Модуль 1 Специализированные технические средства и системы автоматизации
Тема 1 Основные понятия и классификация систем управления
Основные понятия
Под системой принято понимать совокупность связанных между собой элементов. Система характеризуется структурой S = <E, C, λ>, где Е - множество элементов, С - множество связей между элементами, λ - соответствие между элементами.
При этом элементом называется часть системы, не подлежащая дальнейшему делению на части при данном уровне рассмотрения. Элементы могут представлять собой понятия, и тогда мы будем иметь дело с понятийной системой; если элементами системы являются физические объекты, то налицо техническая система. Заметим, что в определении отмечается некоторая совокупность, т.е. некоторая целостность. Нас интересуют не отдельные элементы, а все вместе, взятые в некотором единстве. Принципиальным является необходимость учета взаимодействия элементов, так как именно оно придает совокупности элементов новое качество.
Часть элементов системы, выделенная на основе какой-либо общности элементов, называется подсистемой.
Системы, создаваемые человеком, обладают целью функционирования. Именно наличие цели служит тем объединяющим фактором, на основе которого объединяются элементы. Такие системы называют организованными системами.
Лекция 1 Управление как процесс принятия и реализации решения. Классификация систем управления. Структура систем реального времени
1.1 Управление как процесс принятия и реализации решения
В повседневной деятельности мы часто сталкиваемся с терминами «управлять», «регулировать» и понимаем под этими терминами задачу воздействия на параметры объекта для достижения определенных целей. Естественно называть управлением целенаправленное изменение параметров объекта управления.
Совокупность наиболее важных параметров, от которых зависит функционирование объекта управления, описывает его состояние. Знание состояния объекта управления - важнейший фактор, определяющий принятие решения по управлению. Другой важный фактор - возмущения, которым подвергается объект управления со стороны других объектов, состоянием которых мы не можем управлять. Множество таких объектов объединяется понятием «внешняя среда». На основе оценок состояния объекта управления и внешней среды принимается решение по управлению. Конечно, при этом учитывается цель функционирования и ресурсы, которыми мы располагаем. После того, как решение приято, оно реализуется с потреблением ресурсов. Так мы приходим к структурной схеме процесса управления, показанной на рис. 1.1.
Рисунок 1.1 Структурная схема процесса управления
Управление осуществляется путем выдачи на объект управляющих воздействий: Х(t) = (x1, x2, ..., xn; t).
Кроме них, объект управления подвергается воздействию возмущений со стороны внешней среды; часть из них: Z(t) = (z1, z2, ..., zm; t) измеряется,
другая часть: F(t) = (f1, f2, ..., fs; t) неизвестна (часто неизвестно также значение s).
Контролируемые параметры, по которым ведется управление, Y(t) = (y1, y2, ..., yr; t), называются управляемыми. Управляемые параметры дают обобщенную информацию о состоянии объекта управления
S(t) = (s1, s2, ..., sk; t).
Смена состояний объекта управления определяет процесс его функционирования:
S(t) = φ[X(t), Z(t), F(t), Y(t), S(t-1)].
Задача управления состоит в том, чтобы найти такую функцию X(t), которая обеспечила бы перевод объекта в заданное конечное состояние S*, соответствующее цели его функционирования. Этот перевод должен закончиться за конечное число шагов и требовать минимальных затрат ресурсов R.
Операционные усилители
Операционный усилитель (ОУ) - это дифференциальный усилитель постоянного тока с очень большим коэффициентом усиления (обычно 105...106). На рис. 4.1 показана упрощенная эквивалентная схема ОУ. В представленной модели ОУ имеет входное сопротивление Rвх, включенное между двумя его входами. Выходная цепь состоит из управляемого источника (генератора) напряжения и включенного последовательно с ним выходного сопротивления Rвых. Из-за разности напряжений между входами возникает ток через сопротивление Rвх. Дифференциальное входное напряжение и2 - и1 умножается на коэффициент усиления K; в результате получается величина выходного напряжения.
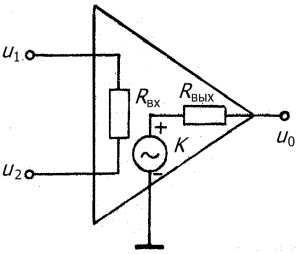
Рисунок 4.1 Упрощенная эквивалентная схема ОУ
Поскольку ОУ обладает чрезвычайно большим коэффициентом усиления по напряжению, даже малое изменение дифференциального напряжения (порядка долей милливольта) вызывает изменение выходного напряжения в пределах его полного диапазона. Очевидно, что и2 - и1 = u0/K. Если и0 имеет конечное значение, а коэффициент усиления K велик, то и2 - и1 ≈ 0 и u1 ≈ и2. Входное сопротивление Rвх очень велико, поэтому током через Rвх можно пренебречь. Отсюда следуют две особенности процесса функционирования ОУ:
1) при работе ОУ в линейной области на двух его входах действуют одинаковые напряжения;
2) входные токи для обоих входов ОУ равны нулю.
Кроме того, для упрощения расчетов и анализа схем предполагается, что идеальный ОУ имеет следующие характеристики:
- коэффициент усиления, при разомкнутой обратной связи равный бесконечности;
- входное сопротивление, равное бесконечности;
- выходное сопротивление, равное нулю;
- ширину полосы пропускания, равную бесконечности.
Рассмотрим, в чем отличие характеристик реальных ОУ от идеальных.
Входной ток. Небольшой ток, называемый входным током смещения, протекает через входные цепи ОУ и равен половине суммы входных токов, измеренных при соединении входов между собой (это базовые токи входных транзисторов). Роль входного тока смещения состоит в том, что он создает падение напряжения на резисторах цепей обратной связи и смещения, а также на сопротивлении источника сигнала. От величины этих сопротивлений зависит влияние тока смещения на параметры схемы по постоянному току и отклонения выходного напряжения.
Промышленность выпускает ОУ с входными токами смещения порядка наноампер и ниже для схем с входами на биполярных транзисторах и порядка нескольких пикоампер для схем со входами на полевых транзисторах.
Разность двух входных токов называют входным током сдвига. В отличие от входного тока смещения ток сдвига обусловлен отклонениями в технологическом процессе изготовления ОУ. Обычно ток сдвига составляет примерно одну десятую часть тока смещения.
Входной импеданс. Эта величина определяется входным сопротивлением для дифференциального сигнала (импеданс со стороны одного из входов при заземлении другого) и составляет примерно 1012 Ом для ОУ со входом на полевом транзисторе и 2 МОм - со входом на биполярном транзисторе.
Входной диапазон сигнала. Для того чтобы ОУ работал правильно, синфазное напряжение на его входах должно находиться в пределах определенного диапазона значений, который обычно не превышает полного диапазона напряжения питания. Это же относится к дифференциальным входным сигналам, однако для некоторых ОУ допустимое напряжение между входами ограничено диапазоном 0,5 В.
Выходное сопротивление - это собственное выходное сопротивление ОУ без обратной связи. Оно лежит в пределах от нескольких десятков до нескольких тысяч ом. Обратная связь делает выходное сопротивление пренебрежимо малым, поэтому большое значение имеет максимально допустимый выходной ток, равный, как правило, примерно 20 мА.
Входное напряжение сдвига. Технологические погрешности приводят к тому, что входные каскады ОУ имеют разбалансировку. Разность входных напряжений, необходимая для того, чтобы выходное напряжение стало равно нулю, называют входным напряжением сдвига. Обычно в ОУ предусматривается возможность уменьшения входного напряжения сдвига до нуля (установка нуля).
Для точных систем большое значение имеет дрейф входного напряжения сдвига под влиянием температуры и времени. Типичные значения: для напряжения сдвига - 1 мВ, для температурного дрейфа - 5 мкВ/°С.
Скорость нарастания выходного напряжения. Наличие емкостей и небольшие внутренние токи ограничивают скорость изменения выходного напряжения даже при условии большого разбаланса входов. Предельную скорость изменения выходного напряжения называют скоростью нарастания. У маломощных ОУ она не превышает 1 В/мкс, быстродействующие ОУ имеют скорость нарастания порядка 100 В/мкс, а сверхбыстродействующие - до 6000 В/мкс. Для синусоидального сигнала, частота которого равна ω (Гц), а амплитуда - А (В), минимальная скорость нарастания должна составлять Aω (В/с).
Шумы усилителя. Для построения прецизионной аппаратуры большое значение имеет уровень собственных шумов усилителя. Источники шумов - это тепловой шум резисторов; шумовое напряжение, которое возникает из-за флуктуации сопротивления при протекании через него «внешнего» тока; дробовой шум, возникающий как следствие квантованности зарядов.
В большинстве схем ОУ применяется в конфигурации с замкнутой обратной связью. Она снижает его коэффициент усиления, но обеспечивает реализацию ряда полезных свойств и характеристик, которые используются в устройствах предварительной обработки сигналов.
4.2 Инвертирующий усилитель. На рис. 4.2 представлена схема такого усилителя. Проведем ее анализ. Потенциал точки В равен потенциалу земли, следовательно, потенциал точки А также равен потенциалу земли. Это означает, что: а) падение напряжения на резисторе R2 равно uвых; б) падение напряжения на резисторе R1 равно uвх.
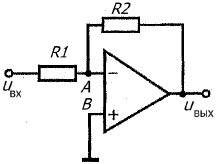
Рисунок 4.2 Схема инвертирующего усилителя
Поскольку входной ток ОУ равен нулю (см. выше), справедливо равенство: uвых / R2= uвх / R1 откуда следует, что коэффициент усиления по напряжению: K = uвых / uвх = -( R2 / R1 )
Обычно коэффициент усиления по напряжению для постоянного тока лежит в пределах от 10000 до 100000.
Поскольку инвертирующий вход ОУ практически заземлен, входным сопротивлением является R1. При его увеличении уменьшается коэффициент усиления, который можно повысить, увеличивая R2, однако, поскольку возможности увеличения сопротивлений ограничены, входное сопротивление инвертирующего усилителя обычно невелико.
Неинвертирующий усилитель. Рассмотрим схему на рис. 4.3.
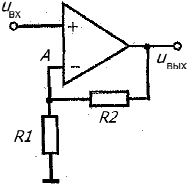
Рисунок 4.3 Схема неинвертирующего усилителя
Напряжение иА снимается с делителя напряжения: иА = uвых R1 / ( R1 + R2 )
Поскольку иА = uвх, то: K = uвых / uвх = 1 + R2 / R1
Входной импеданс этого усилителя превышает 108 Ом, выходной равен долям ома.
Дифференциальный усилитель. На рис. 4.4 показана принципиальная схема простого дифференциального усилителя на одном ОУ.
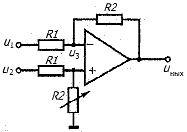
Рисунок 4.4 принципиальная схема простого дифференциального усилителя на одном ОУ
Проведем ее анализ. Поскольку входные токи для обоих входов ОУ равны нулю, ток, определяемый напряжением u2, протекает через резисторы R1 и R2 на землю. Делитель напряжения на этих резисторах определяет величину напряжения на неинвертирующем входе ОУ: u3 = u2R2/(R1+ R2)
Напряжение на инвертирующем входе ОУ должно быть равно напряжению на его неинвертирующем входе. Следовательно, верхняя половина схемы действует как инвертирующий усилитель. Рассчитывая ток в ней так, как это было сделано для инвертирующего усилителя, получаем: i=(u1–u3)/R1 = (u3–uвых)/R2
Подставляя соотношение для u3, получаем окончательно: uвых = (u2- u1)R2/R1
Полученное соотношение определяет коэффициент усиления дифференциального усилителя. Если на обоих входах такого усилителя действует одинаковое напряжение, то теоретически его выходное напряжение равно нулю; если напряжения различны, то коэффициент усиления дифференциального (разностного) напряжения равен R2/R1.
Реальный дифференциальный усилитель не обеспечивает полного подавления синфазного напряжения. Количественной мерой способности дифференциального усилителя подавлять синфазное напряжение служит коэффициент ослабления синфазного сигнала (КОСС), определяемый как отношение коэффициента усиления дифференциального напряжения к коэффициенту усиления синфазного напряжения. Величина КОСС может находиться в пределах от 100 до 10000 и обычно измеряется в децибелах.
Дифференциальный усилитель на одном ОУ имеет низкое входное сопротивление; его основное назначение - подавление помех, общих для обоих его входов.
В особую группу выделяют инструментальные усилители, представляющие собой структуру из трех операционных усилителей. Характерным примером такого усилителя может служить схема INA118 фирмы BURR-BROWN. В основе этой схемы - дифференциальный усилитель, выполненный на одном ОУ, но для увеличения входного сопротивления на двух его входах включены ОУ с защитой от перегрузки при помощи полевых транзисторов. Они обеспечивают малое последовательное сопротивление при нормальных рабочих условиях, а в случае приложения избыточного входного напряжения (более +4 В) ограничивают входной ток на уровне 1,5...5 мА. Коэффициент усиления такого усилителя регулируется внешним сопротивлением в диапазоне от 1 до 10000.
Если усилитель используется для усиления сигнала с большим динамическим диапазоном или для усиления нескольких сигналов, поступающих от разных датчиков и имеющих существенно разные амплитуды, то целесообразно использовать инструментальные усилители с программируемым коэффициентом усиления. Он устанавливается путем изменения параметров обратной связи входных ОУ по сигналам процессора. Например, в инструментальных усилителях AD620 и AD625 фирмы Analog Device программируемый коэффициент усиления лежит в диапазоне 1...10000.
Повторитель напряжения. Если в инвертирующем усилителе (см. рис. 4.2) положить R1 = ∞ и R2 = 0, то входное напряжение будет непосредственно передаваться на выход схемы, т.е. такой усилитель будет повторять входное напряжение. Повторитель напряжения иногда называют буферным усилителем или преобразователем сопротивления, так как он имеет большой входной и малый выходной импеданс и, следовательно, обладает изолирующими свойствами.
Компаратор. Это специализированный ОУ с дифференциальным входом и парафазным цифровым выходом. Входной каскад компаратора построен аналогично схемам ОУ и работает в линейном режиме. На выходе компаратора формируются сигналы высокого логического уровня, если разность входных сигналов меньше напряжения срабатывания компаратора, или низкого логического уровня, если разность входных сигналов превышает напряжение срабатывания компаратора (рис. 4.5).
Основные параметры компаратора: чувствительность (точность, с которой компаратор может различать два входных сигнала), быстродействие (скорость отклика, определяемая задержкой срабатывания и временем нарастания сигнала), нагрузочная способность (способность компаратора управлять определенным числом входов цифровых микросхем).
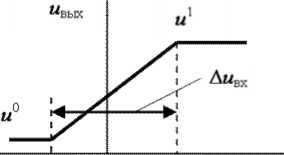
Рисунок 4.5 Напряжение срабатывания компаратора
Чувствительность компаратора измеряется единицами милливольт; быстродействие в зависимости от типа схемы лежит в диапазоне от единиц наносекунд до единиц микросекунд; нагрузочная способность зависит от выходного каскада схемы компаратора: для ее повышения включается эмиттерный повторитель.
Контрольные вопросы
1 Опишите упрощенную эквивалентную схему операционного усилителя
2 Проведите анализ схемы инвертирующего усилителя
3 Проведите анализ схемы неинвертирующего усилителя
4 Опишите принципиальную схему простого дифференциального усилителя на одном ОУ
5 Что из себя представляют инструментальные усилители
6 Назначение и свойства повторителя напряжения
7 Основные параметры компаратора
Лекция 5 Унифицирующие измерительные преобразователи. Фильтры. Пассивные фильтры. Активные фильтры
5.1 Унифицирующие измерительные преобразователи
Естественные сигналы, поступающие от датчиков, различаются по динамическим диапазонам и по мощности, могут быть сигналами напряжения и сигналами тока. В соответствии с ГОСТ 26.011 80 сигналы напряжения - это сигналы, поступающие от источника с выходным сопротивлением, значение которого много меньше входного сопротивления приемника сигнала; сигнал тока - это сигнал, поступающий от источника с выходным сопротивлением, значение которого много больше входного сопротивления приемника сигнала.
Наиболее существенное соображение, которое нужно принимать во внимание, - сигнал должен быть малочувствительным к электрическим возмущениям. При передаче сигнала напряжением нужно учитывать, что входной импеданс подключенного устройства - не бесконечность, и поэтому по линии связи будет протекать ток. Следовательно, возникнет падение напряжения. Если амплитуда сигнала будет изменяться, то потечет ток перезарядки распределенных емкостей и возникнут помехи. Один из способов передачи сигналов напряжением является организация трехпроводной системы.
Главная причина популярности напряжения как носителя сигнала - простота и доступность устройств для обработки сигнала. Однако напряжение не слишком пригодно для передачи данных на большие расстояния.
Для передачи сигналов на значительные расстояния лучше воспользоваться током, так как он постоянен по всей длине кабеля. На конце линии токовый сигнал преобразуется в напряжение с помощью высокоточного шунтирующего резистора. На передающем конце выходное напряжение датчика преобразуется операционным усилителем в ток. Токовые сигналы, как правило, используются на низких частотах до 10 Гц. При переменном токе становится заметным влияние емкостного эффекта: часть тока уходит либо в обратный провод, либо в заземленный экран.
Измерительная система, использующая для передачи сигнала ток и датчик, гальванически изолированный от выходного сигнала, имеет следующие преимущества:
- достаточно хорошо работает на длинных линиях;
- допускает простую процедуру проверки, если допустимый ток ограничен по минимуму, например, 4 мА; если ток меньше, это значит, что линия отключена или разомкнута;
- обеспечивает хорошую защиту от помех;
- обеспечивает передачу сигнала по двум проводам.
Для согласования источников информации с другими устройствами измерительно-вычислительного комплекса их сигналы должны быть унифицированы, т.е. должны быть преобразованы так, чтобы соответствовать определенным требованиям.
Эти требования установлены ГОСТ 26.011-80 и ГОСТ 26.013- 81. В качестве носителя информации в них приняты электрические сигналы постоянного и переменного тока и напряжения, причем оговорены следующие диапазоны их изменения:
- для сигналов тока -5...+5 мА (на сопротивлении нагрузки Rнагр = 2,5 кОм); 0...+20 мА (Rнагр = 1,0 кОм); +4.20 мА (Rнагр = 1,0 кОм); -20...+20 мА (Rнагр = 1,0 кОм); -100 +100 мА (Rнагр = 250 Ом);
- для сигналов напряжения: 0...1 В; —1...+1 В; 0…5 В (Rнагр = 1,0 кОм); 1…5 В (Rнагр = 1,0 кОм); 0...10 В (Rнагр = 2,0 кОм) и т.д.
Для преобразования естественных выходных сигналов датчиков в унифицированные применяются унифицирующие измерительные преобразователи (УИП). Различают индивидуальные, групповые и многоканальные УИП. Индивидуальные следует использовать для унификации сигналов при сравнительно небольшом числе измеряемых параметров и при ограниченном времени измерения. Они позволяют преобразовывать один унифицированный сигнал в другой, обеспечивать гальваническую развязку входных цепей, размножать входной сигнал по нескольким выходам.
Групповые УИП обслуживают группу датчиков, выходные сигналы которых однородны. Групповой УИП должен применяться вместе с коммутатором и его параметры должны настраиваться в соответствии с параметрами выходного сигнала подключенного датчика.
Многоканальные УИП представляют собой конструктивно объединенные индивидуальные УИП.
Унифицирующие измерительные преобразователи могут выполнять как линейные, так и нелинейные преобразования сигналов. К линейным относятся операции масштабирования и установки нуля, к нелинейным - линеаризация.
Масштабирование и установка нуля. Если выходной сигнал датчика возрастает от у1 до y2, а унифицированный сигнал на выходе УИП должен лежать в пределах от нуля до z (z > y2 — y1), то для совмещения начала динамических диапазонов УИП и датчика к сигналу датчика должен быть добавлен сигнал —y1, а затем суммарный сигнал должен быть усилен в К = z/(y2 — y1) раз. Величина у1 может изменяться, например, при изменении температуры. В этом случае ее снимают с первичного преобразователя.
Линеаризация. Характеристическая кривая датчика y = F(x), как правило, нелинейна. Для упрощения алгоритмов обработки можно использовать схемные методы линеаризации, реализовав с помощью УИП операцию x = F-1(y). Пусть, например, датчик реализует функцию y = ax2. Если УИП выполняет операцию z = ky, то для определения искомой величины x следует вычислить  . Если же коэффициент преобразования УИП выбран так, что
. Если же коэффициент преобразования УИП выбран так, что  , то никаких вычислений делать не нужно.
, то никаких вычислений делать не нужно.
Линеаризация чаще всего обеспечивается кусочно-линейной аппроксимацией функции преобразования и построением ОУ с управляемой обратной связью.
5.2 Фильтры
Важным элементом измерительного тракта является схема фильтрации. Ее назначение - изменение частотных характеристик входного сигнала, что необходимо для уменьшения влияния шумовой составляющей на результат его обработки и для исключения эффекта наложения спектров при его дискретизации.
Если сигнал и помеха имеют разный частотный состав, то для уменьшения влияния помехи достаточно пропустить смесь сигнала и помехи через фильтр, который «вырежет» из нее информативную полосу частот.
Эффект наложения спектров заключается в следующем. Как известно, спектр ST(ω) дискретизованного сигнала представляет собой последовательность спектров S(ω) исходного сигнала s(t), сдвинутых относительно друг друга на ω0 = 2π/Т и убывающих по закону
где Т - шаг дискретизации, τ0 - длительность импульсов синхронизации. Если шаг дискретизации выбран так, что ωm < π/T, т.е. Т < π/ωm <fm/2, то отдельные спектры не перекрываются (рис. 5.1, а, б).
При пропускании такого спектра через четырехполюсник с П-образной амплитудно-частотной характеристикой (идеальный фильтр нижних частот) с полосой пропускания (-π/T, + π/Т) (рис. 5.1, в) из спектра дискретизованного сигнала будет выделяться средняя часть, которая с точностью до постоянного множителя совпадает со спектром исходного непрерывного сигнала (рис. 5.1, г).
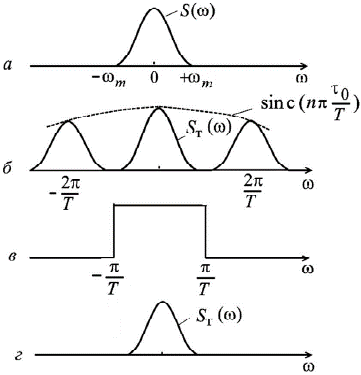
Pисунок 5.1
Однако если исходное непрерывное колебание таково, что его спектр с ростом частоты не обращается строго в нуль, то при любом выборе интервала дискретизации соседние составляющие спектра дискретизованного колебания будут частично перекрываться (рис. 5.2, а).
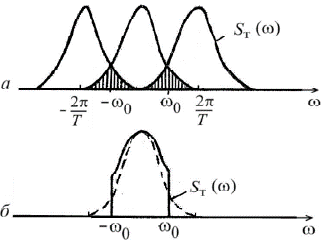
Pисунок 5.2
Для предотвращения этого явления можно предварительно пропустить непрерывный сигнал через низкочастотный фильтр с полосой пропускания (-π/T, +π/Т). При этом будут потеряны частоты, лежащие вне этого диапазона, но эффект наложения частот будет исключен.
Фильтры нижних частот могут быть построены как на пассивных, так и на активных элементах.
Пассивные фильтры. Рассмотрим схему, изображенную на рис. 5.3, а. При подаче на вход напряжения u = u0 exp j(ωt + φ) мгновенное значение комплексного тока в цепи i = C(du/dt) = jωCu0 exp j(ωt + φ) = -u0 /jXc, где Xc = 1/ωС - емкостное сопротивление.
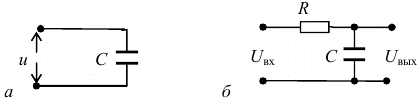
Рисунок 5.3
Используем этот результат при анализе схемы на рис. 5.3,б. В ней реактивное сопротивление Z = R -j/ωС, поэтому комплексный ток можно представить в виде:
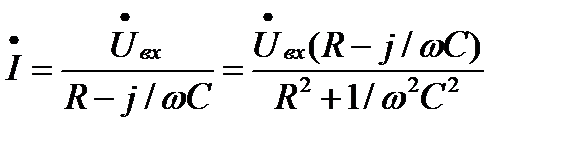
Тогда комплексное выходное напряжение

Модуль выходного напряжения

Зависимость модуля коэффициента передачи этой цепи от частоты показана на рис. 5.4. Ее вид свидетельствует о том, что такая цепь пропускает низкие частоты и подавляет высокие, поэтому она является фильтром низких частот.
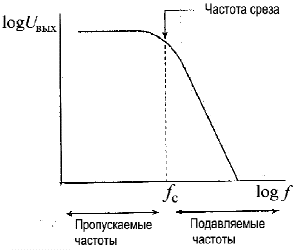
Рисунок 5.4
Если поменять местами конденсатор и резистор в схеме фильтра низких частот, то получится простейший пассивный фильтр высоких частот.
Анализ его характеристик можно выполнить аналогичным образом.
Активные фильтры. Часто возникает необходимость в фильтрах с более плоским участком характеристики в полосе пропускания и с более крутыми склонами. Простое каскадное соединение не даст нужного результата, так как входное сопротивление каждого звена будет служить нагрузкой для предыдущего звена. Применение преобразователей сопротивления увеличивает наклон, но «излом» амплитудно-частотной характеристики остается плавным. Требуемые характеристики можно получить, используя активные фильтры - ОУ с частотно-зависимой обратной связью.
Рассмотрим несколько измененную схему инвертирующего усилителя с реактивным сопротивлением Z во входной цепи и импедансом Z0 в цепи обратной связи (рис. 5.5).
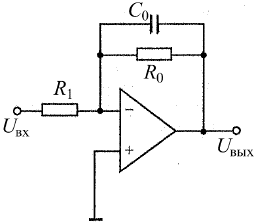
Рисунок 5.5
Комплексный коэффициент усиления такой схемы K = Uвых/Uвх =-Z0/Z. Когда импеданс обратной связи образован параллельно включенными резистором R0 и конденсатором С0, величина Z0 = R0/(1 + jω R0 C0).
Заменяя R0C0 = 1/ω0 = 1/2πf0 и полагая, что импеданс Z = R, получаем, что комплексный коэффициент усиления
 (5.1)
(5.1)
где
 (5.2)
(5.2)

В логарифмическом масштабе нормированное соотношение (5.2) запишется в виде

Эта зависимость - логарифмическая амплитудно-частотная характеристика - изображена на рис. 5.6 линией 1:
 ,
,

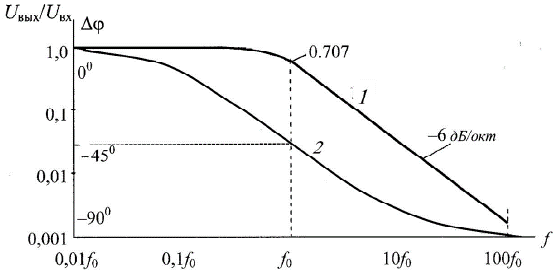
Рисунок 5.6
Излом этой характеристики соответствует f = f0 , а наклон крутой части составляет 20 lg 2 = 6 дБ/окт, или 20 lg 10 = 20 дБ/дек. Заметим, что точное значение нормированной характеристики в точке f=f0 равно 1/√2 (т.е. -3 дБ).
Кривая 2 на рис. 5.6 представляет частотную зависимость фазового сдвига: ∆φ = 0 при f ≤ 0,1/f0; ∆φ = -450[1+lg(f/f0)] при 0.1f0 ≤ f ≤ 10f0; ∆φ = -900 при f ≥ 10f0. В точке излома f = f0 отклонение ∆φ = -450, абсолютная величина наклона составляет 45°lg2 = 13,55 град/окт или 45°lg10 = 45 град/дек.
[При построении частотных характеристик значение числа N в децибелах (дБ) равно 20lg10N, октава и декада соответствуют двукратному и десятикратному изменению частоты.]
Соотношение (5.2) определяет амплитудно-частотную характеристику фильтра нижних частот, а именно - фильтра Баттерворта. Этот тип фильтра имеет максимально плоскую характеристику в полосе пропускания. Другие распространенные типы активных фильтров нижних частот - фильтры Чебышева и Бесселя.
Заметим, что при замене –(R0/R) = a0, 1 = b0, 1/R0C0 = b1, p = jω комплексный коэффициент усиления (5.1) записывается в виде: K = a0/(b0+ pb1),
что представляет собой частный случай более общего соотношения:
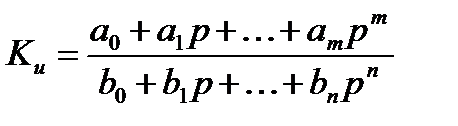 ,
,
описывающего характеристику рекурсивного фильтра.
Основное преимущество активных фильтров - очень низкий выходной импеданс, что позволяет каскадировать подобные схемы и добиваться требуемых частотных характеристик.
Контрольные вопросы
1 Преимущества измерительной системы, использующей для передачи сигнала ток и датчик, гальванически изолированный от выходного сигнала
2 Назначение схемы фильтрации измерительного тракта
3 Смысл эффекта наложения спектров
4 Опишите схему, реализующую пассивный фильтр
5 Опишите схему, реализующую активный фильтр
6 В чем заключается различие между пассивным и активным фильтром
Лекция 6 Мультиплексоры аналоговых сигналов. Схемы выборки и хранения
Детекторы
Существуют датчики, выходной сигнал которых представляет собой модулированное колебание определенной частоты. Извлечение информации из такого сигнала основано на детектировании - процессе выделения модулирующего сигнала на фоне «несущей».
Фазовый детектор
Фазовый детектор - устройство, которое осуществляет сравнение двух входных частот и формирует выходной сигнал, пропорциональный их фазовой разности. Самый простой фазовый детектор - схема ИСКЛЮЧАЮЩЕЕ ИЛИ с RC-цепочкой на выходе. Его выходное напряжение линейно зависит от фазовой разности опорного и исследуемого сигналов (импульсных), подаваемых на входы схемы.
Фазовый детектор второго типа, чувствительный к взаимному расположению фронтов опорного и исследуемого сигналов, можно построить на основе операционного усилителя, используя его в качестве инвертора (рис. 7.1).
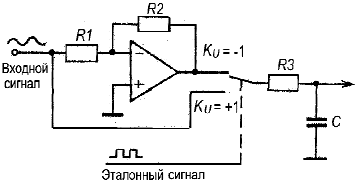
Рисунок 7.1
Для того чтобы проанализировать работу такого фазового детектора, допустим, что на его вход подается сигнал Acos(ω0+θ) и опорный сигнал представляет собой прямоугольное колебание, причем изменение полярности опорного сигнала происходит в моменты перехода через нуль функции sinω0t. Предположим далее, что выходной сигнал усредняется с помощью фильтра низких частот, постоянная времени которого превышает величину одного периода T = 2π/ω0. Тогда можно показать, что в этом случае усредненный выходной сигнал будет пропорционален амплитуде А и синусу относительного сдвига фаз.
Микроконтроллеры
Микроконтроллер - это законченная микропроцессорная система обработки информации, реализованная в виде БИС и объединяющая в пределах одного полупроводникового кристалла центральный процессор, постоянное запоминающее устройство (ПЗУ), основную память - оперативное запоминающее устройство (ОЗУ) и устройства ввода/вывода информации.
Однокристальному микроконтроллеру (ОМК) присущи следующие особенности:
- система команд ориентирована на выполнение задач управления и регулирования;
- алгоритмы, которые реализуются на ОМК, могут иметь много разветвлений в зависимости от внешних сигналов;
- данные, с которыми оперируют ОМК, имеют небольшую разрядность;
- схемная реализация систем управления на базе ОМК является несложной и имеет невысокую стоимость;
- универсальность и возможность расширения функций управления значительно ниже, чем в системах с однокристальными микропроцессорами.
Все ОМК одного семейства содержат в себе одинаковый базовый функциональный блок и различные изменяемые функциональные блоки. Базовый блок принято называть процессорным ядром ОМК.
В состав процессорного ядра входят:
- центральный процессор;
- внутренние шины адреса, данных и управления;
- схемы синхронизации, формирующие многофазные импульсные последовательности для тактирования центрального процессора и шин;
- схема управления режимами работы ОМК.
Ядро современных ОМК реализуют как на основе CISC-, так и на основе RISC-архитектуры.
ОМК с CISC-архитектурой имеют однобайтовый, двухбайтовый и трехбайтовый (реже четырехбайтовый) формат команд. Выборка команды из памяти осуществляется побайтно в течение нескольких машинных циклов. Время выполнения каждой команды с учетом времени выборки в большинстве случаев составляет от 1 до 10 циклов.
ОМК с RISC-архитектурой имеет фиксированный формат команды (12, 14 или 16 бит). Выборка из памяти и исполнение подавляющего большинства команд осуществляется за один машинный цикл.
Модульная структура ОМК показана на рис. 13.1. Изменяемый функциональный блок включает модули основной и постоянной (ОЗУ и ПЗУ) памяти, генератор схемы синхронизации (Г) и модули внешних устройств. К внешним устройствам обычно относятся: порты ввода/вывода, таймеры, аналого-цифровые преобразователи (АЦП), контроллеры последовательного ввода/вывода (К).
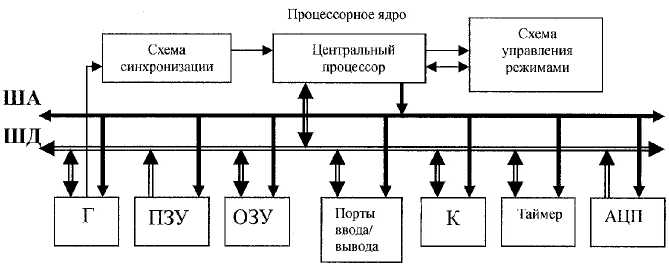
Рисунок 13.1
В последних разработках в состав изменяемых модулей включают модули контроля за напряжением питания и ходом выполнения программы и модули внутрисхемной отладки и программирования.
Каждый модуль имеет выводы для подключения его к шинам адреса (ША) и данных (ШД) процессорного ядра.
Микропроцессоры
Структура микропроцессора i8086
Микропроцессор i8086 - это 16-разрядное устройство с быстродействием до 2,5 млн. оп/с и объемом адресуемой памяти 1 Мбайт. Он ориентирован на параллельное выполнение циклов исполнения команд и выборки последующих команд и условно может быть разделен на две части, работающие асинхронно: устройство обработки операндов и устройство обработки команд.
Устройство обработки операндов предназначено для выполнения операций по обработке данных. В функции устройства обработки команд входит: формирование 20-разрядного физического адреса памяти, выборка команд и операндов из памяти, организация очередности команд, запоминание результатов выполнения команд в памяти.
В состав микропроцессора входят следующие блоки и устройства (рис. 15.3):
1) арифметико-логическое устройство (АЛУ);
2) устройство управления, содержащее:
- буфер команд - регистровую память объемом 6 байт, предназначенную для хранения очереди команд (команды, выполняемой в данный момент) и заполняющуюся очередными командами, считываемыми из основной памяти по мере освобождения;
- дешифратор операций (ДшОп);
- блок управления операциями (БУОп), который формирует управляющие сигналы для всех блоков микропроцессора в соответствии с расшифрованным кодом операции;
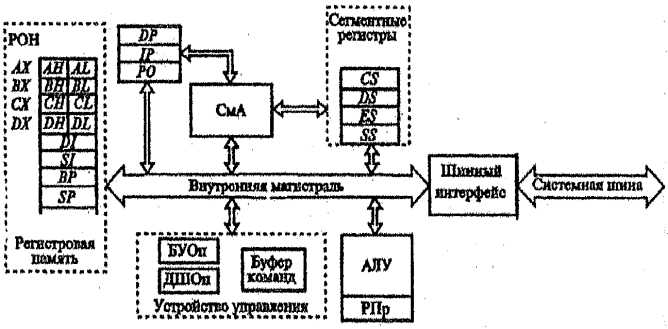
Рисунок 15.3
3) внутренняя регистровая память, состоящая из восьми регистров общего назначения (РОН), четыре из которых допускают раздельное использование младших и старших разрядов, что позволяет работать как с байтами, так и с 16-разрядными словами;
4) регистр адреса команды (указатель команд IP), в который помещается смещение адреса выполняемой команды относительно базового адреса;
5) регистр адреса данных (указатель данных DP), определяющий смещение адреса данных относительно базового адреса;
6) регистр признаков (РПр), содержащий признаки результата выполненной команды (получение нулевого результата, получение отрицательного результата, наличие переноса из третьего разряда в четвертый или займа из четвертого разряда в третий младшего байта 16-разрядного числа (используется командами десятичной арифметики), наличие переноса из старшего бита числа в знаковый разряд при сложении или вычитании, наличие переполнения, четность числа единиц в коде результата) и дополнительную управляющую информацию;
7) блок из четырех сегментных регистров, содержащих базовые адреса оперативной памяти: кодового сегмента CS, где содержится программа; сегмента данных DS; сегмента стека SS и дополнительного сегмента данных ES;
8) сумматор адреса (СмА);
9) регистр обмена (РО);
10) шинный интерфейс - схемы, обеспечивающие связь внутренней магистрали микропроцессора с системной шиной.
Система команд микропроцессора содержит 135 команд, которые по функциональному назначению делятся на команды передачи данных, арифметические, поразрядной обработки данных, обработки строк данных, передачи управления, управления процессором.
Команды передачи обеспечивают пересылку операнда- источника на место операнда-приемника без содержательного преобразования. Арифметические команды (сложение, вычитание, умножение, деление, преобразование форматов) выполняют операции над 8- и 16-разрядными целыми двоичными числами с фиксированной и плавающей точками и двоично-десятичными числами. Команды поразрядной обработки предназначены для выполнения логических операций булевой алгебры, операции линейных и циклических сдвигов вправо и влево. Команды обработки строк позволяют обрабатывать как числа, так и тексты (длина обрабатываемых строк может достигать 64 Кбайт). Команды передачи управления позволяют осуществлять безусловные переходы, вызовы и возвраты, условные переходы, управление циклами и обслуживание прерываний. Команды управления процессором изменяют состояния определенных разрядов регистров признаков и используются для синхронизации работы с внешними событиями и процессорами.
Система команд - двухадресная, поэтому в ее составе нет команд, в которых оба операнда извлекаются из основной памяти. Допустимы только следующие сочетания: RR, RS, RI, SI (R - регистр регистровой памяти, S - оперативная память, I - операнд, заданный в адресном поле команды). При обращении к регистровой памяти указывается номер регистра; при обращении к основной памяти исполнительный (физический) 20-разрядный адрес формируется путем сложения эффективного адреса с увеличенным в 16 раз содержимым определенного сегментного регистра.
Эффективный адрес может
- быть частью команды;
- находиться в одном из регистров BX, DI, SI;
- быть равен сумме содержимого одного из:
регистров BX, BP, DI, SI и 8- или 16-разрядного смещения;
базовых регистров (BX, BP) и одного из индексных регистров (DI, SI);
базовых регистров (BX, BP), одного из индексных регистров (DI, SI) и 8- или 16-разрядного смещения.
Микропроцессор i80386
Этот микропроцессор стал родоначальником семейства 32-разрядных схем и принятые в нем архитектурные решения до настоящего времени остаются характерными для последующих микропроцессоров фирмы Intel.
Микропроцессор i80386 оптимизирован для многозадачных ОС и для совместной работы пользователей, использующих разные ОС. Эти возможности поддерживаются архитектурой со встроенными устройствами управления памятью и защиты.
Микропроцессор содержит шесть блоков, реализующих выполнение команд, сегментацию, страничную организацию памяти, сопряжение с шинами, декодирование и упреждающую выборку команд (рис. 15.4). Все эти блоки и устройства работают в режиме конвейера: во время выполнения одной команды декодируется вторая и из памяти выбирается третья. Дополнительным средством повышения производительности служит специальный блок быстрого умножения/деления.
Блоки сегментации и управления страницами позволяют управлять логическим адресным пространством, обеспечивая перемещаемость программ и данных и эффективное распределение памяти между задачами пользователей. Для этого память организована в виде одного или нескольких блоков - сегментов, каждый из которых, в свою очередь, разделяется на одну или несколько страниц.
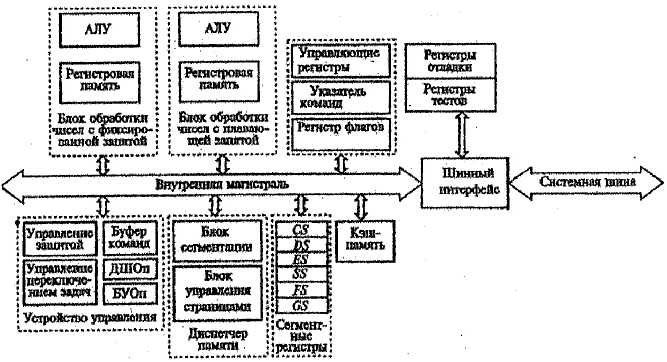
Рисунок 15.4
Сегмент - это часть адресного пространства переменного размера, которая выделяется программе. Каждый сегмент имеет свой дескриптор (описатель), содержащий базовый адрес сегмента, размер сегмента, тип информации (стек, программа, данные) и поле прав доступа.
В микропроцессоре имеется 32 регистра: регистры общего назначения, сегментные, указатель команд и флаги, управления, системных адресов, отладки, тестов. Эти регистры являются расширением регистров микропроцессора i8086.
В восьми 32-разрядных РОН хранятся адреса и данные, в шести сегментных регистрах - значения селекторов, указывающих адресуемые в данный момент сегменты памяти (один - текущий сегмент программы, один - текущий стековый сегмент, четыре - сегменты данных).
Указатель команд содержит смещение адреса следующей команды относительно базового адреса сегмента, где хранятся коды команд программы. Регистр флагов имеет то же назначение, что и в микропроцессоре i8086.
Внутренняя кэш-память включается между регистрами процессора и оперативной памятью; она хранит наиболее часто используемую информацию (команды и данные). В различных моделях микропроцессоров емкость внутренней кэш-памяти находится в диапазоне от 8 Кбайт до 128 Кбайт.
Контрольные вопросы:
1 Перечислите основные узлы, входящие в структурную схему ОМК с интегрированными устройствами высокоскоростного ввода/вывода.
2 Режимы работы универсальных каналов захвата/сравнения в процессоре событий.
3 Блоки, входящие в состав микропроцессора i8086
4 Система команд микропроцессора i8086
5 Назначение блоков, входящих в состав микропроцессора i8386
Тема 6 СРЕДСТВА СВЯЗИ
Канальный уровень передачи
На канальном уровне решаются задачи формирования кадров, защиты от ошибок и управления доступом к среде передачи. Для этих целей разработаны специальные протоколы.
Протокол высокоуровневого управления каналом передачи данных (High-Level Data Link Control - HDLC) разработан ISO и используется в качестве основы для других протоколов.
Управляющие поля в кадре HDLC имеют фиксированное расположение и длину; переменную длину имеет только поле данных. Ограничивающие начальный и заключительный флаги кодируются уникальной последовательностью 01111110. Для обеспечения уникальности такой последовательности передатчик автоматически вставляет 0 после пяти идущих подряд 1 во все поля, кроме флагов. Приемник удаляет любой 0, следующий непосредственно за пятью идущими подряд 1.
Адресное поле имеет смысл только в том случае, если несколько станций могут принимать одно и то же сообщение - например, в локальных сетях, где все станции разделяют общий физический тракт передачи.
Управляющее поле определяет тип кадра: информационный, супервизорный или ненумерованный. Информационный кадр содержит пользовательские данные; его управляющее поле идентифицирует порядковый номер текущего и следующего кадров. Супервизорный кадр используется для координации действий приемника и передатчика и выполняет управляющие функции - подтверждение кадров (квитирование), запрос на повторную передачу информационного кадра, если нарушена последовательность кадров. Ненумерованные кадры используются для инициализации и разъединения звена и для других целей управления.
Поле данных может иметь любую длину. Поле контрольной суммы вычисляется с помощью многочлена х1б+х12+х5+1.
Структура кадра HDLC соответствует семиуровневой структуре ВОС: начальный и заключительный флаги необходимы на физическом и канальном уровнях; адресное и управляющее поля и поле контрольной суммы относятся к 2-му и 3-му уровням; передаваемые данные - к 7-му.
Протокол телеметрии IEC-870 - широко распространенный стандарт для мониторинга и управления распределенными процессами. В протоколе телеметрии IEC-870 единицей передачи информации является телеграмма, состоящая из байтовых последовательностей по 8 бит. Каждый байт передается в виде 11-битовой последовательности (1 стартовый бит, 8 бит данных, 1 бит четности, 1 бит стоповый). Кадры передаются последовательно в каждой телеграмме в следующем порядке:
- заголовок (1 или 4 байта);
- пользовательские данные (переменная длина, до 253 байт);
- контрольная сумма (1 байт);
- символ конца сообщения (1 байт).
Заголовок указывает, какой тип телеграммы следует за ним - фиксированной или переменной длины. Телеграмма фиксированной длины имеет длину 6 байт. В телеграмме переменной длины заголовок содержит начальный байт, за которым следует длина телеграммы. В четырех байтах заголовка в качестве меры безопасности повторяются начальный символ и длина сообщения. В пользовательских данных два байта отведено для указания адреса, затем следуют данные.
Контрольные вопросы
1 Расскажите о модели взаимодействия открытых систем.
2 Какие существуют три основные структуры сетевого обмена?
3 Нарисуйте амплитудную, фазовую и частотную манипуляцию.
4 Почему бод не всегда совпадает с битом?
5 Нарисуйте временное и частотное мультиплексирование.
6 Что такое «полевая шина»?
7 Расскажите о работе шины Bitbus.
8 Расскажите о работе шины Profibus.
9 Как работает метод множественного доступа с прослушиванием несущей?
10 Какой принцип доступа осуществляется в маркерной шине?
11 Как работает сеть с маркерным кольцом?
12 Расскажите о работе сети CAN.
13 Как работает шина USB?
Операционные системы
Операционные системы реального времени (ОС РВ) характеризуются тем, что значение времени принятия решения используется как одна из переменных, от которых зависит результат. То есть при опоздании результатов они либо могут быть бесполезными, либо ущерб в результате опоздания может быть бесконечно велик. Основная задача операционных систем общего назначения - эффективное разделение ресурсов ЭВМ между несколькими одновременно выполняющимися программами. Операционные системы реального времени разрабатываются в расчете на наличие внешних источников данных. Основная задача ОС РВ - своевременно обработать запрос; все остальные аспекты функционирования ЭВМ отходят на второй план.
Напомним, что существуют системы «мягкого» и «жесткого» реального времени. Поэтому иногда говорят, что та или иная ОС «мягкая» или «жесткая». Нет «мягких» и «жестких» ОС. Одна и та же ОС РВ может лишь служить основой для построения таких систем.
По своей внутренней структуре ОС можно условно разделить на монолитные ОС, ОС на основе микроядра (модульные) и объектно-ориентированные ОС.
В монолитных ОС (рис. 23.1) все обрабатывающие программы сосредоточены вместе в едином процессе, которое исполняется в едином адресном пространстве.
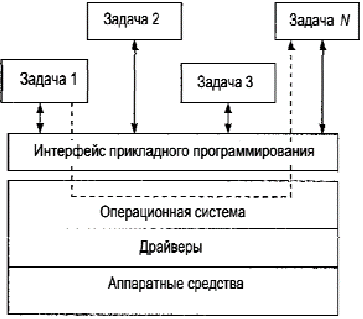
Рисунок 23.1
Монолитные архитектуры можно представить в виде прикладного уровня, состоящего из работающих прикладных процессов, и системного уровня, состоящего из монолитного ядра. В нем можно выделить следующие части: интерфейс между приложениями и ядром, собственно ядро и интерфейс между ядром и оборудованием (драйверы устройств). Интерфейс в таких системах играет двойную роль:
- управление взаимодействием функциональных задач с операционной системой;
- обеспечение непрерывности выполнения программ операционной системы.
Основное преимущество монолитной архитектуры - относительная быстрота работы по сравнению с другими архитектурами за счет написания значительных частей системы на языке ассемблера.
Недостатки монолитной архитектуры:
- системные вызовы, требующие переключения уровней привилегий (от пользовательской задачи к ядру), должны быть реализованы как прерывания или специальный вид исключения, что сильно увеличивает время их работы;
- ядро не может быть прервано пользовательской задачей; это может приводить к тому, что высокоприоритетная задача может не получить управления из-за работы низкоприоритетной;
- сложность переноса системы на новые архитектуры процессора из-за значительных ассемблерных вставок;
- недостаточная гибкость и сложность развития: изменение части ядра требует его полной перекомпиляции.
Поскольку в такой системе невозможно выполнение системных вызовов в то время, когда реализуется какой-либо поток ядра, режим реального времени невозможен.
Модульная (микроядерная) архитектура (рис. 23.2) является альтернативой классическому способу построения ОС. Она была разработана с целью убрать интерфейс между приложениями и ядром и облегчить модернизацию системы и перенос ее на новые процессоры. В микроядерных ОС в привилегированном режиме остается работать только очень небольшая часть ОС, называемая микроядром. При такой структуре микроядро выполняет две основные функции:
- управление взаимодействием частей системы (например, менеджеров процессов и файлов);
- обеспечение непрерывности выполнения ядра ОС (то есть отсутствие переключения задач во время выполнения микроядра).
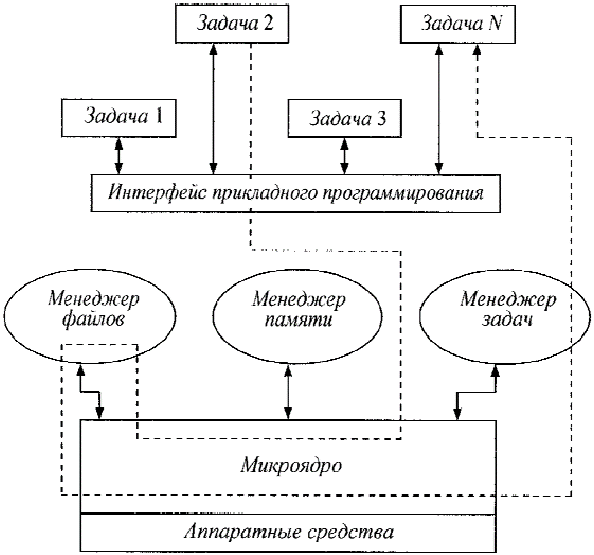
Рисунок 23.2
Микроядерные ОС удовлетворяют большинству требований, предъявляемых к современным ОС, обладая переносимостью (легкостью переноса с одной аппаратной платформы на другую), расширяемостью (добавление и изменение функций), надежностью (защита серверов ОС друг от друга) и создавая хорошие предпосылки для поддержания распределенных приложений. За эти достоинства приходится платить снижением производительности, что является основным недостатком микроядерной архитектуры.
В микроядерной архитектуре ядро отвечает только за базовые примитивы ОС (создание и уничтожение потоков, диспетчеризация и синхронизация потоков, поддержка механизма прерываний, часов и таймеров). Это действительно микроядро, так как его объем, например, в системе QNX, всего 12 Кбайт. Все остальные компоненты системы: драйверы, файловые системы, стеки протоколов, пользовательские приложения - выполняются вне пределов ядра как отдельные процессы, каждый в своем защищенном адресном пространстве. Программы, реализующие эти сервисные функции, называются администраторами ресурсов. Все эти компоненты используют для общения друг с другом единый, четко детерминированный механизм - обмен сообщениями. Он образует между компонентами системы виртуальную «программную шину», позволяющую подключать к ней или, наоборот, отключать любой компонент на лету. Связь между микроядром и администраторами ресурсов осуществляется с помощью администратора процессов.
Недостатки модульной структуры фактически те же, что и у монолитной. Проблемы перешли с уровня интерфейса на уровень микроядра. Системный интерфейс по-прежнему не допускает переключения задач во время работы микроядра, только сократилось время пребывания в этом состоянии, проблемы с переносимостью ядра уменьшились (в связи с сокращением его размера), но остались.
В объектно-ориентированной ОС (рис. 23.3) все системные процессы распределены по отдельным администраторам, которые включаются менеджером прерываний и менеджером задач.
Объектная архитектура строится на основе объектов - микроядер. В ней интерфейс между приложениями и ядром отсутствует вообще. Взаимодействие между компонентами системы (микроядрами) и пользовательскими процессами осуществляется посредством обычного вызова функций, поскольку и система, и приложения написаны на одном языке. Это обеспечивает максимальную скорость системных вызовов. Фактическое равноправие всех компонент системы обеспечивает возможность переключения задач в любое время. Объектно-ориентированный подход обеспечивает модульность, безопасность, легкость модернизации и повторного использования кода.
В отличие от предыдущих систем, не все компоненты самой операционной системы должны быть загружены в оперативную память. Если микроядро уже загружено для другого приложения, то оно повторно не загружается, а используется код и данные уже имеющегося микроядра. Поскольку разные приложения разделяют одинаковые микроядра, то они должны работать в одном адресном пространстве. Следовательно, система не может использовать виртуальную память и поэтому работает быстрее, так как исключаются задержки на трансляцию виртуального адреса в физический.
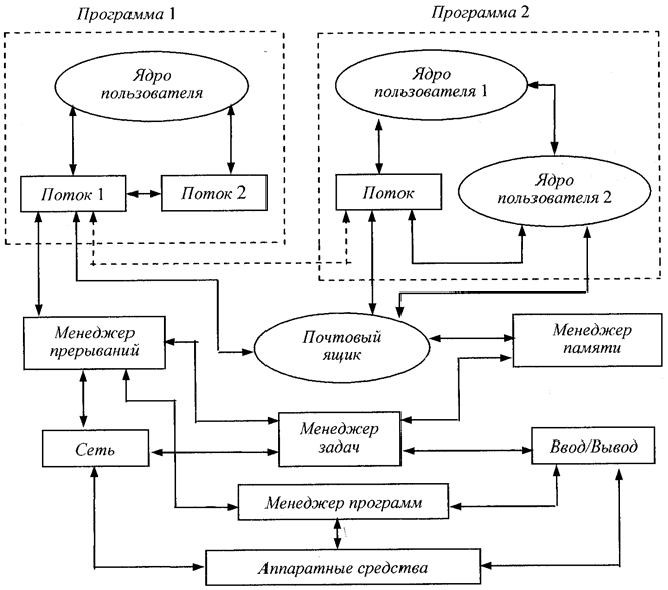
Рисунок 23.3
При описании работы программного обеспечения важное значение имеет понятие задачи. Задача - это набор операций, предназначенный для выполнения логически законченной функции системы. Задача конкурирует с другими задачами за получение контроля над ресурсами вычислительной системы. Различают две разновидности задач: процессы и потоки.
Процесс - это отдельный загружаемый программный модуль (файл), который во время исполнения имеет в памяти свои независимые области для кода и данных. Процесс - это выполняемая программа. Процесс включает код и данные программы, а также различную дополнительную информацию - переменные системного окружения и т.п.
Поток - это отдельный загружаемый программный модуль (файл), который может использоваться общими участками кода и данных в рамках единого программного модуля. Поток - это фрагмент процесса, содержащий непрерывную последовательность команд, которые могут выполняться параллельно с другими потоками того же и других процессов.
Процесс является, по сути дела, контейнером потоков и содержит как минимум один поток.
К преимуществам потоков можно отнести:
- экономию ресурсов как внешней, так и внутренней памяти, так как множество потоков может размещаться внутри одного ЕХЕ-модуля;
- использование потоками общей области памяти, что позволяет эффективно организовать межзадачный обмен сообщениями (достаточно передать указатель на сообщение). Процессы не имеют общей области памяти, поэтому ОС должна либо целиком скопировать сообщение из области памяти одной задачи в область памяти другой (что для больших сообщений весьма накладно), либо предусмотреть специальные механизмы, которые позволили бы одной задаче получить доступ к сообщению из области памяти другой задачи;
- меньше время переключения между задачами-потоками, чем между задачами-процессами, так как, как правило, контекст потоков меньше, чем контекст процессов;
- значительное упрощение использования программ- отладчиков, так как все потоки, а иногда и само ядро ОС РВ размещаются в одном ЕХЕ-модуле.
К недостаткам потоков можно отнести то, что:
- как правило, потоки не могут быть подгружены динамически. Чтобы добавить новый поток, необходимо провести соответствующие изменения в исходных текстах и перекомпилировать приложение. Процессы, в отличие от потоков, подгружаемы, что позволяет динамически изменять функции системы в процессе ее работы. Кроме того, так как процессам соответствуют отдельные программные модули, они могут быть разработаны различными компаниями, чем достигается дополнительная гибкость и возможность использования ранее наработанного программного обеспечения;
- потоки имеют доступ к областям данных друг друга, это может привести к ситуации, когда некорректно работающий поток способен испортить данные другого потока. В отличие от этого процессы защищены от взаимного влияния, а попытка записи в «не свою» память приводит, как правило, к возникновению специального прерывания по обработке «исключительных» ситуаций.
Контрольные вопросы:
1 Чем характеризуются операционные системы реального времени (ОС РВ)?
2 Классификация систем реального времени.
3 Охарактеризуйте монолитные ОС.
4 Основное преимущество и недостатки монолитной архитектуры ОС РВ.
5 Охарактеризуйте модульную (микроядерную) архитектуру построения ОС.
6 Преимущества и недостатки модульной структуры ОС.
7 Охарактеризуйте объектно-ориентированную ОС.
8 Дайте определение понятия задачи при описании работы программного обеспечения.
9 Дайте определение понятиям процесс, поток.
10 Преимущества и недостатки потоков
Основные свойства задач
Как правило, вся важная с точки зрения ОС информация о задаче (имя и номер задачи, верхняя и нижняя границы стека, ссылка на очередь сообщений, статус задачи, приоритет и т.п.) хранится в унифицированной структуре данных - управляющем блоке (Task Control Block - TCB).
Приоритет - целое число, присваиваемое задаче и характеризующее ее важность по сравнению с другими задачами, выполняемыми в системе. Приоритет используется, в основном, планировщиком задач для определения того, какая из готовых к работе задач должна получить управление. Различают системы с динамической и статической приоритетностью. В первом случае приоритет задач меняется в процессе исполнения, во втором - жестко задается на этапе разработки или во время начального конфигурирования системы.
Контекст задачи - набор данных, содержащий всю необходимую информацию для возобновления выполнения задачи с того места, где она была ранее прервана. Часто контекст хранится в ТСВ и включает в себя такие данные как содержимое счетчика команд, указатель стека, содержимое регистров процессора и т.п. Планировщик задач в случае необходимости сохраняет контекст текущей активной задачи и восстанавливает контекст задачи, назначенной к исполнению. Такое переключение контекстов и является, по существу, основным механизмом ОС РВ при переходе от выполнения одной задачи к выполнению другой.
Состояние (статус) задачи - режим использования задачи: активная задача - задача, выполняемая системой в данный момент времени; готовая задача - задача, готовая к выполнению и ожидающая у планировщика своей очереди; блокированная задача - задача, выполнение которой приостановлено до наступления определенных событий (освобождение ресурса, поступление ожидаемого сообщения, завершение интервала ожидания и т.п.).
Пустая задача - задача, запускаемая самой ОС, когда в системе нет готовых для выполнения задач. Пустая задача запускается с самым низким приоритетом и, как правило, представляет собой бесконечный цикл «ничего не делать». Наличие пустой задачи представляет ОС удобный механизм отработки ситуаций, когда нет ни одной готовой к выполнению задач.
Как правило, многозадачные ОС позволяют запускать несколько копий одной и той же задачи. При этом для каждой такой копии создается свой ТСВ и выделяется своя область памяти. В целях экономии памяти может быть предусмотрено совместное использование одного и того же исполняемого кода для всех запущенных копий. В этом случае программа должна обеспечивать повторную входимость (реентерабельность). Кроме того, программа не должна использовать временные файлы с фиксированными именами и должна корректно осуществлять доступ к глобальным ресурсам.
Повторная входимость (реентерабельность) позволяет без негативных последствий временно прервать выполнение какой-либо функции или подпрограммы, а потом вызвать эту функцию или подпрограмму снова. Частным случаем реентерабельности является рекурсия, когда тело подпрограммы содержит вызов самой себя. Классическим примером нереентерабельности является DOS, а типичной причиной нереентерабельности служит использование глобальных переменных.
Предположим, что у нас есть функция, реализующая запись на диск, и пусть она использует глобальную переменную WRITE_SECTOR, которая устанавливается в соответствии с параметром, передаваемым этой функции при вызове. Предположим, что задача А вызывает эту функцию с параметром 3, т.е. хочет записать данные в сектор 3. Допустим, что когда переменная WRITE_SECTOR уже равна 3, но сама запись еще не произведена, выполнение задачи А прерывается и начинает выполняться задача В, которая вызывает ту же функцию, но с аргументом 10. После того, как запись в сектор 10 будет произведена, управление рано или поздно вернется к задаче А, которая продолжит работу с прерванного места. Однако теперь переменная WRITE_SECTOR равна 10, и все данные задачи А будут записаны в сектор 10. Из приведенного примера видно, что ошибки, связанные с нереентерабельностью, трудно обнаружить, а последствия они могут вызвать самые катастрофические.
Организация счёта времени
Управление ходом вычислительного процесса в режиме реального времени подразумевает выдачу сигналов включения и отключения определённых подпрограмм в заданные моменты. Это достигается путём использования в процессе вычислений счёта времени.
Счёт времени, или счётчики времени (СчВр) можно организовать различными способами, которые требуют различных затрат ресурсов, и при больших программных комплексах выбор того либо иного способа может влиять на производительность и надёжность ЭВМ или информационно-вычислительного комплекса (объединение рабочих станций и ЭВМ). Выделяют три способа организации СчВр: программный, аппаратный и смешанный. Основой счёта времени при любом из способов являются метки времени - сигналы генератора стабильной частоты Г. Они поступают на входы счётчиков непосредственно или через схему пересчёта.
Программный способ не требует специального оборудования. В этом случае сигналы прерывания генератора Г поступают в схему прерывания ЭВМ, причём данный канал имеет наивысший приоритет. По сигналу прерывания приостанавливается выполнение текущей программы, включаются подпрограммы СчВр, контроля состояния и передачи управления. Первые две программы выполняются для каждого программного счётчика при поступлении каждой метки времени, третья - передачи управления - в случае необходимости. Счётчиками времени при данной организации являются определённые ячейки ОП.
Период включения подпрограммы счёта времени Тс.в определяется частотой следования меток времени и зависит от требуемой точности управления. Подпрограмма счёта времени прибавляет или вычитает 1 из слов памяти, в которых организуются счётчики. Подпрограмма контроля сравнивает, не достигли ли значения счётчиков заданного значения. В случае достижения выполняется подпрограмма передачи управления. Она реализует функции подготовки заявок на включение программ, формирование признаков их включения и пр.
Любые изменения временных диаграмм решения задач при рассматриваемом способе организацию управления требуют дополнительного программирования.
Аппаратный способ организации требует увеличения объёмов аппаратуры по сравнению с программным. Устройство, реализующее аппаратный способ формирования временной диаграммы, состоит из схемы счёта времени и формирования сигналов о состояниях счётчиков, схемы формирования сигналов управления ходом вычислительного процесса и схемы управления. Возможны различные варианты построения этих схем.
Код, подаваемый i-й регистр в момент установки счётчика, должен представлять значение времени, являющееся суммой заданного интервала включения i-й программы Ti и текущего значения времени, описываемое текущим состоянием счётчика меток времени. То есть, в данной схеме на этапе подготовки информации для записи в счётчики, перед заданием каждого периода включения программы, ЭВМ необходимо вычислять код, который подаётся на регистр.
Выбор того или иного варианта построения схемы счёта времени и формирования сигналов о предельных состояниях счётчиков определяется наличием соответствующих БИС и микропроцессоров.
Структурная схема формирования сигналов управления на основе регистров состоит из регистров адреса и схем «И», разрешающих запись в регистр и считывание из регистра. В исходный момент времени i-й регистр устанавливается в нулевое состояние подачей сигнала «Уст. 0» по соответствующей шине. Затем, одновременно с установкой заданного кода времени в i-й счётчик схемы счёта времени, в данный регистр по разрешающему сигналу шины «Уст. адр.» записывается адрес перехода на включаемую программу. Сигнал нулевого состояния i-го счётчика времени (когда заданный интервал времени истек), поступающий из схемы счёта времени, считывает из регистра адрес, который по шине «Выд. адр.» передаётся в устройство управления.
Аппаратный способ требует значительно меньших затрат времени в цикле работы ЭВМ. ЭВМ должна записать в ОП коды, устанавливаемые в регистрах и на счётчиках схемы счёта времени, а также коды адресов переходов, заносящихся в регистры адресов схемы формирования сигналов управления. Данная подготовка информации производится однократно на интервале 100 циклов и более. (При втором варианте схемы построения счёта времени необходимо вычислять код, подаваемый на регистр кода времени перед заданием каждого периода включения.) Другая составляющая работы ЭВМ со счётчиками - выполнение прерывания при включении подпрограмм. Оно производится только по завершению интервала включения каждой из подпрограмм. При программном же способе обработка прерываний и показаний счётчиков в ОП производится по поступлению каждой метки времени, то есть, для программного способа организации счёта времени требуется больше машинного времени.
Программно-аппаратный способ организации СчВр сочетает достоинства аппаратного и программного способов: значительно сокращает время на выполнение программ счёта и управления и незначительно увеличивает затраты аппаратуры. Можно предложить много вариантов реализации этого способа. Каждый вариант должен учитывать специфику конкретной используемой ЭВМ. Рассмотрим пример реализации программно-аппаратного способа формирования сигналов управления (рис. 27.1).
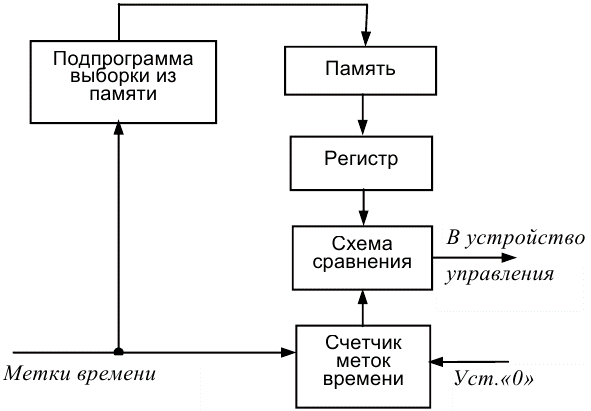
Рисунок 27.1
Схема такого устройства работает следующим образом. С поступлением на счётный вход счётчика очередной метки времени он устанавливается в новое состояние. Этот же сигнал включает подпрограмму, которая выбирает из памяти последовательно коды заданных моментов времени, соответствующих временной диаграмме (временам включения программ). Эти коды последовательно поступают на регистр и сравниваются с содержимым счётчика.
Признак совпадения кодов направляется в устройство управления, где используется для формирования команды перехода. Здесь ЭВМ освобождается от необходимости после поступления каждой метки времени программным способом сравнивать состояния счётчика с временами включения программ и программно увеличивать или уменьшать на единицу слова памяти, отведённые под СчВр. Это делает аппаратура. На программное обеспечение ЭВМ ложатся только функции включения подпрограммы выдачи массива после поступления очередной метки времени и последовательной передаче кодов моментов времени на регистр.
Выбор того или иного способа организации СчВр может производиться на основе анализа затрат на единицу времени работы ЭВМ, затрат на создание и эксплуатацию аппаратуры. При определённых условиях вопрос выбора рационального принципа построения временной диаграммы может решаться исходя из реальных возможностей ЭВМ. Например, если ЭВМ не имеет достаточной производительности, то единственно возможным способом является аппаратный, поскольку замена типа процессора или увеличение их количества в составе средств вычислительной техники приводит к большим затратам по сравнению с затратами на аппаратуру счётчиков.
Итак, счётчики времени в ЭВМ считают метки времени, которые формируются Г, входящим в состав ЭВМ. Эта система - «внутренние часы» ЭВМ. В других объектах системы управления тоже могут быть свои «внутренние часы». Во многих случаях для обеспечения управления необходимо обеспечить взаимную синхронизацию «внутренних часов» разных компонентов АСУ. Для этого все часы «привязываются» к единому астрономическому времени. Это значит, что периодически в определённые моменты астрономического времени все «внутренние часы» устанавливаются в соответствующее состояние, после чего работают автономно до следующего момента корректировки.
Корректирующие сигналы единого времени посылаются в эфир специальными радиотехническими средствами - станциями сигналов единого времени (СЕВ). Каждая станция имеет расписание излучаемых частот и времени работы. Настраивая приёмник системы управления в определённый интервал времени на определённую частоту, устанавливают связь со станцией СЕВ, по которой затем производится привязка. При коррекции СчВр учитывается задержки СЕВ при распространении радиоволн по эфиру и в приёмном тракте.
Контрольные вопросы:
1 Охарактеризуйте причины прерываний, возникающих в ЭВМ.
2 Перечислите основные функции и характеристики системы прерывания.
3 Назначения вектора прерывания.
4 Что подразумевает управление ходом вычислительного процесса в режиме реального времени?
5 Способы организации счётчиков времени (СчВр).
6 Опишите программный способ организации счётчиков времени (СчВр).
7 Опишите аппаратный способ организации счётчиков времени (СчВр).
8 Структурная схема формирования сигналов управления на основе регистров.
9 Опишите программно-аппаратный способ организации счётчиков времени (СчВр).
10 Объясните работу схемы устройства, реализующего программно-аппаратный способ организации СчВр.
Лекция 28 Синхронизация задач. Управление оперативной памятью. Примеры операционных систем реального времени
Синхронизация задач
Хотя каждая задача в системе выполняет отдельную функцию, часто возникает необходимость во временной согласованности (синхронизации) действий, выполняемых различными задачами. Такая синхронизация необходима в следующих случаях:
1) функции, выполняемые различными задачами, связаны друг с другом. Например, если одна задача готовит исходные данные для другой, то последняя не выполняется до тех пор, пока не получит от первой задачи соответствующего сообщения;
2) необходимо упорядочить доступ нескольких задач к разделяемому ресурсу;
3) необходима синхронизация задачи с внешними событиями;
4) необходима синхронизация задачи во времени. Диапазон вариантов очень широк: от привязки момента выдачи какого-либо воздействия к точному астрономическому времени до простой задержки выполнения задачи на определенный интервал времени.
Рассмотрим эти варианты более подробно.
Связанные задачи. В дальнейшем будем называть сообщениями любой механизм явной передачи информации от одной задачи к другой. Объем сообщения может меняться от 1 бита до всей свободной емкости памяти системы.
Связь осуществляется передачей сообщений между задачами. Обмен может быть синхронным и асинхронным. В первом случае доставка сообщений производится после того, как она в плановом порядке получит управление. Обмен сразу инициирует работу планировщика и в действие вступает система приоритетов. Иногда бывает полезным ввести непосредственное управление приоритетами сообщений. Так, например, если после посылки нескольких сообщений на печать система решила отменить ее, сообщение об отмене должно встать в начало очереди и должно быть обработано как наиболее приоритетное.
Во втором - циркуляция сообщений оказывает непосредственное влияние на планирование задач. Так, задача, пославшая сообщение, блокируется, если для продолжения работы ей необходимо дождаться ответа.
Обмен может идти через очередь сообщений или путем передачи сообщений.
Очередь сообщений представляет собой буфер данных; очереди удобны для буферизации данных при обмене между задачами или процедурами обслуживания прерываний. Иногда сообщения передаются через отведенный для этого буфер определенного размера («почтовый ящик»). При этом, как правило, новое сообщение затирает старое, даже если последнее не было обработано.
Наиболее часто используется принцип, когда каждая задача имеет свою очередь сообщений, в конец которой ставится всякое вновь полученное сообщение. Стандартный принцип обработки очереди сообщений по принципу FIFO не всегда оптимально соответствует поставленной задаче. В некоторых ОС РВ предусматривается возможность, когда сообщение от высокоприоритетной задачи обрабатывается в первую очередь (в этом случае говорят, что сообщение наследует приоритет пославшей его задачи).
Сообщение может содержать как сами данные, предназначенные для передачи, так и указатель на такие данные. В этом случае обмен может производиться с помощью разделяемых областей памяти, разделяемых файлов и т. п.
Механизм передачи сообщений обеспечивает возможность обмена данными между двумя задачами путем прямого копирования данных из одной задачи в другую. Сообщение может содержать как сами данные, так и указатели на данные.
Общие ресурсы. Ресурс - это физическое устройство или область памяти, которые могут одновременно использоваться только одной задачей. При работе с общими ресурсами очень важно обеспечить правильную последовательность передачи общего ресурса от задачи к задаче. Для решения этой проблемы есть несколько методов.
1. Использование специального сервера ресурса, ответственного за упорядочивание доступа к нему. В этом случае запрос на изменение значения глобальных данных посылается серверу в виде сообщения, а он устанавливает порядок доступа.
2. Запрет прерывания на время доступа к ресурсу.
3. Использование для упорядочивания доступа к глобальным данным байта блокировки, или семафора.
Семафор - это целочисленная переменная типа счетчика. Поток, перед тем как использовать ресурс, проверяет его состояние и затем вычитает из содержимого счетчика 1. Если значение семафора было равно нулю, поток проходит сквозь семафор успешно и захватывает ресурс. Если значение семафора было меньше нуля, поток останавливается и ставится в очередь.
Закончив работу, нить увеличивает значение семафора на единицу, открывая его. Первая из стоящих в очереди нитей активизируется и вычитает из значения семафора единицу, снова закрывая его. Если же очередь была пуста, семафор остается открытым. Тогда первая нить, подошедшая к семафору, успешно пройдет через него.
В борьбе за общие ресурсы могут происходить проблемы.
1. «Зацикливание» (или «зависание»). Например, задача А захватила ресурс клавиатуры и ждет, когда освободится ресурс дисплея; задача Б, успев захватить ресурс дисплея, ждет, когда освободится клавиатура. Метод решения - освобождение всего, что было захвачено задачей и повторная попытка или использование сервера ресурса.
2. Инверсия приоритетов. Есть три задачи: высокоприоритетная А, среднеприоритетная В и низкоприоритетная С. Пусть задачи А и В в начальный момент времени блокированы в ожидании некоторого внешнего события. Тогда задача С получает семафор и не успевает его отдать, так как прерывается задачей А. Но поскольку семафор занят, задача А будет также блокирована и управление получит задача В. Она будет занимать процессорное время сколь угодно долго.
Синхронизация с внешними событиями. Это выполняется при помощи аппаратурных прерываний. Тенденции здесь следующие.
1. Стремление обеспечить максимально быструю и детерминированную реакцию на внешнее событие.
2. Стремление добиться максимально возможных периодов времени, когда прерывания в системе запрещены.
3. Реализовать минимально возможное количество функций прерывания за минимальное время.
Синхронизация во времени. Для этих целей используются таймеры. Для точной синхронизации с астрономическим временем применяются СЕВ с подстройкой по радиосигналам точного времени.
Примеры операционных систем реального времени
Как уже отмечалось выше, операционные системы реального времени имеют ряд особенностей по сравнению с операционными системами обычных систем.
Ниже приводится краткий обзор некоторых ОС РВ.
Операционная систем UNIX представляет собой многозадачную многопользовательскую операционную систему и является в настоящее время одной из наиболее распространенных в мире. Она состоит из небольшого ядра, управляющего системными ресурсами (процессор, память и ввод/вывод), а остальная часть процедур операционной системы работает как пользовательские процессы. Типичная операционная система содержит 10000-20000 строк на языке С и 1000-2000 строк машинно-ориентированных программ на ассемблере, которые разрабатываются отдельно для каждой аппаратной платформы. Ядро представляет собой единую резидентную программу размером от 100 Кбайт до 1 Мбайт в зависимости от платформы и выполняемых функций.
Процессы в UNIX протекают с разделением времени. Для того чтобы дать возможность всем процессам исполняться, применяется динамическое распределение приоритетов. Процессу, готовому для исполнения, сначала присваивается его номинальный приоритет.
Затем, по мере исполнения, значение этого приоритета уменьшается до тех пор, пока он не становится меньше приоритета следующего из ожидающих процессов, который после этого выбирается для исполнения. В результате процессы с более высоким начальным приоритетом получают большую долю процессорного времени, и все процессы периодически выполняются.
Внешние устройства ввода/вывода рассматриваются в UNIX как файлы. Это упрощает программы, так как можно перенаправить ввод/вывод между файлами или внешними устройствами без изменения кода программы. Это важно и с точки зрения машинной независимости программ.
В последних версиях UNIX поддерживаются такие функциональные элементы систем реального времени, как семафоры, разделяемая память, обмен сигналами между процессами, приоритетное управление задачами и прямой доступ внешних устройств к памяти. Недостаток UNIX - это недружественный пользовательский интерфейс.
В странах СНГ наиболее распространена операционная система QNX, отчасти из-за большой распространенности архитектуры х86 фирмы Intel. QNX - это разработка канадской кампании QNX Software System Ltd. Впервые она появилась на рынке в 1981 году. Система построена по технологии FLEET:
Fault-tolerance (отказоустойчивая);
Load-balancing (регулирующая нагрузку);
Efficient (эффективная);
Extensible (расширяемая);
Transparent (прозрачная).
Система допускает объединение в одну сеть разнородных Intel- совместимых компьютеров, соединенных через Arcnet, Ethernet, Token Ring или через последовательный порт, причем возможно участие одного компьютера в трех сетях одновременно.
Файловая система полностью соответствует стандарту POSIX. QNX обеспечивает работу с различными типами файловых систем: POSIX, Embedded (Flash, ROM, SRAM), CD-ROM (с поддержкой стандарта ISO 9660 и его расширения Rock Ridge), DOS (доступ ко всем носителям информации в формате DOS), NFS (доступ к различным типам удаленных файловых систем), SMB (прозрачный доступ к Windows 95 или NT-серверам).
Операционная система OS-9 относится к классу Unix-подобных ОС. Она имеет модульную структуру, поэтому для исполнения программы в целевой системе требуются лишь некоторые части операционной системы. Весь код, генерируемый в OS-9, не зависит от адреса загрузки, он реентерабельный и может быть записан в ПЗУ. Для связи между процессами можно использовать сигналы, события, каналы и модули данных. Когда сигнал направляется от одного процесса к другому, процесс-адресат исполняет процедуру прерывания. Канал представляет собой последовательный поток данных от одного процесса к другому. Наиболее быстрый обмен данными осуществляется через модули - разделяемые области оперативной памяти, к которой могут обращаться все процессы. Среди других функций режима реального времени система также поддерживает аппаратные прерывания.
Основные характеристики OS-9:
* многозадачная (65535 процессов, 65535 уровней приоритета);
* многопользовательская (255 пользователей);
* переносимость приложений: ANSI С/С++, POSIX 1003.1, TCP/IP (NFS/RPC), X Windows X11.R6 (OSF Motif), JAVA;
* объектно-ориентированный модульный дизайн;
* полностью вытесняемое детерминированное ядро с минимальным временем реакции на прерывание;
* развитые сетевые средства: Arcnet, Ethernet, OMNlnet, X.25, ISDN T1/E1, ATM, NFM, TCP/IP, IPX, Profibus, CAN, MIL STD 1553;
* графические оконные интерфейсы GUI.
Операционная система Windows NT способна обеспечить гарантированное время отклика 5-10 мс. Тем не менее время реакции системы зависит от используемых драйверов, от того, запрещена подкачка страниц или нет, и от множества других факторов. Более того, механизмы обработки прерываний Windows NT имеют определенные особенности, которые мешают использовать эту ОС в приложениях «жесткого» реального времени. Например, пользовательский процесс, независимо от его приоритета, может быть прерван для обработки аппаратного прерывания, даже если последнее пришло от такого источника, как манипулятор типа «мышь». Как правило, подпрограммы обработки аппаратных прерываний делают только самые необходимые действия, после чего основные процедуры обработки ставятся в очередь для последующего выполнения с использованием механизма вызова отложенных процедур (DPC - Deferred Procedure Call). К сожалению, DPC обслуживает очередь по принципу FIFO без учета приоритетов как прерываний, так и процессов, с которыми эти прерывания связаны. Более того, DPC не функционирует до тех пор, пока не будут отработаны все аппаратные прерывания, даже если они приходят от «мыши». В настоящее время ряд продуктов, таких как LA-SPOX, RTX, Falcon, Hyperkernel, приспособлен для реального времени на платформе Windows NT.
RTKernel 4.5 - многозадачное ядро реального времени для работы в среде MS-DOS. При инициализации создаются две задачи: основная и «пустая», которая нужна для нормального функционирования планировщика (ему нужна хотя бы одна задача, находящаяся в состоянии готовности). Планирование происходит согласно правилам:
1. Из всех задач, находящихся в состоянии готовности, в активное состояние переводится задача с наивысшим приоритетом.
2. Если в состоянии готовности пребывают несколько задач, имеющих одинаковый приоритет, в активное состояние переводится задача, не исполнявшаяся в течение наиболее длительного интервала времени.
3. Если несколько задач находятся в ожидании события, порядок их активизации при наступлении события осуществляется в порядке убывания их приоритетов.
Можно упомянуть и такие ОС реального времени как VxWorks, pSOS, LynxOS, VRTX.
Контрольные вопросы:
1 Случаи необходимости синхронизации задач.
2 Как осуществляется связь между задачами?
3 Что из себя представляет очередь сообщений ?
4 Методы решения проблемы обеспечения правильной последовательности передачи общего ресурса от задачи к задаче.
5 Назначение семафора.
6 Проблемы, которые могут происходить в борьбе за общие ресурсы.
7 Тенденции синхронизации с внешними событиями.
8 Как осуществляется управление оперативной памятью в СРВ?
9 Охарактеризуйте ОС UNIX.
10 Охарактеризуйте ОС QNX.
11 Охарактеризуйте OS-9
Лекция 29 Типовая структура алгоритмов управляющих ЭВМ. Программирование алгоритмов реального времени
Модуль 1 Специализированные технические средства и системы автоматизации
Тема 1 Основные понятия и классификация систем управления
Основные понятия
Под системой принято понимать совокупность связанных между собой элементов. Система характеризуется структурой S = <E, C, λ>, где Е - множество элементов, С - множество связей между элементами, λ - соответствие между элементами.
При этом элементом называется часть системы, не подлежащая дальнейшему делению на части при данном уровне рассмотрения. Элементы могут представлять собой понятия, и тогда мы будем иметь дело с понятийной системой; если элементами системы являются физические объекты, то налицо техническая система. Заметим, что в определении отмечается некоторая совокупность, т.е. некоторая целостность. Нас интересуют не отдельные элементы, а все вместе, взятые в некотором единстве. Принципиальным является необходимость учета взаимодействия элементов, так как именно оно придает совокупности элементов новое качество.
Часть элементов системы, выделенная на основе какой-либо общности элементов, называется подсистемой.
Системы, создаваемые человеком, обладают целью функционирования. Именно наличие цели служит тем объединяющим фактором, на основе которого объединяются элементы. Такие системы называют организованными системами.
Лекция 1 Управление как процесс принятия и реализации решения. Классификация систем управления. Структура систем реального времени
1.1 Управление как процесс принятия и реализации решения
В повседневной деятельности мы часто сталкиваемся с терминами «управлять», «регулировать» и понимаем под этими терминами задачу воздействия на параметры объекта для достижения определенных целей. Естественно называть управлением целенаправленное изменение параметров объекта управления.
Совокупность наиболее важных параметров, от которых зависит функционирование объекта управления, описывает его состояние. Знание состояния объекта управления - важнейший фактор, определяющий принятие решения по управлению. Другой важный фактор - возмущения, которым подвергается объект управления со стороны других объектов, состоянием которых мы не можем управлять. Множество таких объектов объединяется понятием «внешняя среда». На основе оценок состояния объекта управления и внешней среды принимается решение по управлению. Конечно, при этом учитывается цель функционирования и ресурсы, которыми мы располагаем. После того, как решение приято, оно реализуется с потреблением ресурсов. Так мы приходим к структурной схеме процесса управления, показанной на рис. 1.1.
Рисунок 1.1 Структурная схема процесса управления
Управление осуществляется путем выдачи на объект управляющих воздействий: Х(t) = (x1, x2, ..., xn; t).
Кроме них, объект управления подвергается воздействию возмущений со стороны внешней среды; часть из них: Z(t) = (z1, z2, ..., zm; t) измеряется,
другая часть: F(t) = (f1, f2, ..., fs; t) неизвестна (часто неизвестно также значение s).
Контролируемые параметры, по которым ведется управление, Y(t) = (y1, y2, ..., yr; t), называются управляемыми. Управляемые параметры дают обобщенную информацию о состоянии объекта управления
S(t) = (s1, s2, ..., sk; t).
Смена состояний объекта управления определяет процесс его функционирования:
S(t) = φ[X(t), Z(t), F(t), Y(t), S(t-1)].
Задача управления состоит в том, чтобы найти такую функцию X(t), которая обеспечила бы перевод объекта в заданное конечное состояние S*, соответствующее цели его функционирования. Этот перевод должен закончиться за конечное число шагов и требовать минимальных затрат ресурсов R.
Дата: 2019-04-23, просмотров: 391.