Важное практическое значение для оценки асинхронных электродвигателей имеют их пусковые свойства. Эти свойства в основном определяются следующими величинами: пусковым током Iпуск и начальным пусковым моментом Мпуск, плавностью и экономичностью пускового процесса, длительностью пуска. В каталогах обычно указывается кратность пускового значения величины к ее номинальному значению (Iпуск/ Iном и Мпуск/Мном).
Пусковые свойства асинхронного двигателя определяются особенностями его конструкции, в частности устройством ротора.
 Пуск асинхронных двигателей с фазным ротором. Пусковые условия асинхронного двигателя с фазной обмоткой ротора (рис. 14.24, а — схема замещения; б — условное обозначение) можно существенно улучшить ценой некоторого усложнения конструкции и обслуживания двигателя.
Пуск асинхронных двигателей с фазным ротором. Пусковые условия асинхронного двигателя с фазной обмоткой ротора (рис. 14.24, а — схема замещения; б — условное обозначение) можно существенно улучшить ценой некоторого усложнения конструкции и обслуживания двигателя.
Если в уравнении вращающегося момента  положить s = 1, то получим выражение начального пускового момента, т. е. момента, развиваемого двигателем при трогании с места:
положить s = 1, то получим выражение начального пускового момента, т. е. момента, развиваемого двигателем при трогании с места:

Если нужно, чтобы  , т. е. чтобы при пуске двигатель развивал максимальный момент, то согласно
, т. е. чтобы при пуске двигатель развивал максимальный момент, то согласно  активное сопротивление фазной обмотки ротора должно быть:
активное сопротивление фазной обмотки ротора должно быть:  или
или  . Так как активное сопротивление фазной обмотки ротора относительно мало, то для получения максимального начального пускового момента необходимо в цель ротора включить пусковой реостат с сопротивлением фазы
. Так как активное сопротивление фазной обмотки ротора относительно мало, то для получения максимального начального пускового момента необходимо в цель ротора включить пусковой реостат с сопротивлением фазы 
В этом случае зависимость М ( s) асинхронного двигателя будет иметь максимум при s = 1 (рис. 14.25).
Как только ротор начинает вращаться, уменьшается скольжение, а вместе с ним ЭДС и ток ротора, вследствие чего уменьшается вращающий момент. Чтобы двигатель продолжал развивать вращающий момент, близкий к максимальному, сопротивление пускового реостата нужно постепенно уменьшать. Наконец, когда двигатель достигает номинальной частоты вращения, пусковой реостат замыкают накоротко.
Для уменьшения механических потерь и износа колец и щеток двигатели снабжаются иногда приспособлением для подъема щеток и замыкания колец накоротко.
Включение добавочного резистора в цепь ротора изменяет характер зависимости вращающего момента М от скольжения s. При этом согласно  не изменяется максимальный момент двигателя, увеличение
не изменяется максимальный момент двигателя, увеличение  только смещает его в сторону большего скольжения. Все графики зависимостей М (s) имеют поэтому вершину характеристики на одинаковой высоте (рис. 14.25). Выключение ступеней пускового реостата заставляет двигатель изменять режим работы, переходя с одной характеристики на другую.
только смещает его в сторону большего скольжения. Все графики зависимостей М (s) имеют поэтому вершину характеристики на одинаковой высоте (рис. 14.25). Выключение ступеней пускового реостата заставляет двигатель изменять режим работы, переходя с одной характеристики на другую.
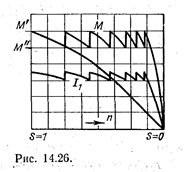 Секции реостата обычно выводят на контакты, благодаря чему при пуске момент двигателя и ток изменяются по ступенчатой кривой (рис. 14.26), число ступеней которой определяется числом контактов пускового реостата. При этом пусковой момент изменяется в пределах от
Секции реостата обычно выводят на контакты, благодаря чему при пуске момент двигателя и ток изменяются по ступенчатой кривой (рис. 14.26), число ступеней которой определяется числом контактов пускового реостата. При этом пусковой момент изменяется в пределах от  до
до  .
.
Чем больше должен быть пусковой момент, чем ближе он к максимальному моменту, тем больше будет и пусковой ток. По этой причине лишь для особо тяжелых условий пуска реостат подбирается так, чтобы пусковой момент был равен максимальному.
Чтобы пусковой реостат в течение времени пуска не перегревался, его мощность должна примерно равняться мощности двигателя. Для двигателей большой мощности пусковые реостаты выполняются с масляным охлаждением. В других случаях иногда применяются очень дешевые и простые водяные реостаты.
Конечно, применение пускового реостата значительно улучшает пусковые условия асинхронного двигателя, повышая пусковой момент и уменьшая пусковой ток. Но, с другой стороны, применение ротора с фазной обмоткой удорожает двигатель, усложняет его обслуживание и, наконец, несколько ухудшает cosφ и КПД двигателя. У двигателей большой мощности эта разница в КПД и cosφ незначительна и недостатками фазного ротора остаются удорожание машины, длительность и сложность управления ступенями пускового реостата.
Пуск асинхронного двигателя с короткозамкнутым ротором. В большинстве случаев применяется прямой пуск двигателей с короткозамкнутым ротором. Такой пуск исключительно прост и быстр. Необходим лишь простейший коммутирующий аппарат, например рубильник, или для двигателя высокого напряжения — масляный выключатель. При прямом пуске двигателя кратность пускового тока высока, примерно 5,5—7 (для двигателей мощностью 0,6—100 кВт при синхронной частоте вращения, т. е. при 750—3000 об/мин). Такой кратковременный пусковой ток относительно безопасен для двигателя, но вызывает изменение напряжения в сети, что может неблагоприятно сказаться на других потребителях, энергии, присоединенных к той же распределительной сети. По этим причинам номинальная мощность асинхронных двигателей, пускаемых прямым .включением, зависит от мощности распределительной сети. В мощных сетях промышленных предприятий возможен прямой пуск двигателей с короткозамкнутым ротором мощностью до 1000 кВт и даже выше, но во многих случаях эта мощность не должна превышать 100 кВт.
 Следует иметь в виду еще один недостаток пускового режима асинхронного двигателя. У двигателей с короткозамкнутой обмоткой ротора кратность пускового момента лежит в пределах 1—2 (рис. 14.22). Таким образом, при большом токе двигатель развивает относительно небольшой вращающий момент.
Следует иметь в виду еще один недостаток пускового режима асинхронного двигателя. У двигателей с короткозамкнутой обмоткой ротора кратность пускового момента лежит в пределах 1—2 (рис. 14.22). Таким образом, при большом токе двигатель развивает относительно небольшой вращающий момент.
Улучшение пускового режима асинхронного двигателя сводится к уменьшению пускового тока, когда это необходимо, причем желательно, чтобы пусковой момент был возможно больше.
Для уменьшения пускового тока можно на время понизить напряжение между выводами фазных обмоток статора, включив для этого последовательно с обмоткой статора трехфазную катушку индуктивности. Уменьшение пускового тока, создаваемое понижением напряжения на статоре, вызывает уменьшение пускового момента, пропорционального квадрату напряжения на статоре (  ). Например, при таком пуске уменьшение пускового тока в 2 раза будет сопровождаться уменьшением пускового момента в 4 раза. Во многих случаях при пуске двигателя под нагрузкой такое понижение момента недопустимо — двигатель не сможет преодолеть тормозной механический момент на валу.
). Например, при таком пуске уменьшение пускового тока в 2 раза будет сопровождаться уменьшением пускового момента в 4 раза. Во многих случаях при пуске двигателя под нагрузкой такое понижение момента недопустимо — двигатель не сможет преодолеть тормозной механический момент на валу.
Понижение напряжения на статоре на время пуска можно осуществить также посредством переключения на время пуска обмотки статора, нормально работающей при соединении по схеме треугольник, на соединение по схеме звезда. Такое переключение применяется только для пуска в ход короткозамкнутых двигателей относительно малой мощности, примерно до 20 кВт.
Пусковые характеристики асинхронного двигателя с короткозамкнутым ротором могут быть существенно улучшены, если обмотка ротора имеет двойную беличью клетку. Такой ротор снабжен двумя клетками, лежащими одна над другой: наружной — пусковой и внутренней — рабочей. Материалом стержней наружной клетки служит обыкновенно марганцовистая латунь, т. е. материал с повышенным по сравнению с медью удельным сопротивлением. Материалом стержней внутренней клетки служит медь. Кроме того, стержни внутренней клетки имеют обычно большую площадь поперечного сечения. Таким образом, активное сопротивление наружной клетки значительно больше активного сопротивления внутренней (в 4—5 раз). Обе клетки снабжены с торцевых сторон замыкающими кольцами.
 Стержни клеток размещены соответственно в наружной и внутренней частях паза. Такое расположение клеток приводит к большому различию значений их индуктивности рассеяния. Последняя у внутренней клетки велика, так как стержни этой клетки окружены сталью, прорезанной лишь сверху узкой щелью паза (рис. 14.27, а и b). У наружной клетки индуктивность рассеяния значительно меньше, так как значительная часть пути линий поля рассеяния вокруг ее стержней проходит в воздушном промежутке между ротором и статором с большим магнитным сопротивлением, а также по щели паза под стержнями.
Стержни клеток размещены соответственно в наружной и внутренней частях паза. Такое расположение клеток приводит к большому различию значений их индуктивности рассеяния. Последняя у внутренней клетки велика, так как стержни этой клетки окружены сталью, прорезанной лишь сверху узкой щелью паза (рис. 14.27, а и b). У наружной клетки индуктивность рассеяния значительно меньше, так как значительная часть пути линий поля рассеяния вокруг ее стержней проходит в воздушном промежутке между ротором и статором с большим магнитным сопротивлением, а также по щели паза под стержнями.
В первый момент пуска двигателя (пока s = 1) частота токов в обмотке ротора равна частоте сети; в этих условиях полное сопротивление внутренней клетки обусловливается главным образом ее большим индуктивным сопротивлением рассеяния. Таким образом, при пуске двигателя в роторе имеет место явление вытеснения тока из внутренней беличьей клетки. В то же время полное сопротивление наружной клетки определяется преимущественно ее активным сопротивлением. Ток наружной клетки при пуске мало сдвинут по фазе по отношению к индуктированной в ней ЭДС; он создает большой пусковой момент, как это имеет место и у двигателя с фазным ротором при включении пускового реостата. Отношение токов наружной и внутренней клеток зависит от отношения полных сопротивлений этих клеток; обычно при. пуске ток внутренней клетки значительно меньше тока наружной.
По мере разбега ротора частота токов в нем уменьшается и вместе с тем уменьшается влияние индуктивного сопротивления на распределение токов. При номинальной скорости частота токов ротора имеет значение порядка 1 Гц; в этих условиях индуктивные сопротивления рассеяния весьма малы и распределение токов между клетками ротора определяется отношением активных сопротивлений клеток. Поэтому ток наружной клетки будет меньше тока внутренней клетки, активное и полное сопротивления которой в таких условиях малы, как у обычного двигателя с короткозамкнутым ротором.
Можно рассматривать зависимость М =F (s) двигателя с двойной беличьей клеткой как сумму характеристик двигателя с относительно большим активным сопротивлением обмотки ротора (рис. 14.27, кривая 1) и двигателя с относительно малым активным сопротивлением обмотки ротора (кривая 2).
Таким образом, у двигателей с двойной беличьей клеткой активное сопротивление обмотки ротора в целом изменяется в зависимости от изменения скольжения — оно велико при пуске и мало при рабочем скольжении. Благодаря этому двигатель, снабженный ротором с двойной беличьей клеткой, по сравнению с обычным двигателем, имеющим короткозамкнутый ротор, развивает повышенный пусковой вращающий момент при пониженном пусковом токе.
В некоторых конструкциях обе клетки изготовляются путем непосредственной заливки расплавленным алюминием пазов ротора c и d (рис. 14.27); при этом алюминий заполняет и щель между пазами верхней и нижней клеток, благодаря чему стержни проводников обеих Клеток образуют один цельный стержень фасонного сечения. Упрощенным вариантом асинхронного двигателя с двойной беличьей клеткой является двигатель с глубоким пазом.
 Обмотка ротора этого двигателя изготовляется из прямоугольных стержней малой ширины и большой высоты, которые помещаются в соответствующие глубокие пазы в сердечнике ротора. Переменный ток распределяется по сечению проводника в общем случае неравномерно; это явление использовано в данном двигателе. На рис. 14.28 показаны линии поля рассеяния, замыкающиеся поперек глубокого паза, в котором расположен стержень обмотки с током. Часть стержня, лежащая в глубине паза, сцеплена с большим числом линий, чем наружная часть того же стержня. Вследствие этого при пуске асинхронного двигателя в ход повышенное индуктивное сопротивление этой части стержня вызывает вытеснение тока ротора в наружную часть сечения стержня. Это эквивалентно увеличению активного сопротивления обмотки ротора. Благодаря увеличению активного сопротивления повышается начальный момент двигателя, а увеличение индуктивного сопротивления вследствие применения глубокого паза уменьшает пусковой ток. При рабочей частоте вращения двигателя индуктивное сопротивление становится незначительным, ток распределяется по сечению стержня почти равномерно и двигатель работает, как обычный короткозамкнутый.
Обмотка ротора этого двигателя изготовляется из прямоугольных стержней малой ширины и большой высоты, которые помещаются в соответствующие глубокие пазы в сердечнике ротора. Переменный ток распределяется по сечению проводника в общем случае неравномерно; это явление использовано в данном двигателе. На рис. 14.28 показаны линии поля рассеяния, замыкающиеся поперек глубокого паза, в котором расположен стержень обмотки с током. Часть стержня, лежащая в глубине паза, сцеплена с большим числом линий, чем наружная часть того же стержня. Вследствие этого при пуске асинхронного двигателя в ход повышенное индуктивное сопротивление этой части стержня вызывает вытеснение тока ротора в наружную часть сечения стержня. Это эквивалентно увеличению активного сопротивления обмотки ротора. Благодаря увеличению активного сопротивления повышается начальный момент двигателя, а увеличение индуктивного сопротивления вследствие применения глубокого паза уменьшает пусковой ток. При рабочей частоте вращения двигателя индуктивное сопротивление становится незначительным, ток распределяется по сечению стержня почти равномерно и двигатель работает, как обычный короткозамкнутый.
Двигатель с глубоким пазом ротора в конструктивном отношении проще двигателя с двойной клеткой. Зато второй может быть выполнен на различные начальные моменты и на различные кратности пускового тока, что дает возможность приспосабливать этот двигатель для специальных случаев тяжелого пуска в ход. Тем не менее широко применяются двигатели с глубоким пазом.
Б) Рабочие характеристики
Механическая характеристика наглядно показывает свойства асинхронного двигателя как части электропривода. Но для более полного выявления свойств самого двигателя служат его рабочие характеристики— так принято называть зависимости от полезной мощности Р2 двигателя на валу частоты вращения п, вращающего момента М, коэффициента мощности cosφ и КПД η =  . Все рабочие характеристики снимаются при номинальных частоте сети f и напряжении между выводами статора U1 = U1ном.
. Все рабочие характеристики снимаются при номинальных частоте сети f и напряжении между выводами статора U1 = U1ном.
 Так как
Так как  , а
, а  то зависимость n(Р2) — скоростная характеристика — мало отличается по форме от механической характеристики двигателя п (М), она тоже может быть названа жесткой (рис. 14.29). Вращающий момент М, развиваемый двигателем, складывается из полезного момента M2 (преодоления нагрузки на валу двигателя) и момента холостого хода Мх. Последний затрачивается на покрытие механических потерь двигателя. Этот момент можно приближенно считать не зависящим от нагрузки двигателя. Полезный момент
то зависимость n(Р2) — скоростная характеристика — мало отличается по форме от механической характеристики двигателя п (М), она тоже может быть названа жесткой (рис. 14.29). Вращающий момент М, развиваемый двигателем, складывается из полезного момента M2 (преодоления нагрузки на валу двигателя) и момента холостого хода Мх. Последний затрачивается на покрытие механических потерь двигателя. Этот момент можно приближенно считать не зависящим от нагрузки двигателя. Полезный момент  и если бы
и если бы  была строго постоянна, то зависимость
была строго постоянна, то зависимость  была бы линейна, но угловая скорость двигателя немного уменьшается с увеличением Р2, поэтому график зависимости М2 (Р2) немного отклоняется вверх. Соответственно график вращающего момента М (Р2), складывающегося из момента холостого хода и полезного момента, пересекает ось ординат в точке, соответствующей Мх, а затем он почти прямолинеен и лишь немного изгибается вверх.
была бы линейна, но угловая скорость двигателя немного уменьшается с увеличением Р2, поэтому график зависимости М2 (Р2) немного отклоняется вверх. Соответственно график вращающего момента М (Р2), складывающегося из момента холостого хода и полезного момента, пересекает ось ординат в точке, соответствующей Мх, а затем он почти прямолинеен и лишь немного изгибается вверх.
Что касается зависимости  двигателя от нагрузки, то его изменения обусловлены следующими соотношениями. Намагничивающий ток двигателя мало зависит от нагрузки, так как ее увеличение вызывает лишь возрастание потокосцеплений рассеяния, пропорциональных токам в обмотках статора и ротора, а главный магнитный поток машины при возрастании нагрузки незначительно уменьшается. Но активный ток двигателя пропорционален его механической нагрузке. Таким образом, с увеличением нагрузки двигателя относительное значение реактивного тока быстро убывает, a увеличивается. При холостом ходе двигателя его коэффициент мощности довольно низок — примерно 0,2. С увеличением нагрузки он быстро возрастает и достигает максимального значения (0,7—0,9) при нагрузке, близкой к номинальной. Таким образом, даже у полностью загруженного двигателя реактивный ток составляет 70—40 % тока статора.
двигателя от нагрузки, то его изменения обусловлены следующими соотношениями. Намагничивающий ток двигателя мало зависит от нагрузки, так как ее увеличение вызывает лишь возрастание потокосцеплений рассеяния, пропорциональных токам в обмотках статора и ротора, а главный магнитный поток машины при возрастании нагрузки незначительно уменьшается. Но активный ток двигателя пропорционален его механической нагрузке. Таким образом, с увеличением нагрузки двигателя относительное значение реактивного тока быстро убывает, a увеличивается. При холостом ходе двигателя его коэффициент мощности довольно низок — примерно 0,2. С увеличением нагрузки он быстро возрастает и достигает максимального значения (0,7—0,9) при нагрузке, близкой к номинальной. Таким образом, даже у полностью загруженного двигателя реактивный ток составляет 70—40 % тока статора.
Неполная загруженность асинхронных двигателей является одной из главных причин низкого cos <p промышленных предприятий. Естественным способом повышения cosφ является полная загрузка асинхронных двигателей. Главный магнитный поток двигателя пропорционален напряжению на статоре. Намагничивающий ток, возбуждающий этот поток, при заданном значении потока обратно пропорционален магнитному сопротивлению на пути потока. В этом магнитном сопротивлении большую часть составляет сопротивление воздушного зазора между статором и ротором. По этой причине конструктор стремится сократить этот зазор до минимума, определяемого условиями подвижности в подшипниках и необходимым запасом на их износ, прогибом вала и точностью центровки. С увеличением номинальной мощности двигателя необходимый воздушный зазор возрастает значительно медленнее этой мощности, благодаря чему с повышением номинальной мощности двигателя его cos q> увеличивается. С уменьшением номинальной частоты вращения двигателя увеличивается его магнитный поток, так как при меньшей частоте вращения он индуктирует в фазной обмотке статора меньшую ЭДС. Следовательно, у тихоходных двигателей намагничивающий ток относительно больше, a cosφ существенно меньше.
Коэффициент полезного действия определяется отношением полезной мощности на валу Р2 к мощности Р1 определяющей потребление двигателем энергии из сети: 
Мощность Р1 равна сумме полезной мощности и мощности всех потерь в двигателе: 
Мощность всех потерь энергии в двигателе можно разделить на постоянную составляющую, практически не зависящую от нагрузки, и переменную составляющую, зависящую от нее.
Мощностью постоянных потерь энергии в двигателе можно считать мощность потерь в сердечнике статора на гистерезис и вихревые токи и мощность механических потерь, которая определяется экспериментально из опыта холостого хода двигателя.
Мощностью переменных потерь энергии в двигателе является мощность потерь на нагревание проводников обмоток статора и ротора, она равна: 

Своего максимального значения (65—95 %) КПД достигает, когда переменные потери равны постоянным. У большинства двигателей этот максимум КПД имеет место примерно при нагрузке, равной 75 % номинальной, так как двигатели проектируются с учетом того обстоятельства, что далеко не всегда они полностью загружены.
Дата: 2019-05-29, просмотров: 358.