Идентификация динамической системы заключается в отыскании математических моделей, поведение которых подобно поведению самой системы (объекта). Модель объекта необходима для синтеза законов управления, так как управление определяется в результате анализа прогноза поведения объекта.
При использовании в качестве модели объекта АРРМ предполагается, что объект является линейным (хотя бы для рассматриваемых режимов работы) или допускает линейное описание. Реальные же объекты являются нелинейными.
Для идентификации необходимо выбрать порядок модели (ее вид), а затем идентифицировать ее параметры (коэффициенты). Вид модели определяется экспериментально, из заданного списка возможных моделей. Для каждой из них идентифицируются параметры, и оценивается ее точность. На основании анализа точности описания и сложности модели делается вывод о ее пригодности. Таким образом, в общем случае, процесс выбора модели и идентификации параметров является циклическим процессом.
Для описания данной электромеханической системы будем использовать АРРМ, имеющую вид (2.2).
На начальном этапе необходимо выбрать порядок авторегрессионно-регрессионной модели. Для достижения этой цели проводился эксперимент, в котором циклически проводился подбор порядка модели с определением точности полученной на каждом шаге модели, исходя из реальных экспериментально полученных данных. Поиск подходящего порядка модели проводился в диапазоне p = 0..20.
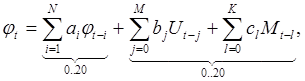
В результате была найдена модель, удовлетворяющая требованиям точности, порядок которой составляет (3, 3). Общий вид АРРМ объекта (электромеханической системы) представлен ниже:
 (2.6)
(2.6)
Если за основу взять выражение (2.3), то конечная АРРМ будет иметь вид:
 (2.7)
(2.7)
В режиме холостого хода, когда момент М на валу двигателя равен нулю (т.е.  ), выражения (2.6) и (2.7) примут вид:
), выражения (2.6) и (2.7) примут вид:
 (2.8)
(2.8)
 (2.9)
(2.9)
Однако перед окончательным выбором вида математической модели, следует упомянуть следующий факт: особенностью рассматриваемой системы является то, что тормозящий момент на валу электропривода имеет константный характер так как обусловлен, как говорилось в разделе 2.1, силами трения, а также, так называемой, ветровой нагрузкой, которая симметрично действует и на разгон и на торможение. Таким образом тормозящий момент существует и равен некоторому константному значению, а следовательно он будет учитываться при идентификации системы автоматически.
Таким образом, первый этап идентификации, на котором был определен порядок модели, выполнен. Далее будут использоваться выражения (2.8) и (2.9).
Вторым этапом идентификации является нахождение численных значений параметров авторегрессионно-регрессионной модели:  , которые по своему смыслу являются весовыми коэффициентами.
, которые по своему смыслу являются весовыми коэффициентами.
Нахождение численных значений параметров модели будем производить с помощью метода наименьших квадратов (МНК). В результате применения метода МНК будет получен вектор оценочных значений параметров модели. Суть МНК заключается в минимизации суммы квадратов ошибок исходных уравнений (2.8) для данного набора фазовых координат динамической системы.
Для идентификации параметров необходимо наблюдать входные и выходные фазовые координаты системы. Для нашей системы, как упоминалось выше, входной координатой является Ut, выходной координатой — jt. Данные наблюдений заносятся в таблицу (таблица 2.1):
Таблица 2.1 Исходные данные для идентификации
|
| |||||
| t | j t | j t-1 | j t-2 | j t-3 | Ut |
| 1 | j 0 | — | — | — | U0 |
| 2 | j 1 | j 0 | — | — | U1 |
| 3 | j 2 | j 1 | j 0 | — | U2 |
| 4 | j 3 | j 2 | j 1 | j 0 | U3 |
| 5 | j 4 | j 3 | j 2 | j 1 | U4 |
| … | … | … | … | … | … |
| t | jt | jt–1 | jt–2 | jt–3 | Ut |

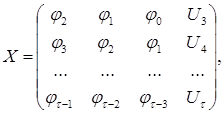
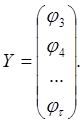
Далее из таблицы 2.1 формируются матрицы X и Y, которые имеют вид:
Конечной расчетной формулой МНК является выражение (2.10):
 (2.10)
(2.10)
где  — вектор-столбец оценочных параметров модели (2.8), X и Y — указанные выше матрицы.
— вектор-столбец оценочных параметров модели (2.8), X и Y — указанные выше матрицы.
Таким образом, в результате вычислений получается вектор-столбец оценочных параметров модели (2.8) имеющий вид:
 (2.11)
(2.11)
Или

Для идентификации модели электромеханической системы использовались данные, экспериментально полученные при проведении исследований динамических характеристик и параметров привода РЛС в ООО НПО «Горизонт» [3]. Значения для каждой фазовой координаты представляют собой векторы, полученные путем измерения данной координаты в конкретные промежутки времени, определяемые временем квантования, которое составило  секунды.
секунды.
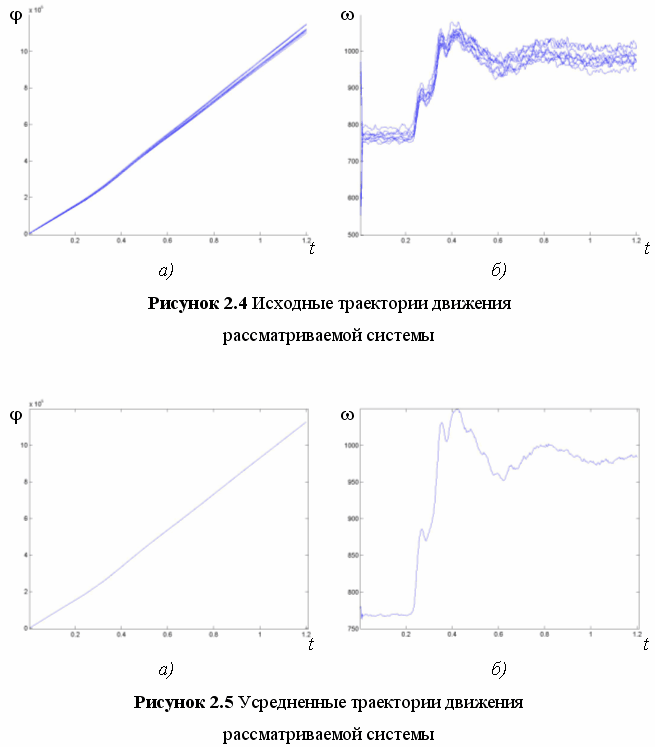
В качестве исходных данных выступают скорость поворота исполняемого органа привода и управляющее воздействие. В процессе проведения эксперимента были получены несколько траекторий движения системы, а именно девять, после чего было проведено усреднение результатов. Так как измерения проводились с малым временем квантования, то для уменьшения громоздкости расчетов была проведена интерполяция исходных данных с временем квантования  секунды. Экспериментальные данные представлены на рисунках 2.4 — 2.7 и представляют собой зависимость значений фазовых координат от времени.
секунды. Экспериментальные данные представлены на рисунках 2.4 — 2.7 и представляют собой зависимость значений фазовых координат от времени.
На рисунке 2.4 представлены множество траекторий, снятых с экспериментальной установки в процессе эксперимента. На рисунке 2.5 представлены усредненные траектории, а на рисунке 2.6. — интерполированные; рисунки а) представляют собой угол поворота, а рисунки б) — скорость. На рисунке 2.7 изображено подаваемое в процессе эксперимента управление.
Используя приведенные исходные данные, была построена таблица, как было показано выше и с помощью нее сформированы матрицы X и Y. Подставив эти матрицы в выражение (2.10), был получен вектор-столбец оценочных параметров авторегрессионно-регрессионной модели объекта. Значения параметров АРРМ имеют вид, приведенный ниже:
 (2.12)
(2.12)
Таким образом был получен общий вид авторегрессионно-регрессионной модели объекта, который приведен ниже:
 (2.13)
(2.13)
Для получения значений wt, необходимо задаться выражением:
Проверим адекватность полученной модели. Для этого сравним исходные данные, полученные экспериментально, и данные полученные с помощью математической модели, вид которой приведен выше.
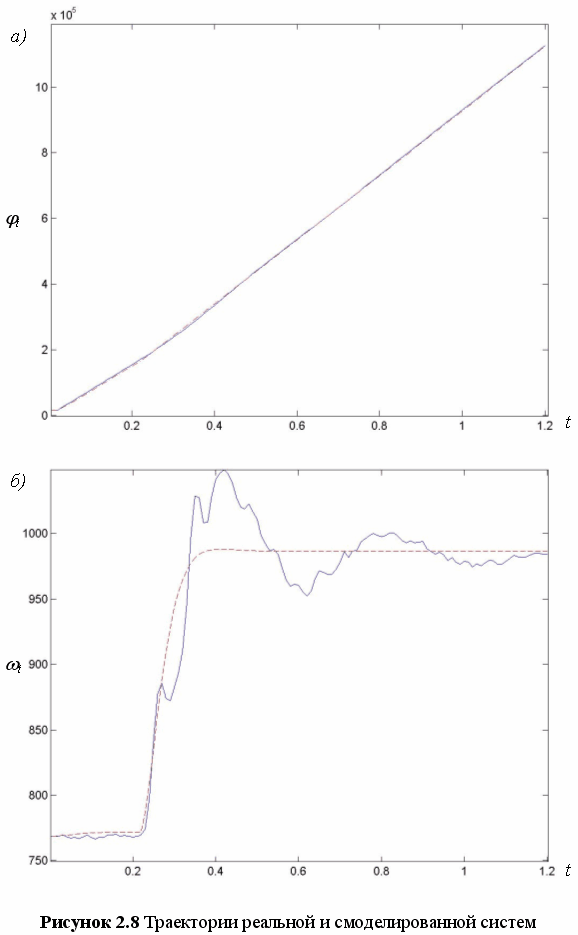
На рисунке 2.8 представлены эталонная и смоделированная траектории движения системы. На рисунке 2.8, а изображены графики изменения угла поворота jt, а на рисунке 2.8, б — графики изменения скорости поворота wt. Из графика видно, что авторегрессионно-регрессионная модель объекта, с данными параметрами адекватно описывает поведение реальной системы.
Таким образом был получен вид авторегрессионно-регрессионной модели, удовлетворяющий требованием точности. Процесс идентификации завершился за шаг.
Следует упомянуть тот факт, что данная модель описывает траектории системы не в принятых единицах измерения углов и скоростей, а в некоторых унифицированных импульсах, которые используются в данной электромеханической системе. Для перехода к градусам необходимо воспользоваться следующим выражением:  где j — искомый угол, n — количество импульсов.
где j — искомый угол, n — количество импульсов.
Формирование ограничений
Любая реальная техническая система имеет ограничения на управление. Это обусловлено конструкцией и техническими характеристиками рассматриваемой системы. Ограничения отражаются в технических условиях на эксплуатацию системы.
Управляющим параметром электропривода является напряжение на якоре, которое обозначается U. В связи с техническими особенностями данного объекта управления, напряжение на якоре не может превышать некоторого предельно допустимого значения. Это обусловлено максимальным током в обмотке якоря  , а также характеристиками источника энергии, используемого в данной системе. Таким образом, необходимо учитывать это ограничение при разработке управляющего устройства.
, а также характеристиками источника энергии, используемого в данной системе. Таким образом, необходимо учитывать это ограничение при разработке управляющего устройства.
Еще одним ограничением на управляющий параметр, является то, что величина не может меняться скачкообразно на сколь угодно большую величину. Это ограничение обусловлено возможностями и конструкцией источника энергии и регулирующего устройства, которое задает характер изменения величины управляющего параметра. Это второе ограничение, накладываемое на управление.
Таким образом в данной работе рассматривается следующий случай: область управления U имеет размерность 2, т.е. эта область представляет собой плоскость в пространстве управлений.
Математически область управления U для данной системы задается следующей системой выражений:
 (2.14)
(2.14)
где первое выражение накладывает ограничение на величину, а второе — на скорость изменения значения управляющего параметра. Выражение (2.14) представляет собой ограничения, написанные для непрерывных систем. Так как в рассматриваемом случае рассматривается дискретное время, то перепишем систему (2.14) в виде, пригодном для дискретных систем:
 (2.15)
(2.15)
где  — представляет собой разность значений управляющего параметра текущего и предыдущего моментов времени, что для дискретных систем является аналогом скорости непрерывных систем.
— представляет собой разность значений управляющего параметра текущего и предыдущего моментов времени, что для дискретных систем является аналогом скорости непрерывных систем.
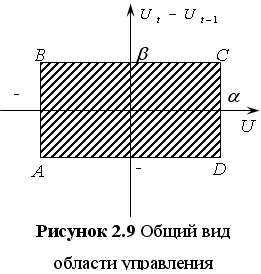
На рисунке 2.9 представлен общий вид области управления для рассматриваемой задачи.
Реальные численные значения данных границ зависят от коэффициентов масштабирования реальной системы, которые определяются входящими в систему усилителями и преобразователями, и выбираются для каждого моделируемого объекта индивидуально, в строгом соответствии с техническими условиями и правилами эксплуатации. Для данной системы ограничения имеют вид:
 (2.16)
(2.16)
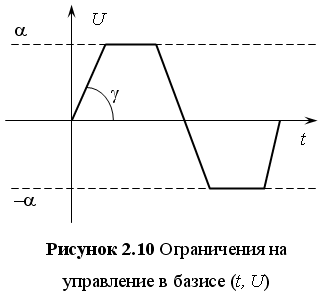
Для того чтобы перейти из пространства управлений в базис времени необходимо воспользоваться теоремой Гамкрелидзе о числе переключений [1]. Движение будет осуществляться по граням области управления, т.е. по сторонам прямоугольника в пространстве управлений. На рисунке 2.10 представлены ограничения в координатах (t, U).
Ограничение на величину параметра представляет собой две горизонтальные линии, обозначенные на рисунке пунктиром, с ординатами a и –a. Ограничение на скорость изменения величины управляющего параметра определяется углом g наклона траектории:
Как видно из рисунка 2.10 управление имеет вид кусочно-гладкой функции с несколькими переключениями.
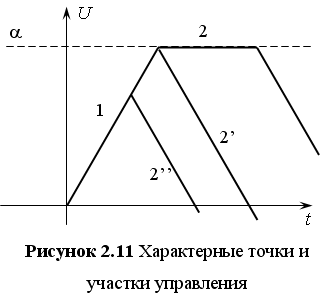
Точки переключений в базисе (t, U), соответствуют вершинам прямоугольника области управления (рисунок 2.9). Участок 1 на рисунке 2.11 соответствует движению по часовой стрелке по отрезку BC. Это движение будет длиться до момента достижения точки C, далее движение будет происходить по отрезку CD, на рисунке 2.11 этому движению соответствует участок 2. Движение по участку CD в пространстве управлений будет длиться до момента достижения точки D и т.д.
Существует один интересный случай, когда скорость управления, скачком меняется на противоположное значение, т.е. в пространстве управлений будет наблюдаться скачок с отрезка BC на отрезок CD. Этому соответствует участок 2’ в базисе (t, U). Участок 2’’ на рисунке 2.11 соответствует скачку с отрезка BC на отрезок CD в пространстве управлений, не достигнув точки переключения.
На самом деле такой характер изменения скорости допустим, так как при задании ограничений говорилось, что скачком не может меняться только величина управляющего параметра, тогда как на скорость изменения этого параметра такого ограничения не накладывалось. Это не противоречит рассуждениям приведенным в разделе 1.1. То есть управляющий параметр является не безынерционным, а скорость изменения этого параметра — безынерционным. Правомерность этого утверждения легко подтверждается физическим смыслом управления, являющегося напряжением на якоре.
Необходимо рассмотреть случай, при котором возникшую ошибку можно ликвидировать за один шаг. Запишем регулятор для АРРМ вида (2.8), обеспечивающий равенство  . Выражение для такого регулятора имеет вид:
. Выражение для такого регулятора имеет вид:

или для ошибки:
 [5]
[5]
Будем называть такое управление одношаговым. Для реализации такого управления необходимо, чтобы выработанное таким образом управление также удовлетворяло условию (2.15), а иначе такое управление является нереализуемым за один шаг.
Дата: 2019-07-24, просмотров: 330.