Большинство неэлектрических величин, которые измеряются и регулируются в системах автоматики, удобно преобразовать в механическое перемещение, а затем механическое перемещение преобразовать в электрический сигнал.
Давление определяется по упругой деформации сильфона, мембраны или трубчатой пружины, соответственно для малого, среднего и большого давления.
Сильфон представляет собой тонкостенную металлическую оболочку с поперечной гофрированной боковой поверхностью. Сильфон расширяется или сжимается подобно пружине вдоль оси под действием разности давления внутри и снаружи.
Мембрана - это закрепленная по контуру обычно круглая пластина, которая изгибается под действием давления газа или жидкости.
Трубчатая пружина изготавливается из металла (латунь, сталь и др.), обычно в поперечном сечении имеет овальную форму. Под действием избыточного давления трубчатая пружина стремится разогнуться.
Температура определяется по изгибу биметаллической пружины, давлению жидкости или газа, заполняющего баллон термометра. Биметаллическая пружина представляет собой двухслойную пластину, изготовленную из металлов с разными коэффициентами линейного расширения. При нагревании пластина изгибается в сторону того слоя, материал которого имеет меньший коэффициент.
Уровень и расход жидкости определяются по перемещению поплавка. Так, при движении жидкости снизу вверх в трубке переменного сечения поплавок поднимается, чтобы обеспечить большее поперечное сечение для прохода жидкости. Чем больше расход, тем выше должен подняться поплавок. Плотность жидкости определяется по глубине погружения поплавка.
Усилие определяется по величине упругой деформации пластины или витой пружины.
Контрольные вопросы
1 Опишите типовую структуру измерительного канала
2 Назначение унифицирующего (нормирующего) измерительного преобразователя
3 Перечислите элементы, входящие в состав измерительного тракта
4 Классификация измерительных преобразователей
5 Основные метрологические характеристиками датчиков
6 Охарактеризуйте виды градуировок датчиков
7 Погрешности измерений
Лекция 4 Операционные усилители. Инвертирующий усилитель. Неинвертирующий усилитель. Дифференциальный усилитель. Инструментальные усилители. Повторитель напряжения. Компаратор
Аналоговые схемы предварительной обработки сигналов
Перед вводом различных сигналов от датчиков в ЭВМ часто требуется их предварительная обработка, которая упрощает и облегчает дальнейшие операции над этими сигналами. Характер предварительной обработки зависит от вида датчика и от параметров его выходного сигнала. В состав схем предварительной обработки сигналов могут входить следующие функциональные устройства:
1) усилители, предназначенные для усиления маломощных сигналов датчиков;
2) преобразователи сопротивления, преобразующие высокое выходное сопротивление датчика в низкое;
3) преобразователи тока в напряжение;
4) преобразователи действующих значений - для преобразования выходного сигнала датчика в виде переменного тока в сигнал постоянного тока с тем же действующим значением;
5) схемы логарифмического сжатия, назначение которых - сжатие динамического диапазона выходных сигналов датчика с помощью логарифмического усилителя;
6) фильтры, функция которых - исключение эффекта наложения спектров и подавление шумовых составляющих выходного сигнала датчика;
7) схемы линеаризации, предназначенные для коррекции выходного сигнала датчика, имеющего нелинейную характеристику;
8) регуляторы усиления, выполняющие функцию переключения коэффициента усиления для обеспечения максимальной чувствительности измерительного тракта.
Рассмотрим основные принципы некоторых схемотехнических решений.
Операционные усилители
Операционный усилитель (ОУ) - это дифференциальный усилитель постоянного тока с очень большим коэффициентом усиления (обычно 105...106). На рис. 4.1 показана упрощенная эквивалентная схема ОУ. В представленной модели ОУ имеет входное сопротивление Rвх, включенное между двумя его входами. Выходная цепь состоит из управляемого источника (генератора) напряжения и включенного последовательно с ним выходного сопротивления Rвых. Из-за разности напряжений между входами возникает ток через сопротивление Rвх. Дифференциальное входное напряжение и2 - и1 умножается на коэффициент усиления K; в результате получается величина выходного напряжения.
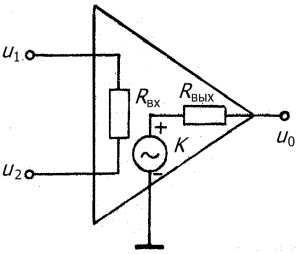
Рисунок 4.1 Упрощенная эквивалентная схема ОУ
Поскольку ОУ обладает чрезвычайно большим коэффициентом усиления по напряжению, даже малое изменение дифференциального напряжения (порядка долей милливольта) вызывает изменение выходного напряжения в пределах его полного диапазона. Очевидно, что и2 - и1 = u0/K. Если и0 имеет конечное значение, а коэффициент усиления K велик, то и2 - и1 ≈ 0 и u1 ≈ и2. Входное сопротивление Rвх очень велико, поэтому током через Rвх можно пренебречь. Отсюда следуют две особенности процесса функционирования ОУ:
1) при работе ОУ в линейной области на двух его входах действуют одинаковые напряжения;
2) входные токи для обоих входов ОУ равны нулю.
Кроме того, для упрощения расчетов и анализа схем предполагается, что идеальный ОУ имеет следующие характеристики:
- коэффициент усиления, при разомкнутой обратной связи равный бесконечности;
- входное сопротивление, равное бесконечности;
- выходное сопротивление, равное нулю;
- ширину полосы пропускания, равную бесконечности.
Рассмотрим, в чем отличие характеристик реальных ОУ от идеальных.
Входной ток. Небольшой ток, называемый входным током смещения, протекает через входные цепи ОУ и равен половине суммы входных токов, измеренных при соединении входов между собой (это базовые токи входных транзисторов). Роль входного тока смещения состоит в том, что он создает падение напряжения на резисторах цепей обратной связи и смещения, а также на сопротивлении источника сигнала. От величины этих сопротивлений зависит влияние тока смещения на параметры схемы по постоянному току и отклонения выходного напряжения.
Промышленность выпускает ОУ с входными токами смещения порядка наноампер и ниже для схем с входами на биполярных транзисторах и порядка нескольких пикоампер для схем со входами на полевых транзисторах.
Разность двух входных токов называют входным током сдвига. В отличие от входного тока смещения ток сдвига обусловлен отклонениями в технологическом процессе изготовления ОУ. Обычно ток сдвига составляет примерно одну десятую часть тока смещения.
Входной импеданс. Эта величина определяется входным сопротивлением для дифференциального сигнала (импеданс со стороны одного из входов при заземлении другого) и составляет примерно 1012 Ом для ОУ со входом на полевом транзисторе и 2 МОм - со входом на биполярном транзисторе.
Входной диапазон сигнала. Для того чтобы ОУ работал правильно, синфазное напряжение на его входах должно находиться в пределах определенного диапазона значений, который обычно не превышает полного диапазона напряжения питания. Это же относится к дифференциальным входным сигналам, однако для некоторых ОУ допустимое напряжение между входами ограничено диапазоном 0,5 В.
Выходное сопротивление - это собственное выходное сопротивление ОУ без обратной связи. Оно лежит в пределах от нескольких десятков до нескольких тысяч ом. Обратная связь делает выходное сопротивление пренебрежимо малым, поэтому большое значение имеет максимально допустимый выходной ток, равный, как правило, примерно 20 мА.
Входное напряжение сдвига. Технологические погрешности приводят к тому, что входные каскады ОУ имеют разбалансировку. Разность входных напряжений, необходимая для того, чтобы выходное напряжение стало равно нулю, называют входным напряжением сдвига. Обычно в ОУ предусматривается возможность уменьшения входного напряжения сдвига до нуля (установка нуля).
Для точных систем большое значение имеет дрейф входного напряжения сдвига под влиянием температуры и времени. Типичные значения: для напряжения сдвига - 1 мВ, для температурного дрейфа - 5 мкВ/°С.
Скорость нарастания выходного напряжения. Наличие емкостей и небольшие внутренние токи ограничивают скорость изменения выходного напряжения даже при условии большого разбаланса входов. Предельную скорость изменения выходного напряжения называют скоростью нарастания. У маломощных ОУ она не превышает 1 В/мкс, быстродействующие ОУ имеют скорость нарастания порядка 100 В/мкс, а сверхбыстродействующие - до 6000 В/мкс. Для синусоидального сигнала, частота которого равна ω (Гц), а амплитуда - А (В), минимальная скорость нарастания должна составлять Aω (В/с).
Шумы усилителя. Для построения прецизионной аппаратуры большое значение имеет уровень собственных шумов усилителя. Источники шумов - это тепловой шум резисторов; шумовое напряжение, которое возникает из-за флуктуации сопротивления при протекании через него «внешнего» тока; дробовой шум, возникающий как следствие квантованности зарядов.
В большинстве схем ОУ применяется в конфигурации с замкнутой обратной связью. Она снижает его коэффициент усиления, но обеспечивает реализацию ряда полезных свойств и характеристик, которые используются в устройствах предварительной обработки сигналов.
4.2 Инвертирующий усилитель. На рис. 4.2 представлена схема такого усилителя. Проведем ее анализ. Потенциал точки В равен потенциалу земли, следовательно, потенциал точки А также равен потенциалу земли. Это означает, что: а) падение напряжения на резисторе R2 равно uвых; б) падение напряжения на резисторе R1 равно uвх.
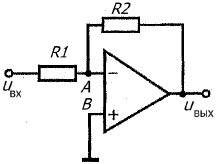
Рисунок 4.2 Схема инвертирующего усилителя
Поскольку входной ток ОУ равен нулю (см. выше), справедливо равенство: uвых / R2= uвх / R1 откуда следует, что коэффициент усиления по напряжению: K = uвых / uвх = -( R2 / R1 )
Обычно коэффициент усиления по напряжению для постоянного тока лежит в пределах от 10000 до 100000.
Поскольку инвертирующий вход ОУ практически заземлен, входным сопротивлением является R1. При его увеличении уменьшается коэффициент усиления, который можно повысить, увеличивая R2, однако, поскольку возможности увеличения сопротивлений ограничены, входное сопротивление инвертирующего усилителя обычно невелико.
Неинвертирующий усилитель. Рассмотрим схему на рис. 4.3.
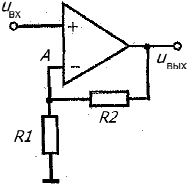
Рисунок 4.3 Схема неинвертирующего усилителя
Напряжение иА снимается с делителя напряжения: иА = uвых R1 / ( R1 + R2 )
Поскольку иА = uвх, то: K = uвых / uвх = 1 + R2 / R1
Входной импеданс этого усилителя превышает 108 Ом, выходной равен долям ома.
Дифференциальный усилитель. На рис. 4.4 показана принципиальная схема простого дифференциального усилителя на одном ОУ.
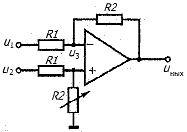
Рисунок 4.4 принципиальная схема простого дифференциального усилителя на одном ОУ
Проведем ее анализ. Поскольку входные токи для обоих входов ОУ равны нулю, ток, определяемый напряжением u2, протекает через резисторы R1 и R2 на землю. Делитель напряжения на этих резисторах определяет величину напряжения на неинвертирующем входе ОУ: u3 = u2R2/(R1+ R2)
Напряжение на инвертирующем входе ОУ должно быть равно напряжению на его неинвертирующем входе. Следовательно, верхняя половина схемы действует как инвертирующий усилитель. Рассчитывая ток в ней так, как это было сделано для инвертирующего усилителя, получаем: i=(u1–u3)/R1 = (u3–uвых)/R2
Подставляя соотношение для u3, получаем окончательно: uвых = (u2- u1)R2/R1
Полученное соотношение определяет коэффициент усиления дифференциального усилителя. Если на обоих входах такого усилителя действует одинаковое напряжение, то теоретически его выходное напряжение равно нулю; если напряжения различны, то коэффициент усиления дифференциального (разностного) напряжения равен R2/R1.
Реальный дифференциальный усилитель не обеспечивает полного подавления синфазного напряжения. Количественной мерой способности дифференциального усилителя подавлять синфазное напряжение служит коэффициент ослабления синфазного сигнала (КОСС), определяемый как отношение коэффициента усиления дифференциального напряжения к коэффициенту усиления синфазного напряжения. Величина КОСС может находиться в пределах от 100 до 10000 и обычно измеряется в децибелах.
Дифференциальный усилитель на одном ОУ имеет низкое входное сопротивление; его основное назначение - подавление помех, общих для обоих его входов.
В особую группу выделяют инструментальные усилители, представляющие собой структуру из трех операционных усилителей. Характерным примером такого усилителя может служить схема INA118 фирмы BURR-BROWN. В основе этой схемы - дифференциальный усилитель, выполненный на одном ОУ, но для увеличения входного сопротивления на двух его входах включены ОУ с защитой от перегрузки при помощи полевых транзисторов. Они обеспечивают малое последовательное сопротивление при нормальных рабочих условиях, а в случае приложения избыточного входного напряжения (более +4 В) ограничивают входной ток на уровне 1,5...5 мА. Коэффициент усиления такого усилителя регулируется внешним сопротивлением в диапазоне от 1 до 10000.
Если усилитель используется для усиления сигнала с большим динамическим диапазоном или для усиления нескольких сигналов, поступающих от разных датчиков и имеющих существенно разные амплитуды, то целесообразно использовать инструментальные усилители с программируемым коэффициентом усиления. Он устанавливается путем изменения параметров обратной связи входных ОУ по сигналам процессора. Например, в инструментальных усилителях AD620 и AD625 фирмы Analog Device программируемый коэффициент усиления лежит в диапазоне 1...10000.
Повторитель напряжения. Если в инвертирующем усилителе (см. рис. 4.2) положить R1 = ∞ и R2 = 0, то входное напряжение будет непосредственно передаваться на выход схемы, т.е. такой усилитель будет повторять входное напряжение. Повторитель напряжения иногда называют буферным усилителем или преобразователем сопротивления, так как он имеет большой входной и малый выходной импеданс и, следовательно, обладает изолирующими свойствами.
Компаратор. Это специализированный ОУ с дифференциальным входом и парафазным цифровым выходом. Входной каскад компаратора построен аналогично схемам ОУ и работает в линейном режиме. На выходе компаратора формируются сигналы высокого логического уровня, если разность входных сигналов меньше напряжения срабатывания компаратора, или низкого логического уровня, если разность входных сигналов превышает напряжение срабатывания компаратора (рис. 4.5).
Основные параметры компаратора: чувствительность (точность, с которой компаратор может различать два входных сигнала), быстродействие (скорость отклика, определяемая задержкой срабатывания и временем нарастания сигнала), нагрузочная способность (способность компаратора управлять определенным числом входов цифровых микросхем).
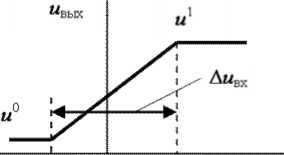
Рисунок 4.5 Напряжение срабатывания компаратора
Чувствительность компаратора измеряется единицами милливольт; быстродействие в зависимости от типа схемы лежит в диапазоне от единиц наносекунд до единиц микросекунд; нагрузочная способность зависит от выходного каскада схемы компаратора: для ее повышения включается эмиттерный повторитель.
Контрольные вопросы
1 Опишите упрощенную эквивалентную схему операционного усилителя
2 Проведите анализ схемы инвертирующего усилителя
3 Проведите анализ схемы неинвертирующего усилителя
4 Опишите принципиальную схему простого дифференциального усилителя на одном ОУ
5 Что из себя представляют инструментальные усилители
6 Назначение и свойства повторителя напряжения
7 Основные параметры компаратора
Лекция 5 Унифицирующие измерительные преобразователи. Фильтры. Пассивные фильтры. Активные фильтры
5.1 Унифицирующие измерительные преобразователи
Естественные сигналы, поступающие от датчиков, различаются по динамическим диапазонам и по мощности, могут быть сигналами напряжения и сигналами тока. В соответствии с ГОСТ 26.011 80 сигналы напряжения - это сигналы, поступающие от источника с выходным сопротивлением, значение которого много меньше входного сопротивления приемника сигнала; сигнал тока - это сигнал, поступающий от источника с выходным сопротивлением, значение которого много больше входного сопротивления приемника сигнала.
Наиболее существенное соображение, которое нужно принимать во внимание, - сигнал должен быть малочувствительным к электрическим возмущениям. При передаче сигнала напряжением нужно учитывать, что входной импеданс подключенного устройства - не бесконечность, и поэтому по линии связи будет протекать ток. Следовательно, возникнет падение напряжения. Если амплитуда сигнала будет изменяться, то потечет ток перезарядки распределенных емкостей и возникнут помехи. Один из способов передачи сигналов напряжением является организация трехпроводной системы.
Главная причина популярности напряжения как носителя сигнала - простота и доступность устройств для обработки сигнала. Однако напряжение не слишком пригодно для передачи данных на большие расстояния.
Для передачи сигналов на значительные расстояния лучше воспользоваться током, так как он постоянен по всей длине кабеля. На конце линии токовый сигнал преобразуется в напряжение с помощью высокоточного шунтирующего резистора. На передающем конце выходное напряжение датчика преобразуется операционным усилителем в ток. Токовые сигналы, как правило, используются на низких частотах до 10 Гц. При переменном токе становится заметным влияние емкостного эффекта: часть тока уходит либо в обратный провод, либо в заземленный экран.
Измерительная система, использующая для передачи сигнала ток и датчик, гальванически изолированный от выходного сигнала, имеет следующие преимущества:
- достаточно хорошо работает на длинных линиях;
- допускает простую процедуру проверки, если допустимый ток ограничен по минимуму, например, 4 мА; если ток меньше, это значит, что линия отключена или разомкнута;
- обеспечивает хорошую защиту от помех;
- обеспечивает передачу сигнала по двум проводам.
Для согласования источников информации с другими устройствами измерительно-вычислительного комплекса их сигналы должны быть унифицированы, т.е. должны быть преобразованы так, чтобы соответствовать определенным требованиям.
Эти требования установлены ГОСТ 26.011-80 и ГОСТ 26.013- 81. В качестве носителя информации в них приняты электрические сигналы постоянного и переменного тока и напряжения, причем оговорены следующие диапазоны их изменения:
- для сигналов тока -5...+5 мА (на сопротивлении нагрузки Rнагр = 2,5 кОм); 0...+20 мА (Rнагр = 1,0 кОм); +4.20 мА (Rнагр = 1,0 кОм); -20...+20 мА (Rнагр = 1,0 кОм); -100 +100 мА (Rнагр = 250 Ом);
- для сигналов напряжения: 0...1 В; —1...+1 В; 0…5 В (Rнагр = 1,0 кОм); 1…5 В (Rнагр = 1,0 кОм); 0...10 В (Rнагр = 2,0 кОм) и т.д.
Для преобразования естественных выходных сигналов датчиков в унифицированные применяются унифицирующие измерительные преобразователи (УИП). Различают индивидуальные, групповые и многоканальные УИП. Индивидуальные следует использовать для унификации сигналов при сравнительно небольшом числе измеряемых параметров и при ограниченном времени измерения. Они позволяют преобразовывать один унифицированный сигнал в другой, обеспечивать гальваническую развязку входных цепей, размножать входной сигнал по нескольким выходам.
Групповые УИП обслуживают группу датчиков, выходные сигналы которых однородны. Групповой УИП должен применяться вместе с коммутатором и его параметры должны настраиваться в соответствии с параметрами выходного сигнала подключенного датчика.
Многоканальные УИП представляют собой конструктивно объединенные индивидуальные УИП.
Унифицирующие измерительные преобразователи могут выполнять как линейные, так и нелинейные преобразования сигналов. К линейным относятся операции масштабирования и установки нуля, к нелинейным - линеаризация.
Масштабирование и установка нуля. Если выходной сигнал датчика возрастает от у1 до y2, а унифицированный сигнал на выходе УИП должен лежать в пределах от нуля до z (z > y2 — y1), то для совмещения начала динамических диапазонов УИП и датчика к сигналу датчика должен быть добавлен сигнал —y1, а затем суммарный сигнал должен быть усилен в К = z/(y2 — y1) раз. Величина у1 может изменяться, например, при изменении температуры. В этом случае ее снимают с первичного преобразователя.
Линеаризация. Характеристическая кривая датчика y = F(x), как правило, нелинейна. Для упрощения алгоритмов обработки можно использовать схемные методы линеаризации, реализовав с помощью УИП операцию x = F-1(y). Пусть, например, датчик реализует функцию y = ax2. Если УИП выполняет операцию z = ky, то для определения искомой величины x следует вычислить  . Если же коэффициент преобразования УИП выбран так, что
. Если же коэффициент преобразования УИП выбран так, что  , то никаких вычислений делать не нужно.
, то никаких вычислений делать не нужно.
Линеаризация чаще всего обеспечивается кусочно-линейной аппроксимацией функции преобразования и построением ОУ с управляемой обратной связью.
5.2 Фильтры
Важным элементом измерительного тракта является схема фильтрации. Ее назначение - изменение частотных характеристик входного сигнала, что необходимо для уменьшения влияния шумовой составляющей на результат его обработки и для исключения эффекта наложения спектров при его дискретизации.
Если сигнал и помеха имеют разный частотный состав, то для уменьшения влияния помехи достаточно пропустить смесь сигнала и помехи через фильтр, который «вырежет» из нее информативную полосу частот.
Эффект наложения спектров заключается в следующем. Как известно, спектр ST(ω) дискретизованного сигнала представляет собой последовательность спектров S(ω) исходного сигнала s(t), сдвинутых относительно друг друга на ω0 = 2π/Т и убывающих по закону
где Т - шаг дискретизации, τ0 - длительность импульсов синхронизации. Если шаг дискретизации выбран так, что ωm < π/T, т.е. Т < π/ωm <fm/2, то отдельные спектры не перекрываются (рис. 5.1, а, б).
При пропускании такого спектра через четырехполюсник с П-образной амплитудно-частотной характеристикой (идеальный фильтр нижних частот) с полосой пропускания (-π/T, + π/Т) (рис. 5.1, в) из спектра дискретизованного сигнала будет выделяться средняя часть, которая с точностью до постоянного множителя совпадает со спектром исходного непрерывного сигнала (рис. 5.1, г).
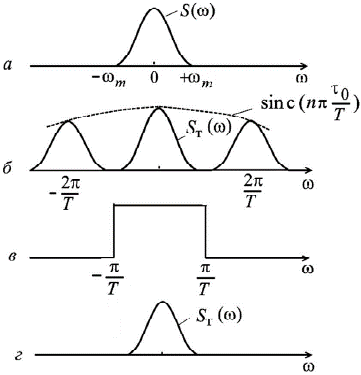
Pисунок 5.1
Однако если исходное непрерывное колебание таково, что его спектр с ростом частоты не обращается строго в нуль, то при любом выборе интервала дискретизации соседние составляющие спектра дискретизованного колебания будут частично перекрываться (рис. 5.2, а).
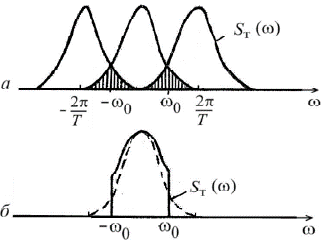
Pисунок 5.2
Для предотвращения этого явления можно предварительно пропустить непрерывный сигнал через низкочастотный фильтр с полосой пропускания (-π/T, +π/Т). При этом будут потеряны частоты, лежащие вне этого диапазона, но эффект наложения частот будет исключен.
Фильтры нижних частот могут быть построены как на пассивных, так и на активных элементах.
Пассивные фильтры. Рассмотрим схему, изображенную на рис. 5.3, а. При подаче на вход напряжения u = u0 exp j(ωt + φ) мгновенное значение комплексного тока в цепи i = C(du/dt) = jωCu0 exp j(ωt + φ) = -u0 /jXc, где Xc = 1/ωС - емкостное сопротивление.
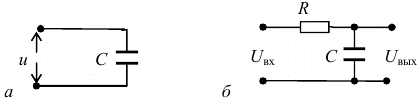
Рисунок 5.3
Используем этот результат при анализе схемы на рис. 5.3,б. В ней реактивное сопротивление Z = R -j/ωС, поэтому комплексный ток можно представить в виде:
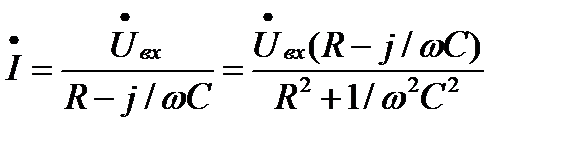
Тогда комплексное выходное напряжение

Модуль выходного напряжения

Зависимость модуля коэффициента передачи этой цепи от частоты показана на рис. 5.4. Ее вид свидетельствует о том, что такая цепь пропускает низкие частоты и подавляет высокие, поэтому она является фильтром низких частот.
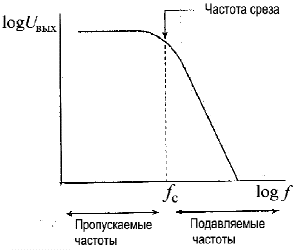
Рисунок 5.4
Если поменять местами конденсатор и резистор в схеме фильтра низких частот, то получится простейший пассивный фильтр высоких частот.
Анализ его характеристик можно выполнить аналогичным образом.
Активные фильтры. Часто возникает необходимость в фильтрах с более плоским участком характеристики в полосе пропускания и с более крутыми склонами. Простое каскадное соединение не даст нужного результата, так как входное сопротивление каждого звена будет служить нагрузкой для предыдущего звена. Применение преобразователей сопротивления увеличивает наклон, но «излом» амплитудно-частотной характеристики остается плавным. Требуемые характеристики можно получить, используя активные фильтры - ОУ с частотно-зависимой обратной связью.
Рассмотрим несколько измененную схему инвертирующего усилителя с реактивным сопротивлением Z во входной цепи и импедансом Z0 в цепи обратной связи (рис. 5.5).
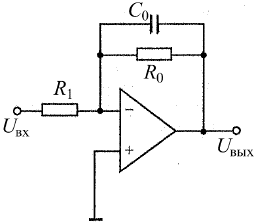
Рисунок 5.5
Комплексный коэффициент усиления такой схемы K = Uвых/Uвх =-Z0/Z. Когда импеданс обратной связи образован параллельно включенными резистором R0 и конденсатором С0, величина Z0 = R0/(1 + jω R0 C0).
Заменяя R0C0 = 1/ω0 = 1/2πf0 и полагая, что импеданс Z = R, получаем, что комплексный коэффициент усиления
 (5.1)
(5.1)
где
 (5.2)
(5.2)

В логарифмическом масштабе нормированное соотношение (5.2) запишется в виде

Эта зависимость - логарифмическая амплитудно-частотная характеристика - изображена на рис. 5.6 линией 1:
 ,
,

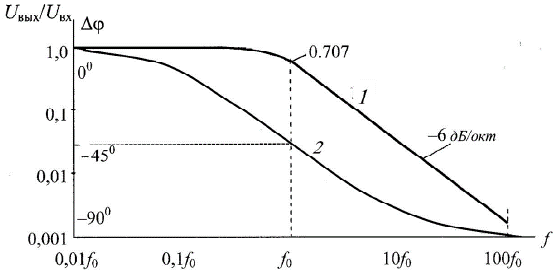
Рисунок 5.6
Излом этой характеристики соответствует f = f0 , а наклон крутой части составляет 20 lg 2 = 6 дБ/окт, или 20 lg 10 = 20 дБ/дек. Заметим, что точное значение нормированной характеристики в точке f=f0 равно 1/√2 (т.е. -3 дБ).
Кривая 2 на рис. 5.6 представляет частотную зависимость фазового сдвига: ∆φ = 0 при f ≤ 0,1/f0; ∆φ = -450[1+lg(f/f0)] при 0.1f0 ≤ f ≤ 10f0; ∆φ = -900 при f ≥ 10f0. В точке излома f = f0 отклонение ∆φ = -450, абсолютная величина наклона составляет 45°lg2 = 13,55 град/окт или 45°lg10 = 45 град/дек.
[При построении частотных характеристик значение числа N в децибелах (дБ) равно 20lg10N, октава и декада соответствуют двукратному и десятикратному изменению частоты.]
Соотношение (5.2) определяет амплитудно-частотную характеристику фильтра нижних частот, а именно - фильтра Баттерворта. Этот тип фильтра имеет максимально плоскую характеристику в полосе пропускания. Другие распространенные типы активных фильтров нижних частот - фильтры Чебышева и Бесселя.
Заметим, что при замене –(R0/R) = a0, 1 = b0, 1/R0C0 = b1, p = jω комплексный коэффициент усиления (5.1) записывается в виде: K = a0/(b0+ pb1),
что представляет собой частный случай более общего соотношения:
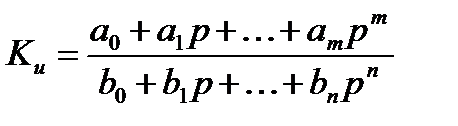 ,
,
описывающего характеристику рекурсивного фильтра.
Основное преимущество активных фильтров - очень низкий выходной импеданс, что позволяет каскадировать подобные схемы и добиваться требуемых частотных характеристик.
Контрольные вопросы
1 Преимущества измерительной системы, использующей для передачи сигнала ток и датчик, гальванически изолированный от выходного сигнала
2 Назначение схемы фильтрации измерительного тракта
3 Смысл эффекта наложения спектров
4 Опишите схему, реализующую пассивный фильтр
5 Опишите схему, реализующую активный фильтр
6 В чем заключается различие между пассивным и активным фильтром
Лекция 6 Мультиплексоры аналоговых сигналов. Схемы выборки и хранения
Дата: 2019-04-23, просмотров: 428.