На рис. 6.1 приведена структурная схема двигателя постоянного тока с независимым возбуждением ДПТ НВ при питании от выпрямителя. Последний может быть полу- или полностью управляемым. Цепь возбуждения двигателя питается от сети переменного тока через диодный мост. Полууправляемый мостовой выпрямитель содержит 2 управляемых и 2 неуправляемых вентиля (2 тиристора и 2 диода), у полностью управляемого выпрямителя все вентили управляемые.
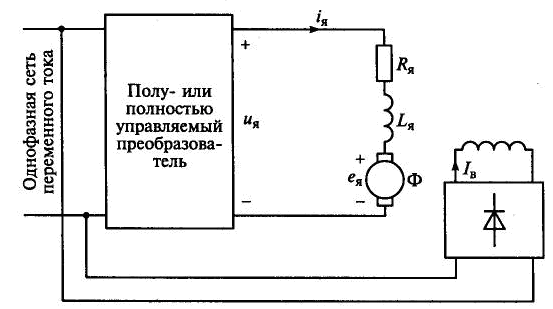
Рис. 6.1. Базовая структурная схема двигателя постоянного тока независимого возбуждения с однофазным силовым преобразователем
Запишем основные уравнения для ДПТ НВ. Ток якоря двигателя постоянного тока определяется его ЭДС ея сопротивлением якоря Rя и индуктивностью Lя.
Электродвижущая сила якоря выражается зависимостью:
e я =сФ ω, (6.1)
где с — коэффициент, определенный конструкцией; Ф — поток двигателя.
Среднее значение ЭДС якоря:
E я = c Ф ωср (6.2)
Электромагнитный момент:
M=сФ Iя (6.3)
Среднее значение момента:
М cp = сФ I я (6.4)
Напряжение якорной цепи двигателя можно представить следующим образом:
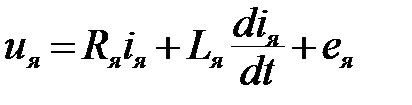 (6.5)
(6.5)
Среднее значение напряжения якорной цепи:
u я = R я I я + E я (6.6)
Заметим, что индуктивность Lя в это выражение не входит. Из (6.2) и (6.6) можно найти выражение для средней угловой скорости двигателя:
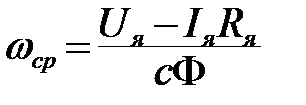 (6.7)
(6.7)
Уравнения (6.2), (6.4), (6.6), (6.7) описывают связь между средними значениями переменных, мгновенные значения которых могут меняться по любому закону.
Согласно (6.7) скорость ДПТ можно регулировать тремя способами: изменением подводимого напряжения; изменением потока (тока возбуждения); изменением сопротивления цепи якоря. Рассмотрим возможности регулирования скорости двигателя изменением подводимого напряжения.
Процесс регулирования скорости для полууправляемого и полностью управляемого преобразователя при допущении непрерывности тока подробно рассмотрен в монографии [1]. Здесь приводится лишь его краткое описание, поэтому временные диаграммы приведены только для iя и uя.
В полууправляемом преобразователе (рис. 6.2) тиристор VS1 переходит в открытое состояние в момент, соответствующий углу (α), a VS2 – углу (α+π) относительно питающего напряжения U. В полностью управляемом преобразователе (рис.6.5), тиристоры VS1 и VS3 переходят в открытое состояние одновременно в момент, соответствующий углу (α), a VS2 и VS4 – углу (α + π).
Рис. 6.2. Регулирование скорости двигателя постоянного тока независимого возбуждения с помощью однофазного полу управляемого преобразователя:
а) схема силовой цепи;
б) диаграммы токов и напряжений для режима непрерывного тока
Двигатель, включенный по схеме рис. 6.2, подключен к сети в течение фазового интервала α < Ωt < π через тиристор VS1 и диод VD2. Напряжение на двигателе Uя равно питающему U. При Ω t > π напряжение U изменяет полярность, а прямое падение напряжения на обратном диоде VD0 переводит его в открытое состояние. Ток якоря, протекающий ранее от сети через VS1, теперь проходит через VD0, (тиристор VS1 закрыт). Цепь якоря двигателя в течение интервала π< Ω t < π + α закорочена на обратный диод, поэтому Uя =0.
В период открытого состояния тиристора (α < Ω t < π) энергия из сети передается в якорную цепь, превращаясь в энергию электромагнитного поля в индуктивностях якоря Lя, кинетическую энергию вращения механических частей электропривода и полезную работу. В период закрытого состояния тиристора между фазами (π) и (π+α) запасенная в индуктивностях энергия поля превращается в механическую, а продолжающий протекать по якорной цепи ток iя создает электромагнитный момент. В этот период энергия в сеть не возвращается.
Рис. 6.3. Регулирование скорости двигателя постоянного тока независимого возбуждения с помощью однофазного полностью управляемого преобразователя:
а) схема силовой цепи;
б) диаграммы токов и напряжений для режима непрерывного тока
В полностью управляемом преобразователе (рис. 6.3) тиристоры VS1 и VS3 находятся в открытом состоянии и соединяют двигатель с сетью в течение периода α < Ω t < π+α. В момент (π+α) тиристоры VS2 и VS4 переходят в открытое состояние, при этом к тиристорам VS1 и VS3 через открытые тиристоры VS2 и VS4 прикладывается напряжение обратной полярности и закрывает их.
Такая коммутация получила название естественной. Ток якоря двигателя Iя, протекавший через тиристоры VS1 и VS3, теперь проходит через тиристоры VS2 и VS4. В течение фазового интервала (α < Ωt <π) энергия из сети передается к двигателю (как u, i, так uя, iя положительны и обусловливают положительное направление потока энергии).
Наоборот, в течение интервала заключенного между π < Ω t < π + α, часть энергии из якорной цепи возвращается в сеть (u и i, а также uя и iя, имеют разные направления, определяющие направление потока энергии от двигателя к сети). На рис. 6.4 представлены диаграммы токов и напряжений для угла управления, превышающего 90º. Среднее значение напряжения якоря Uя при этом отрицательно. Если ЭДС двигателя меняет направление, то он работает как генератор постоянного тока, отдавая энергию в сеть, т.е. работает в режиме рекуперативного торможения.
При синусоидальной форме питающего напряжения, когда  , средние значения напряжений якорной цепи в случаях полу- и полностью управляемых преобразователей можно определить соответственно по следующим формулам:
, средние значения напряжений якорной цепи в случаях полу- и полностью управляемых преобразователей можно определить соответственно по следующим формулам:
 (6.8)
(6.8)
 (6.9)
(6.9)
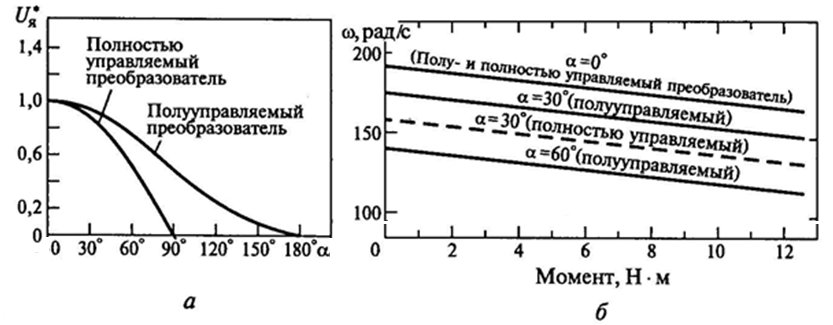
Рис. 6.4. Характеристики преобразователя и двигателя в режиме непрерывного тока: а) зависимость выходного напряжения преобразователя от угла управления; б) механические характеристики при различных углах управления
Зависимость напряжения якоря двигателя от угла управления α для рассмотренных типов преобразователей представлена на рис. 6.4, а.
Решение уравнений (6.4), (6.7). (6.8). (6.9) относительно угловой скорости ω позволяет получить уравнение механических характеристик для полу- и полностью управляемых схем соответственно:
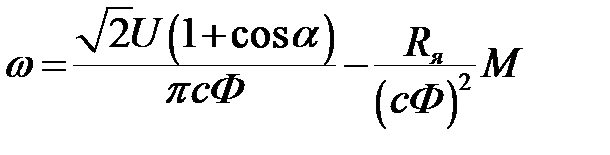 (6.10)
(6.10)
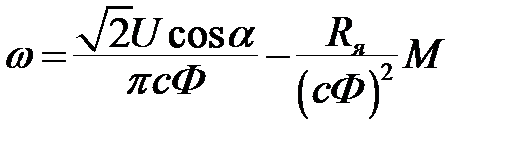 (6.11)
(6.11)
Первый член правых частей уравнений (6.10) и (6.11) представляет собой скорость идеального холостого хода, второй соответствует изменению скорости, происходящему под влиянием протекающего в якоре тока Iя или соответствующего ему электромагнитного момента М, воздействующего на вал. Скорость идеального холостого хода, как это следует из уравнений, зависит от угла управления. Механические характеристики, представленные на рис. 6.4б, свидетельствуют о хороших регулировочных возможностях при работе системы в режиме непрерывного тока.
При больших значениях угла управления тиристоров, высоких скоростях и небольших нагрузках на валу ток якоря, как правило, имеет прерывистый характер, что вызывает увеличение скоростей холостого хода по сравнению с представленными на рис. 6.4б и уменьшение диапазона регулирования.
В зоне прерывистых токов увеличиваются отношения амплитуды и действующего значения тока якоря к его среднему значению, что отрицательно сказывается на тепловом режиме двигателя; ухудшаются его динамические показатели. По этим причинам целесообразно осуществлять регулирование с непрерывным током якоря, для чего в якорную цепь вводятся дополнительные сглаживающие реакторы, увеличивающие ее постоянную времени.
Подчеркнем еще раз, что введение дополнительной индуктивности в якорную цепь сужает зону прерывистых токов и увеличивает жесткость механических характеристик в широкой области изменения момента.
 (6.12)
(6.12)
P вых =2π nM 2 (6.13)
 (6.14)
(6.14)
Дата: 2019-07-24, просмотров: 363.