Основными составляющими автоматизированных систем реального времени (АСУ ВР) являются комплекс технических средств, программное и информационное обеспечение.
Для принятия решения по управлению нужно знать о состоянии объекта управления и возмущениях со стороны внешней среды. Эта информация вводится в систему с помощью измерительных средств, которые являются источниками информации для средств переработки информации. Эти средства реализуют алгоритм принятия решения и формируют управляющие воздействия, которые передаются на исполнительные средства, непосредственно связанные с изменяемыми параметрами объекта управления.
Для того чтобы человек участвовал в процессе принятия решения, ему также нужно дать возможность следить за состоянием объекта и внешней среды. Для этого он снабжается устройствами отображения информации, которые предназначены для преобразования информации в удобную для восприятия форму (чаще всего - в визуальную). Человек может вмешиваться в управление, воздействуя на исполнительные средства и на средства переработки информации с помощью управляющих средств.
Поскольку части системы могут находиться на значительных расстояниях друг от друга, часть связей представляет собой средства передачи данных - специальные технические устройства, предназначенные для этих целей. Еще одна составляющая комплекса технических средств - система энергоснабжения; ее назначение - снабжение всех технических средств электроэнергией заданного напряжения и мощности.
Все эти составляющие комплекса технических средств показаны на рис. 1.2.
Рисунок 1.2 Составляющие комплекса технических средств
В качестве средств переработки информации обычно применяется узел на основе вычислительной машины. Тип и структура этого узла может быть различной - от простейшего контроллера до кластера, однако в любом случае его применение связано со следующими особенностями:
- он должен «следить» за множеством параллельно протекающих процессов;
- он должен обрабатывать запросы, поступающие в произвольные моменты времени;
- допустимое время принятия решения обычно соизмеримо с временем реализации алгоритма выработки такого решения;
- он должен удовлетворять повышенным требованиям по надежности и достоверности информации;
- состав задач, которые решает этот узел, заранее известен и программное обеспечение для их решения отлажено.
Эти особенности учитываются при построении программного обеспечения. Оно включает в себя операционную систему, программы решения функциональных задач и программы контроля и обеспечения устойчивости вычислительного процесса.
Главное назначение операционной системы - обеспечение параллелизма и обработка заявок, поступающих в случайные моменты времени. Программы решения функциональных задач выполняют основное целевое назначение системы - управление объектом. Третья группа программ контролирует работу системы.
Информационное обеспечение содержит данные, необходимые для управления системой.
Контрольные вопросы
1 Сформулируйте две постановки задачи выбора оптимального варианта построения системы.
2 Чем управление отличается от регулирования?
3 Приведите примеры систем «жесткого» и «мягкого» реального времени.
4 Укажите на рис. 1.2 связи, где не могут использоваться средства передачи данных.
Лекция 2 Типовые структуры и средства систем автоматизации и управления (САиУ) техническими объектами и технологическими процессами. Назначение и состав технических средств САиУ, типовое обеспечение САиУ. Классы и типовые структуры систем автоматизации и управления.
Классификация автоматизированных систем управления - АСУ ТП, представляющая человеко-машинную систему, предназначенную для выработки и реализации управления технологическим объектом управления в соответствии с некоторым принятым критерием.
Технологический объект управления (ТОУ) – это совокупность технологического оборудования и реализованного на нем по регламенту процесса производства. В качестве ТОУ могут рассматриваться: отдельные установки и агрегаты; группы станков, выполняющих набор последовательных операций и образующих единую технологическую линию; отдельные производственные структуры (участок, цех), выполняющие самостоятельные технологические процессы и некоторый процесс производства в целом.
В зависимости от решаемых задач АСУ ТП может иметь различную структуру; выделяют 3 класса АСУ ТП: локальные, централизованные и распределенные системы управления.
Локальная система управления используется для управления технологически независимым объектом с компактно расположенным оборудованием, и несложными задачами управления. Примеры локальных систем: системы стабилизации, следящие, программного управления. Основные элементы локальной системы: ТОУ, датчики, исполнительное устройство и локальный регулятор. В системе обычно предусматриваются элементы ручного управления и связи с оператором (рис. 2.1). В зависимости от реализации регулятора локальные системы могут быть как аналоговыми так и цифровыми.
Рисунок 2.1 Типовая структура локальной системы управления
Централизованная система управления используется для управления сосредоточенным объектом со сложными или разнообразными функциями управления или большим количеством сигналов «вход-выход». В системе есть два уровня: на нижнем уровне находятся объекты управления с датчиками и исполнительными устройствами на верхнем управляющая вычислительная машина (УВМ) и устройство сопряжения с объектом (УСО). УСО преобразует различные по виду сигналы от датчиков (входные сигналы), в цифровой код в формате, определяемом конкретной УВМ. Сформированные УВМ в виде цифрового кода сигналы управляющих воздействий для исполнительных устройств (выходные сигналы) УСО преобразует к одному из стандартных видов. Для контроля над процессом предусмотрен пульт связи с оператором (ПСО). Все процессы обработки сигналов датчиков и формирование управляющих сигналов для всех контуров управления последовательно исполняет одна и та же УВМ. Она также обеспечивает интерфейс с оператором.
Централизованная система имеет два основных недостатка: малая надежность и низкое быстродействие. Система становиться неработоспособной при отказе УВМ или УСО. При большом количестве датчиков и контуров управления существенно увеличивается время основного цикла управляющей программы УВМ. Для устранения этих недостатков применяют следующие решения.
1. Для повышения надежности осуществляется: а) Дублирование основных элементов системы управления: УВМ и УСО; б) Применение супервизорной структуры.
2. Для повышения быстродействия передают часть функций управления на более низкий уровень: а) Применение супервизорной структуры. б) Переход к распределенной многоуровневой системе управления (рис. 2.2).
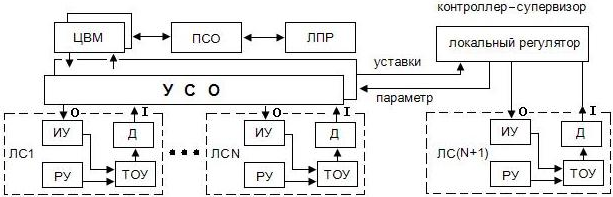
Рисунок 2.2 Типовая структура централизованной системы управления
В супервизорной структуре с верхнего уровня на нижний передаются в цифровом виде значения уставок для регулятора и команды для локального контроллера, а с нижнего уровня на верхний параметры объекта, также в цифровом виде. Непосредственное управление в контуре выполняет локальный контроллер.
Современная модель автоматизации промышленного предприятия.
Распределенная система управления (РСУ) содержит несколько уровней. Модель АСУП предполагает, что САУ различного уровня интегрированы в единую систему, охватывающую весь процесс жизнедеятельности предприятия. Модель имеет форму пирамиды. Опишем ее, начиная с основания. Иерархическая структура и типовая схема многоуровневой РСУ приведена ниже на рис 2.3 и 2.4.
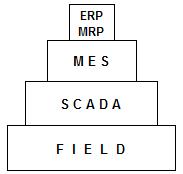
Рисунок 2.3. Иерархическая структура распределенной системы управления
a) Самый нижний уровень (Field, полевой) включает ТОУ, управляемый узлом на базе PLC или Prom PC и непосредственно связанные с ним элементы: датчики и исполнительные устройства. На этом уровне обмен информацией производится по AS – интерфейсу. Название AS происходит от слов датчик (Sensor) и исполнительное устройство (Activator).
b) Следующий уровень (PLC, ПЛК) объединяет устройства локального управления и интерфейсы между ними. Этими устройствами являются локальные регуляторы и программируемые логические контроллеры (ПЛК).
c) На следующем уровне (участка (cell)) расположена (SCADA) – система диспетчерского управления и сбора данных.
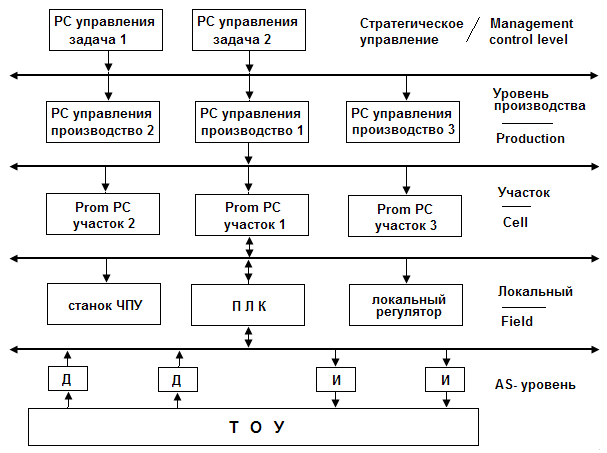
Рисунок 2.4 Типовая структура распределенной системы управления
SCADA системы могут быть 3 видов.
1) DCS – распределенная система управления, обеспечивающая управление в масштабе установки или небольшого цеха. (Siemens, ABB).
Основной элемент такой системы – это функциональный узел на основе PLC или Prom PC.Узлы объединены в разнородную сеть по различным интерфейсам (основной протокол - каждый с каждым) (рис. 2.5).
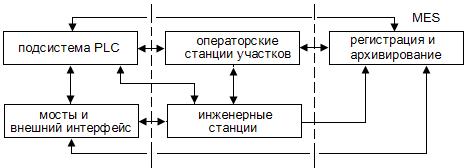
Рисунок 2.5 Структура SCADA системы типа DCS
Каждый узел выполняет некоторый набор задач из следующего списка:
а) сбор и первичная обработка данных участка;
б) управление частью ИУ участка;
в) связь с другими узлами/системами
г) пользовательский интерфейс и отображение данных участка;
2. Классическая SCADA: ее особенности:
а) однородная промышленная сеть;
б) клиент-серверная архитектура;
в) более четкая специализация узлов;
г) более развитой человеко-машинный интерфейс (HMI);
д) фильтрация и архивация текущих данных.
Дополнительно SCADA при соответствующем установленном программном обеспечении (ПО) может решать задачи прогноза и/или оптимизации.
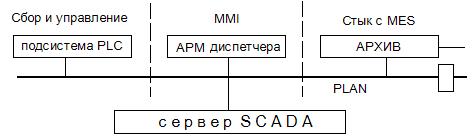
Рисунок 2.6 Структура SCADA системы с выделенным сервером
3. Batch Control. Распределенная система управления, выполненная в соответствии с требованиями стандарта 968.01 ISA. Ее особенность - это использование последовательного пакетного управления, ориентированного на регулирование системы, состоящей из ряда последовательных связанных участков с обеспечением качества и оптимизацией выхода конечного продукта.
Предполагается особая модель объекта управления, используемая в таких областях, как: нефтехимия, фармация, пищевая, строительная промышленность.
d) Уровень организации производства, цеха (production management). На этом уровне функционирует исполнительная система производства MES. Это промежуточный слой, который служит для организации технологической подготовки производства. На этом и последующих уровнях расположены, объединенные в сеть промышленные РС и АРМы специалистов. На этом уровне решаются задачи:
1) планирование и контроль последовательных операций любых ТП.
2) управление производственными (станки) и людскими (персонал) ресурсами в рамках нескольких ТП;
3) распределение работ по заказам;
4) техническое обслуживание оборудования;
5) управление качеством.
e) АСУ Предприятием –это уровень стратегического планирования.
На этом уровне решаются различные классы задач для этого существуют отдельные подсистемы. Вот основные типы подсистем и задач на этом уровне:
1. MRP – планирование ресурсов на уровне цеха. В основе MRP лежит BOM (Bill of Material). В MRP II добавляется управление складскими запасами и производственными мощностями, в EAM добавляется управление основными фондами.
2. ERP I – планирование ресурсов предприятия в целом на основе бизнес-планов. Задачи:
а) управление снабжением и сбытом;
б) выпуск всех видов продукции и распределение заказов;
в) контроль за материальным и финансовым потоками.
3. ERP II добавляются взаимоотношения с поставщиками, дилерами, реклама и PR.
4. IRP – интеллектуальное планирование ресурсов на основе создания динамической модели предприятия.
Стандарты ISO-9000.
Одно из основных условий выхода продукции предприятия на международный рынок – его сертификация по стандартам ISO-9000. Во всемирной торговой организации (ВТО) обязательным требованием является, что или поставщик имеет сертификат ISO-9000, или продажа идет через посредника с ISO-9000. Важнейшие требования, входящие в ISO-9000: идентифицируемость продукта, наблюдаемость и управляемость ТП и материальных потоков. Сертифицированные интегрированные системы АСУ ТП, объединяющие MRP+MES+SCADA эти требования обеспечивают.
Кроме этих уровней АСУ ТП, и программно-аппаратных комплексов, их обеспечивающих, интегрированная система должна сопрягаться еще и с системами САПР: (CAD/CAM/CAE/PDM), системами описания бизнес-процессов, системами программирования PLC и многими другими.
В наше время даже крупнейшие интегрированные системы R3, BAAN Oracle Application не решают всего комплекса задач.
Функции и компоненты типового обеспечения АСУТП
Функции типового обеспечения АСУТП делятся на управляющие, информационные и вспомогательные.
Информационные функции (мониторинг) включают в себя сбор значений переменных процесса, их хранение, отображение в подходящей для человека форме и передача на следующие уровни системы.
Управляющие функции – это выработка и реализация прямых или опосредованных воздействий на параметры объекта управления: регулирование, логическое управление, оптимальное управление режимами или стадиями процесса, адаптивное управление объектом в целом.
Вспомогательные функции сводятся главным образом к диагностике функционирования технических и программных средств АСУТП и поддержанию их в рабочем состоянии. Информационной основой для каждого процесса реального времени (RT) поддерживающего АСУТП, служит база данных процесса, имеющая специфическую структуру
В целом АСУТП включает в себя техническое, программное, информационное обеспечение как основу системы и организационное обеспечение, регламентирующее участие персонала в работе АСУТП.
Техническое обеспечение АСУТП осуществляется комплексом технических средств (КТС), содержащем устройства получения информации о параметрах технологического процесса и состоянии технологического оборудования; формирования и передачи управляющей информации; представления информации персоналу и на другие уровни АСУТП.
Программное обеспечение включает в себя общее программное обеспечение (ПО) в комплекте со средствами вычислительной техники (ВТ) и специальную совокупность программ, реализующих функционирование системы данного типа и конкретный набор функций.
Информационное обеспечение – это единая система кодирования информации и стандартные интерфейсы между элементами системы.
Типовым техническим решением для построения АСУТП является программно-технический комплекс (ПТК), предназначенный для автоматизации технологических процессов определенного профиля. На основе ПТК разрабатываются типовые готовые решения, которые требуют привязки к объекту автоматизации, реконфигурации и настройки оборудования комплекса под конкретный объект. Основные требования, предъявляемые к ПТК и решениям на их основе: стандартизация, типизация, открытость и масштабируемость.
Контрольные вопросы
1 Основные различия в типовых структурах локальной и централизованной системы управления
2 Охарактеризуйте уровни распределенной системы управления
3 Охарактеризуйте виды SCADA систем.
4 Стандарты ISO-9000
5 Опишите функции типового обеспечения АСУТП
6 Опишите компоненты типового обеспечения АСУТП
Тема 2 Технические средства и системы получения информации о состоянии объекта управления
Лекция 3 Структура измерительного канала. Классификация преобразователей. Метрологические характеристики датчиков. Градуировка датчиков. Погрешности измерений. Первичные измерительные преобразователи (чувствительные элементы)
Дата: 2019-04-23, просмотров: 407.