При переходе от реального объекта к его модели исключительно важную роль играет правильный выбор допущений. Во всяком случае, они обязательно должны быть строго оговорены. Не сделав этого, можно даже не заметить, что модель негодная, и как минимум впустую потратить время.
Допущения
Будем полагать, что гистерезис в магнитной цепи и реакция якоря не проявляются, т.е. ток возбуждения однозначно определяет магнитным поток Ф:Ф =f(iв) ≈ kвiв, что щетки расположены на оси, перпендикулярной оси полюсов, и коммутация идеальна, т. е. ток переходит от одной секции обмотки якоря к другой мгновенно без каких-либо искажений; что к валу со стороны машины приложен электромагнитный момент Мэм = М, а все моменты, обусловленные механическими потерями, входят в момент сопротивления нагрузки Мс.
Будем считать, что все переменные (токи, напряжения, момент, скорость) находятся в допустимых пределах и не опасны для машины.
В качестве модели данного типа двигателей будем использовать систему уравнений (6.1) – (6.5), где U – напряжение сети, В; Iв, Iя – токи возбуждения и якоря А; Фм, Фр.я, Ф — магнитные потоки, соответственно обусловленные обмоткой возбуждения, реакции якоря и результирующий, Вб; 2р – число полюсов; σ – коэффициент рассеяния; с – конструктивный коэффициент двигателя; wв – число витков обмотки возбуждения; Lя – индуктивность, Гн, и сопротивление, Ом, якорной цепи; Jя – момент инерции электродвигателя, кг·м2; М, Мс – электромагнитный момент двигателя и момент сопротивления, Н·м; ω – угловая скорость ротора, рад/с.
При моделировании принимаем, что Lя во время переходных процессов остается постоянной величиной.
Технические данные и параметры исследуемого двигателя 63-111 ф. Feedback:
Рном = 250 Вт; nном = 2500 мин-1; 2р = 4; Iя.ном = 1,0 А; 2а = 2; с = 158; Фном = 80·10-4 Вб; Rя = 12 Ом; Lя = 75·10-3 Гн; Iв.ном = 0,3 А; wв = 860; σ=1,15; wc = 8; Rв = 750 Ом; Lв=39 Гн; Lдоб = 0,7 мГн; Jя = 2,3 кг·м2; Мном = 0,56 Н·м.
Структурные схемы модели в том виде, в котором она представляется в программе MATLAB, изображены на рис. 6.5. Осциллограммы, полученные в результате моделирования, можно просмотреть дважды, щелкнув мышью на соответствующих блоках.
Модель состоит из следующих блоков:
1. блок «Powergui» - предназначен для работы моделируемой системы, состоящей из блоков директории SimPowerSystems;
2. блок «AC Voltage Source» - источник питания переменного тока (на схеме «AC»);
3. блок «Detailed Thyristor» - тиристор (на схеме «VS1» … «VS4»);
4. блок «DC Machine» - двигатель постоянного тока;
5. блок «Current Measurement» - амперметр (на схеме «Aa»);
6. блок «Voltage Measurement» - вольтметр (на схеме «Va»);
7. блок «Series RLC Branch» - последовательное соединение элементов R, L и С (на схеме используется катушка индуктивности «L»);
8. блок «Scope» - осциллограф;
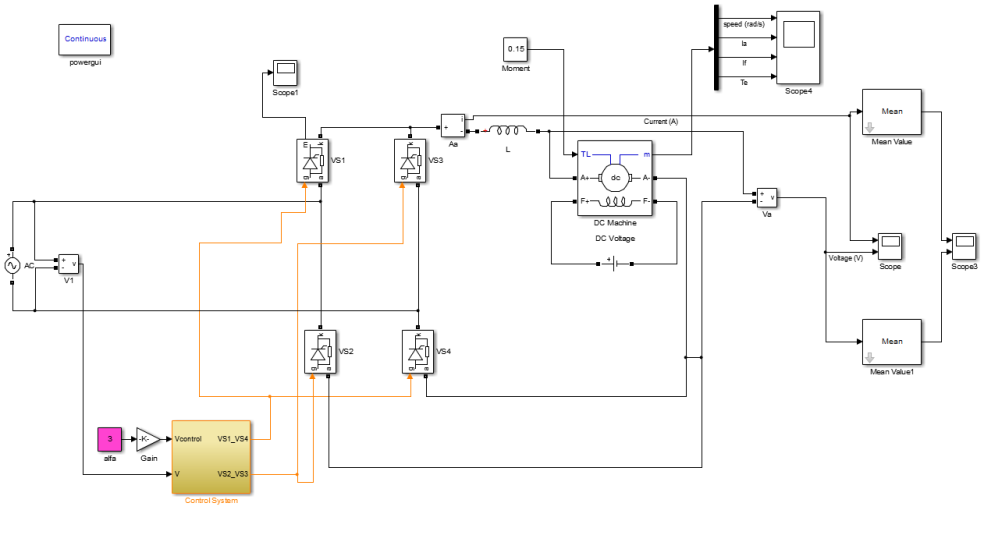
Рис. 6.5. Структурная схема модели двигателя постоянного тока при питании от полностью управляемого преобразователя

Рис. 6.6. Осциллограмма частоты вращения двигателя постоянного тока при питании от полностью управляемого преобразователя

Рис. 6.7. Осциллограмма частоты тока якоря двигателя постоянного тока при питании от полностью управляемого преобразователя

Рис. 6.8. Осциллограмма тока возбуждения двигателя постоянного тока при питании от полностью управляемого преобразователя

Рис. 6.9. Осциллограмма крутящего момента двигателя постоянного тока при питании от полностью управляемого преобразователя
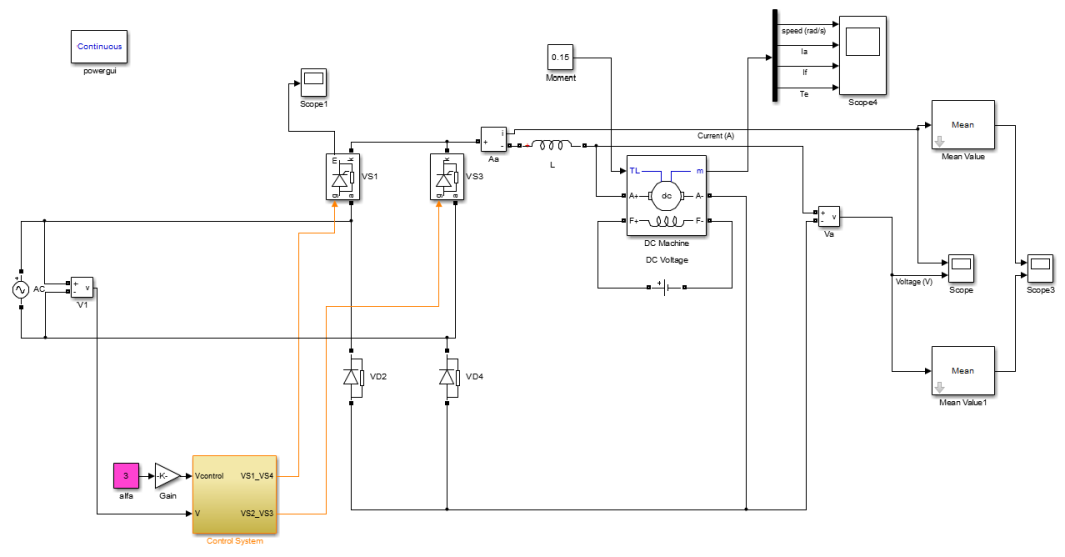
Рис. 6.10. Структурная схема модели двигателя постоянного тока при питании от полууправляемого преобразователя

Рис. 6.11. Осциллограмма частоты вращения двигателя постоянного тока при питании от полууправляемого преобразователя

Рис. 6.12. Осциллограмма частоты тока якоря двигателя постоянного тока при питании от полууправляемого преобразователя

Рис. 6.13. Осциллограмма тока возбуждения двигателя постоянного тока при питании от полууправляемого преобразователя

Рис. 6.14. Осциллограмма крутящего момента двигателя постоянного тока при питании от полууправляемого преобразователя
Дата: 2019-07-24, просмотров: 428.