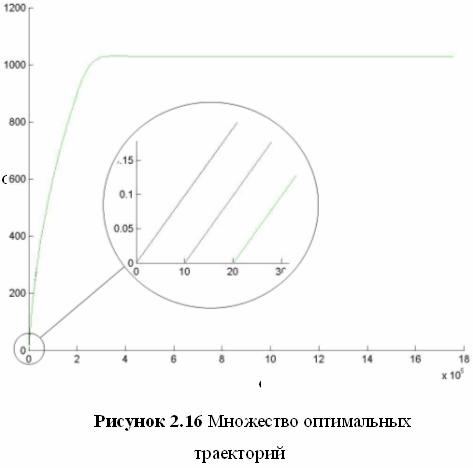
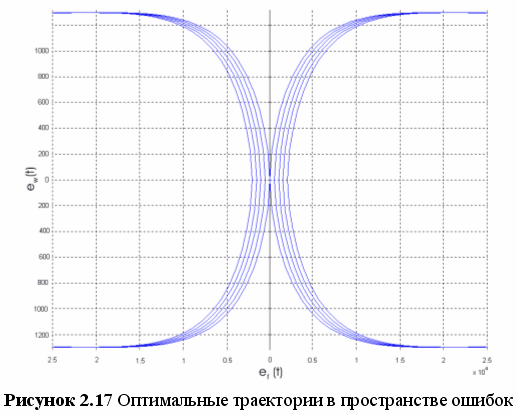
На рисунке 2.16 изображено множество оптимальных траекторий в базисе (jt, wt), а на рисунке 2.17 изображены те же траектории в базисе ошибок. Положение траекторий в базисе ошибок зависит от начальной ошибки по обеим фазовым координатам, то есть от угла рассогласования и разности скоростей.
При различных начальных углах оптимальные траектории будут распределяться по горизонтали. На рисунке 2.16 показаны три траектории с начальными углами 0°, 10° и 20°. В указанных случаях, начальная скорость равна нулю.
При различных начальных скоростях, траектории будут иметь идентичный вид, но начальной точкой движения будет точка не лежащая на оси абсцисс.
Анализ решений
Для последующего анализа решений в базисе ошибок, необходимо рассмотреть несколько вариантов начальных условий. Для этого необходимо разбить пространство ошибок на характерные подпространства.
Так как угол рассогласования не может превышать угла в 180°, то и ошибка не может превышать этого значения. Таким образом, в базисе ошибок можно выделить вертикальную полосу шириной 2p ([–p, +p]), за границы которой ошибка по углу не может выходить. На самом деле, если ошибка  превышает значение p, то угол рассогласования рассчитывается как показано ниже:
превышает значение p, то угол рассогласования рассчитывается как показано ниже:
 (2.23)
(2.23)
где  — новое значение ошибки, не превышающее p.
— новое значение ошибки, не превышающее p.
Следует также упомянуть следующее: при положительной ошибке начальная точка будет находиться справа от оси ординат, а при положительной ошибке  — выше оси абсцисс.
— выше оси абсцисс.
Так как управление имеет ограничение на величину, то величина скорости вращения вала системы не будет превышать некоторого максимального установившегося значения. Таким образом, величина ошибки  тоже не будет превышать некоторого максимального значения, определяемого максимальной скоростью системы и равной
тоже не будет превышать некоторого максимального значения, определяемого максимальной скоростью системы и равной  . Из этого следует, что в базисе ошибок необходимо выделить горизонтальную полосу шириной
. Из этого следует, что в базисе ошибок необходимо выделить горизонтальную полосу шириной  (
(  ), за границы которой ошибка по скорости не может выходить.
), за границы которой ошибка по скорости не может выходить.
Таким образом, в пространстве ошибок выделена прямоугольная область допустимых значений ошибок. Все движения будут происходить именно в этой области.
На рисунке 2.17 показаны оптимальные траектории в пространстве ошибок. Выделим из всего множества траекторий две, приводящие в ноль. Будем называть эти траектории главными. У левой главной траектории выделим верхнюю ветвь, а у правой — нижнюю. Движение по этим ветвям приводит в начало координат. Так как в разделе 1.4 была поставлена задача (1.12), то эти две ветви необходимо выделить особо, так как при движении по ним выполняется первое условие задачи (1.12).
Указанные выше ветви главных траекторий делят область ошибок на два подпространства P и Q. Анализ этих подпространств делается ниже.

Вокруг начала координат ограничим некоторую область S. Данная область соответствует такому положению системы, при котором управление необходимое для коррекции этой ошибки не будет превышать своего максимального значения, то есть не будет нарушаться первое выражение системы (1.13). В графической интерпретации, в пространстве управлений движение будет происходить по горизонтальным границам (рисунок 2.7). Верхняя и нижняя ветки главных траекторий разбивают пространство S на два подпространства — S1 и S2.
Таким образом, были построены четыре подпространства в пространстве ошибок, которые изображены на рисунке 2.18.
Количество точек переключения и вид управления зависит от начальных условий. Рассмотрим различные варианты начальных условий:
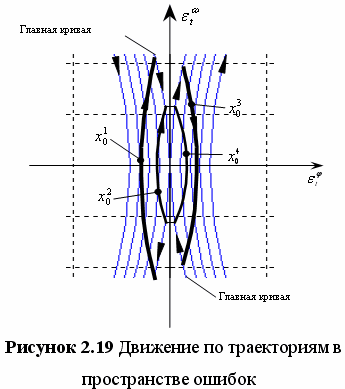
1) система находится в точке лежащей в плоскости P (точка  на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить по траектории, состоящей из двух кривых, то есть траектория будет иметь два интервала постоянства; этому движению соответствует управление с тремя точками переключения (рисунок 2.20, участок 1);
на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить по траектории, состоящей из двух кривых, то есть траектория будет иметь два интервала постоянства; этому движению соответствует управление с тремя точками переключения (рисунок 2.20, участок 1);
2) система находится в точке лежащей в плоскости S1 (точка  на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить также по двум кривым, то есть траектория будет иметь два интервала постоянства; но этому движению соответствует управление с двумя точками переключения (рисунок 2.20, участок 2);
на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить также по двум кривым, то есть траектория будет иметь два интервала постоянства; но этому движению соответствует управление с двумя точками переключения (рисунок 2.20, участок 2);

3) в случае когда система находится в подпространстве Q, движение будет иметь такое же количество интервалов постоянства и точек переключения как и случай 1, но знак управляющего параметра изменится на противоположный (рисунок 2.19, точка  , рисунок 2.20, участок 3);
, рисунок 2.20, участок 3);
4) в случае когда система находится в подпространстве S2, движение будет иметь такое же количество интервалов постоянства и точек переключения как и случай 2, но знак управляющего параметра изменится на противоположный (рисунок 2.19, точка  , рисунок 2.20, участок 4);
, рисунок 2.20, участок 4);
Т. о. данные траектории являются решением задачи об оптимальном быстродействии и задача сводится к нахождению моментов времени переключений управляющего параметра U.
При определении моментов точек переключения можно использовать как аналитические выражения, так и численные методы. При определении моментов точек переключения аналитически необходимо решить систему уравнений вида (2.18) для частного случая, где одно из уравнений написано для кривой, являющейся главной траекторией, а другое — для кривой, проходящей через точку, в которой находится система в данный момент и пересекающую главную траекторию, описанную первым уравнением системы. Общий вид системы приведен ниже:

В том случае, если аналитические выражения не удовлетворяют требованиям, предъявленным к алгоритму в разделе 1.3, точки переключения необходимо искать численными методами.
Как уже было сказано выше, численные методы имеют итерационный характер, и не обладают высокой точностью.
Дата: 2019-07-24, просмотров: 420.