Кыргызско – Российский Славянский Университет
Естественно-Технический Факультет
Кафедра Математики
Реферат
по предмету: “Теория Игр”
На тему
“Принятие оптимальных решений в условиях неопределенности “
Выполнил: Алексеенко Н.С.
Проверил: :Жданов Н.В.
Бишкек-2001
1.1. Постановка задачи
Как правило, большинство реальных инженерных задач содержит в том или ином виде неопределенность. Можно даже утверждать, что решение задач с учетом разного вида неопределенностей является общим случаем, а принятие решений без их учета - частным. Однако, из-за концептуальных и методических трудностей в настоящее время не существует единого методологического подхода к решению таких задач. Тем не менее, накоплено достаточно большое число методов формализации постановки и принятия решений с учетом неопределенностей. При использовании этих методов следует иметь в виду, что все они носят рекомендательный характер и выбор окончательного решения всегда остается за человеком (ЛПР).
Как уже указывалось, при решении конкретных задач с учетом неопределенностей инженер сталкивается с разными их типами. В исследовании операций принято различать три типа неопределенностей:
· неопределенность целей;
· неопределенность наших знаний об окружающей обстановке и действующих в данном явлении факторах (неопределенность природы);
· неопределенность действий активного или пассивного партнера или противника.
В приведенной выше классификации тип неопределенностей рассматривается с позиций того или иного элемента математической модели. Так, например, неопределенность целей отражается при постановке задачи на выборе либо отдельных критериев, либо всего вектора полезного эффекта.
С другой стороны, два другие типа неопределенностей влияют, в основном, на составление целевой функции уравнений ограничений и метода принятия решения. Конечно, приведенное выше утверждение является достаточно условным, как, впрочем, и любая классификация. Мы приводим его лишь с целью выделить еще некоторые особенности неопределенностей, которые надо иметь в виду в процессе принятия решений.
Дело в том, что кроме рассмотренной выше классификации неопределенностей надо учитывать их тип (или "род") с точки зрения отношения к случайности.
По этому признаку можно различать стохастическую (вероятностную) неопределенность, когда неизвестные факторы статистически устойчивы и поэтому представляют собой обычные объекты теории вероятностей - случайные величины (или случайные функции, события и т.д.). При этом должны быть известны или определены при постановке задачи все необходимые статистический характеристики (законы распределения и их параметры).
Примером таких задач могут быть, в частности, система технического обслуживания и ремонта любого вида техники, система организации рубок ухода и т.д.
Другим крайним случаем может быть неопределенность нестохастического вида (по выражению Е.С.Вентцель- "дурная неопределенность"), при которой никаких предположений о стохастической устойчивости не существует. Наконец, можно говорить о промежуточном типе неопределенности, когда решение принимается на основании каких-либо гипотез о законах распределения случайных величин. При этом ЛПР должен иметь в виду опасность несовпадения его результатов с реальными условиями. Эта опасность несовпадения формализуется с помощью коэффициентов риска.
Рассмотрим примеры и методы принятия решений с учетом указанных выше типов неопределенностей.
Пример 1.1. Лесопосадки
Допустим, что ставится задача наиболее эффективного выращивания саженцев при лесопосадках путем внесения в почву определенного количества удобрений (или создания наиболее эффективной системы гидромелиорации). При этом, как правило, используются стратегии, максимизирующие доход (например, прирост древесины), или минимизирующие расход (стоимость удобрений или затрат на мелиорацию). При этом, очевидно, что обе цели противоречат друг другу и с точки зрения строго научной постановки задача не имеет решения, ибо минимум затрат - нуль, а с нулевыми затратами добиться какого-либо эффекта теоретически невозможно.
Пример 1.2. Проектирование лесных машин
Другим очень распространенным примером является создание любой машины. В частности, при создании лесной машины ставятся задачи получения максимальной производительности, минимального влияния на окружающую среду, высокой надежности и минимальной себестоимости. Противоречивость целей здесь налицо и реальная конструкция всегда будет каким-то компромиссом, достигаемым путем определенных уступок по каким-либо качествам. Собственно, в получении таких компромиссных решений и заключается основная проблема.
Таким образом, неопределенность целей требует привлечения каких-либо гипотез, помогающих получению однозначных решений. В данном случае учет фактора неопределенности цели , как уже указывалось, приводит к необходимости рассмотрения другой проблемы, которая формулируется в виде проблемы принятия оптимальных многоцелевых решений, которая подробно рассматривается авторами в главе 7. В этой же главе мы рассмотрим указанные выше другие типы неопределенностей.
Пример 1.1.
Пусть мастерская имеет n станков, причем ремонт отказавшего станка производится индивидуально, а если станки не отказывают, то через T интервалов времени производится профилактический ремонт всех станков. Задача заключается в определении оптимального значения T, при котором общие затраты на ремонт будут минимальны. Очевидно, что задача может быть решена, если известна вероятность pt отказа одного станка в момент времени t. Эта неопределенность и представляет в данном случае элемент "риска".
КОЗ для данного случая запишется так:
E[C(T)] = (C1  E(nt) + C2 n)/T, (1.3)
E(nt) + C2 n)/T, (1.3)
где
E[C(T)] - КОЗ затрат на ремонт станков за один интервал времени;
C1 - затраты на ремонт одного станка при внезапном отказе;
E(nt) - математическое ожидание вышедших из строя станков в момент t;
C2 - затраты на профилактический (плановый) ремонт одного станка.
Допустим, что nt имеет биноминальное распределение, тогда
E(nt) = n pt и
E[C(T)] =[n (C1 pt + C2)]/T. (1.3а)
Необходимые условия оптимального значения T* имеют вид:
E[C(T*-1)] E[C(T*)] и E[C(T*+1)] E[C(T*)]. (1.4)
2. Критерий "ожидаемого значения - дисперсия".
Как указывалось выше, КОЗ имеет область применения, ограниченную значительным числом однотипных решений, принимаемых в аналогичных ситуациях. Этот недостаток можно устранить, если применять комбинацию КОЗ и выборочной дисперсии s2. Возможным критерием при этом является минимум выражения
E(Z, ) = E(Z) k U(z), (1.5)
где
E(Z, ) - критерий "ожидаемого значения - дисперсия";
k - постоянный коэффициент;
U(Z) = mZ/S - выборочный коэффициент вариации;
mZ - оценка математического ожидания;
S - оценка среднего квадратического ожидания.
Знак "минус" ставится в случае оценки прибыли, знак "плюс" - в случае затрат.
Из зависимости (1.5) видно, что в данном случае точность предсказания результата повышается за счет учета возможного разброса значений E(Z), то есть введения своеобразной "страховки". При этом степень учета этой страховки регулируется коэффициентом k, который как бы управляет степенью учета возможных отклонений. Так, например, если для ЛПР имеет большое значение ожидаемые потери прибыли, то k>>1 и при этом существенно увеличивается роль отклонений от ожидаемого значения прибыли E(Z) за счет дисперсии.
Пример 1.3. Обоснование состава ремонтной бригады.
На предприятии решается вопрос о создании ремонтной бригады. Основываясь на применениии критериев Вальда, Лапласа, Сэвиджа и Гурвица, определить наиболее целесообразное число членов бригады. Исходные данные сведены в табл. 1.1, в ячейках которой занесены доходы при разных вариантах (стратегиях). Под стратегией понимается x -число членов бригады и R - количество станков, требующих ремонта.
Таблица 1.1
| x\R | 40 | 30 | 20 | 10 |
| 5 | 50 | 100 | 180 | 250 |
| 4 | 80 | 70 | 80 | 230 |
| 3 | 210 | 180 | 120 | 210 |
| 2 | 300 | 220 | 190 | 150 |
1. Критерий Вальда. Как указывалось выше критерий Вальда выражается в двухь формах, зависящих от вида исходных данных.
· Если исходными данными являются потери при различных стратегиях, то критерий выбирается в форме минимакса (минимальные потери из минимально возможных), то есть критерий (2.6) имеет вид
 .
.
Таким образом, справа дописывается столбец максимумов по строкам.
Таблица 1.3
| x\R | 40 | 30 | 20 | 10 | max |
| 5 | 50 | 100 | 180 | 250 | 250 |
| 4 | 80 | 70 | 80 | 230 | 230 |
| 3 | 210 | 180 | 120 | 210 | 210 |
| 2 | 300 | 220 | 190 | 150 | 300 |
Для удобства запишем его в виде транспонированного вектора max uxR = <250, 230, 210, 300>т и выбираем минимальное значение 210. Таким образом, при данных условиях рациональным решением будет x=3, R=10, min uxR = 210.
· Если в таблице фигурируют доходы при различных стратегиях, то критерий Вальда принимает форму максимина (максимум из минимумов), то есть критерий (2.6) имеет вид
 .
.
Таким образом, справа дописывается столбец минимумов по строкам.
Таблица 1.3
| x\R | 40 | 30 | 20 | 10 | Min |
| 5 | 50 | 100 | 180 | 250 | 50 |
| 4 | 80 | 70 | 80 | 230 | 70 |
| 3 | 210 | 180 | 120 | 210 | 120 |
| 2 | 300 | 220 | 190 | 150 | 150 |
Тогда решающий столбец имеет вид max uxR = <50, 70, 120, 150>т. Максиминное значение равно 150. Таким образом, при данных условиях рациональным решением будет: x=2, R=10, max uxR = 150.
2. Критерий Лапласа. Как известно, критерий Лапласа предполагает, что все состояния системы равновероятны и рациональные решения выбираются по критерию:
 .
.
При данных предыдущего примера в случае, если в таблице записаны потери при том или ином варианте, значение критериев подсчитывается так:
W1 = 0.25 (50+100+180+250) = 145;
W2 = 0.25 (80+70+80+230) = 115;
W3 = 0.25 (210+180+120+210) = 180;
W4 = 0.25 (300+220+190+150) = 215.
Таким образом наилучшим решением будет x=4, минимум потерь (наибольший выигрыш) равен 115.
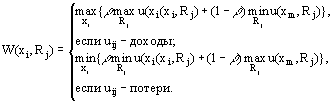
3. Критерий Сэвиджа. В этом случае составляется новая матрица, элементы которой составляются по правилу:

Составим матрицу W(xi, Rj) - матрицу сожалений для случая, когда uij - потери, используя предыдущие данные. Соответствующая матрица получается путем вычисления значений min(xi, Rj), равных 50, 70, 80 и 150 из столбцов 1, 2, 3, 4, соответственно
| max W(xi, Rj) | |||||
| 0 | 30 | 100 | 100 | 100 | |
| W(xi, Rj)= | 30 | 0 | 0 | 0 | 80 |
| 160 | 110 | 40 | 60 | 160 | |
| 250 | 150 | 110 | 0 | 250 |
Таким образом, минимальные потери будут при x=2, когда max W(xi, Rj)=80. Отметим, что независимо от того, является функцией сожаления, определяющая потери. Поэтому здесь можно применить только минимаксный критерий.
4. Критерий Гурвица. В отличие от примененных выше "жестких" критериев, критерий Гурвица является "гибким", так как позволяет варьировать "степень оптимизма-пессимизма". Таким образом, этот критерий устанавливает баланс между случаями крайнего оптимизма или пессимизма, путем введения коэффициента веса . Как указывалось выше, критерий записывается в виде:
Применим данный критерий к нашим исходным данным, полагая =.5. Матрица значений W будет выглядеть следующим образом:
Таблица 1.4
| min u(xi, Rj) | max u(xi, Rj) | min u(xi, Rj) + max u(xi, Rj) | |
| 5 | 50 | 250 | 15 |
| 4 | 70 | 230 | 15 |
| 3 | 120 | 210 | 165 |
| 2 | 150 | 300 | 225 |
Таким образом, в результате применения этого критерия получилось, что существуют два равнозначных варианта:
x1 = 5, x2 = 4 при одинаковых значениях W1 = W2 = 15.
Учет активных условий
Как правило, решение практических задач, связанных с оценкой качества и надежности изделий лесного машиностроения, зависит не только от оперирующей стороны (допустим, конструктора), но и от действий других субъектов системы (например, технолога-лесозаготовителя). Каждая из сторон преследует собственные цели, не всегда совпадающие друг с другом. Неопределенность такого рода при принятии решений относят к классу поведенческих неопределенностей. Теоретической основой нахождения оптимального решения в условиях неопределенности и конфликтных ситуаций является теория игр. Игра - это математическая модель процесса функционирования конфликтующих элементов систем, в котором действия игроков происходят по определенным правилам, называемых стратегиями. Ее широкому распространению в последнее время способствовало как развитие ЭВМ, так и создание аналитического аппарата, позволяющего находить аналитические решения для широкого класса задач. Основной постулат теории игр - любой субъект системы по меньшей мере так же разумен, как и оперирующая сторона и делает все возможное, чтобы достигнуть своих целей. От реального конфликта игра (математическая модель конфликта) отличается тем, что она ведется по определенным правилам, которые устанавливают порядок и очередность действий субъектов системы, их информированность, порядок обмена информацией, формирование результата игры.
Существует много классов игр, различающихся по количеству игроков, числу ходов, характеру функций выигрыша и т.д. Выделим следующие основные классы игр:
· антагонистические (игры со строгим соперничеством) и неантогонистические. В первом случае цели игроков противоположны, во - втором - могут совпадать;
· стратегические и нестратегические (в первых субъект системы действует независимо от остальных, преследуя свои цели, во-вторых субъекты выбирают единую для всех стратегию);
· парные игры и игры для N-лиц;
· коалиционные и бескоалиционные;
· кооперативные и некооперативные (в первых возможен обмен информацией о возможных стратегиях игроков);
· конечные и бесконечные (в первых - конечное число стратегий).
Наибольшее распространение в технических приложениях имеют парные стратегические бескоалиционные конечные некооперативные игры. Модель проблемной ситуации в этом случае имеет вид:
< U, V, W1, W2, R1, R2 >,
где
U - множество стратегий оперирующей стороны (конструктора);
V - множество стратегий оппонирующей стороны (технолог и природа);
W1 и W2 - показатели качества игроков;
R1 и R2 - системы предпочтения игроков.
Системы предпочтения игроков, в свою очередь, основываются на двух ведущих принципах рационального поведения: принципе наибольшего гарантированного результата и принципе равновесия.
Первый основан на том, что рациональным выбором одного из игроков должен считаться такой, при котором он рассчитывает на самую неблагоприятную для него реакцию со стороны другого игрока.
Второй принцип гласит, что рациональным выбором любого игрока считается такая стратегия u$ (или v$), для которой ситуация (u$, v$) обоюдовыгодна: любое отклонение от данной ситуации игры не является выгодным ни для одного из игроков.
Решается парная матричная игра (проектируемое изделие - меры и средства противодействия) с нулевой суммой (выигрыш одной стороны равен проигрышу другой) на основе рассмотрения платежной матрицы, которая представляет собой совокупность значений U и V (пара стратегий (u,v) U x V называется ситуацией игры) а также выигрышей Wij при парном сочетании всевозможных стратегий сторон.
Решение парной матричной игры может быть в чистых стратегиях, когда для каждой из сторон может быть определена единственная оптимальная стратегия, отклонение от которой невыгодно обоим игрокам. Если выгодно использовать несколько стратегий с определенной частотой их чередования, то решение находится в смешанных стратегиях.
Основные особенности использования методов теории заключаются в следующем. В качестве возможных стратегий со стороны проектируемой системы рассматриваются возможные варианты ее строения, из которых следует выбрать наиболее рациональный. В качестве стратегий противника рассматриваются возможные варианты его противодействия, стратегии их применения.
Необходимо отметить, что при рассмотрении игр с использованием адаптивной системы число ее стратегий может быть существенно расширено благодаря реализации "гибких" конструкторских решений. Анализ игровых ситуаций в этом случае может быть направлен не только на выбор рационального варианта проектируемого изделия, но и на определение алгоритмов рационального применения системы в конфликтной ситуации.
Другая особенность применения методов теории игр заключается в выборе решений, получаемых на основе анализа конфликтной ситуации. В теории игр доказывается теорема о том, что оптимальная стратегия для каждого из игроков является оптимальной и для другого. Так, если решение игры получено в чистых стратегиях (имеется седловая точка), то выбор решения однозначен. Например, если для парной антагонистической игры 3x4 составить матрицу, где элементами uij будут выигрыши (проигрыши) игроков, то седловая точка находится на пересечении максимина строк и минимакса столбцов
| Стратегии | Стратегии B | Min | |||
| A | 1 | 2 | 3 | 4 | строк |
| 1 | 8 | 2 | 9 | 5 | 2 |
| 2 | 6 | 5 | 7 | 18 | 5 |
| 3 | 7 | 3 | -4 | 10 | -4 |
| max столбцов | 8 | 5 | 9 | 18 | |
Оптимальными стратегиями будут для A - 2, для B - 2. Цена игры равна 5. Отметим, что в случае наличия седловой точки ни один из игроков не может улучшить стратегию и стратегии называются чистыми. Отметим, что игра с чистыми стратегиями может существовать только при наличии полной информации о действиях противника.
Если же решение игры получено в смешанных стратегиях, то это эквивалентно созданию множества вариантов проектируемого компонента и использованию их с оптимальными частотам, соответствующими оптимальной смешанной стратегии. В случаях, когда не имеется полной информации о действиях противника, вводятся вероятности применения той или иной стратегии в виде векторов
P<n>=<p1, p2, ..., pn> - для игрока A, где  ;
;
Q<m>=<q1, q2, ..., qn> - для игрока B, где  .
.
При этом игрок A выбирает стратегию в соответствии с принципом максимина по выражению:
 ,
,
а игра B по принципу минимакса
 .
.
Рассмотрим пример: пусть рассматривается принятие решения в игре 2x2, где игрок A знает вероятность стратегии 1, то есть p1, тогда очевидно вероятность стратегии 2 будет 1-p, соответственно стратегии игрока B будут q1 и 1-q1. Платежная матрица будет иметь вид:
| B | |||
| q1 | 1-q1 | ||
| A | p1 | a11 | a12 |
| 1-p1 | a21 | a22 |
На основании матрицы и приведенных выше выражений составляется таблица:
| Чистые стратегии игрока B | Ожидаемые выигрыши игрока A |
| 1 | (a11-a21)p1 + a21 |
| 2 | (a12-a22)p1 + a22 |
Из таблицы видно, что ожидаемый выигрыш игрока A линейно зависит от вероятности p1 (в данном случае задача может быть решена графоаналитически). Тогда смешанная стратегия игрока А будет иметь вид
<p*1, p*2>,
то есть игроку A выгодно применять стратегию 1 с частотой (вероятностью) - p1, а стратегию 2 с частотой p2.
Очевидно, что разработка нескольких вариантов изделия сопряжена с большими затратами, не всегда реализуема и затрудняет использование системы. Поэтому при получении решения в смешанных стратегиях рекомендуются следующие случаи принятия окончательного решения:
· для дальнейшего проектирования выбирается тот вариант, который гарантирует максимальное качество (выбор по максиминной стратегии аналогично критерию Вальда);
· выбирается тот вариант, который в смешанной стратегии должен использоваться с максимальной вероятностью;
· реализуется несколько вариантов изделия с частотами, соответствующими смешанной стратегии (создание адаптивно-модульных конструкций).
Важное значение в задачах исследования качества адаптивных систем имеет не только решение игры, но и анализ платежной матрицы. Это особенно важно в тех случаях, когда решение в смешанных стратегиях не реализуется. Этот анализ может проводиться на основе: оценки возможных потерь эффективности в случае реализации чистой стратегии; определения дополнительных затрат на их компенсацию с помощью "гибких" конструкторских решений; оценки достоверности рассмотренных стратегий противодействия; определения возможности реализации компромиссных вариантов и т.д.
Для анализа конфликтной ситуации требуется на основе математической модели операции построить платежную матрицу [Wmn] =[Wij], где Wij характеризует качество изделия при выборе i-го варианта проектируемого изделия и при j-м варианте противодействия противника.
Решение может быть получено в чистых стратегиях, когда есть седловая точка. Условие седловой точки имеет вид
 , (1.21)
, (1.21)
где левая часть выражения - нижняя цена игры, правая - верхняя цена игры.
Если условие (1.8) не выполняется, то седловая точка отсутствует и требуется реализация смешанной стратегии.
Решение в смешанных стратегиях состоит в реализации чистых стратегий с различными вероятностями, задаваемыми распределением:
для проектируемого изделия в виде вектора-столбца
G = {gi}, где i = 1,2 ...m;  ;
;
для противодействия в виде вектора-строки
F = {fj}, где j = 1,2 ...n;  ,
,
где
gi - вероятность выбора стратегии ui;
fj - вероятность выбора стратегии vj.
Платежную функцию запишем в следующем виде:
 (1.22)
(1.22)
где индексом "т" обозначена процедура транспонирования.
Платежная функция W(G,F) всегда имеет седловую точку, т.е. всегда существует решение матричной игры. Это утверждение соответствует основной теореме теории матричных игр: каждая матричная игра с нулевой суммой имеет, по крайней мере, одно решение в чистых или смешанных стратегиях.
Последовательность решения игры следующая:
1. Анализируется платежная матрица на предмет исключения заведомо невыгодных и дублирующих стратегий.
1. Проверяется наличие седловой точки по условию (1.21).
2. Если решение в чистых стратегиях отсутствует, то ищется решение в смешанных стратегиях с помощью методов линейного программирования или методом Монте-Карло.
Пример 1.4. Обоснование стратегии эксплуатации
Предположим, что техническая система (агрегат) состоит из 5 блоков, отказ одного из которых ведет к отказу всей системы. Для предупреждения простоя системы можно провести перед началом ее работы проверку и замену неисправного блока. Если проверен не тот блок, то система простаивает, что приводит к убытку Ri (в таблице), который существенно превышает расходы на профилактику и замену (т.е. Rij = 0). Требуется выбрать оптимальную стратегию из условия минимума убытка.
Пусть матрица расходов в зависимости от стратегий имеет вид:
| Отказ блока (стратегии природы) | |||||||
| Проверка | 1 | 2 | 3 | 4 | 5 | max строки | |
| и | 1 | 8 | 2 | 9 | 5 | 6 | 9 |
| замена | 2 | 6 | 5 | 17 | 18 | 7 | 18 |
| (стра- | 3 | 7 | 3 | 14 | 10 | 8 | 14 |
| тегии | 4 | 4 | 6 | 16 | 9 | 19 | 19 |
| эксплуа- | 5 | 12 | 4 | 15 | 8 | 10 | 15 |
| тации) | min столбца | 6 | 2 | 9 | 5 | 6 | |
Ответ: Имеется седловая точка - необходимо во всех случаях проверять первый блок.
Пример 1.5. Зимняя эксплуатация лесовозной дороги
Предположим, что при заготовке леса зимой стоит выбор делать или не делать предварительную расчистку дороги. При этом известны предполагаемые высоты снежного покрова и матрица доходов при применении той или иной стратегии. В данном случае можно реализовать себя как игрока A, а природу, как игроке B:
| B | |||||
| 20 мм | 40 мм | 60 мм | 100 мм | ||
| A | не делать | 2 | 2 | 3 | -1 |
| делать | 4 | 3 | 2 | 6 | |
Решение: Имеем игру 2x4. Эта игра не имеет седловой точки. Ожидаемые выигрыши игрока A, соответствующие чистым стратегиям B представлены в таблице
| Чистые стратегии B | Ожидаемые выигрыши A |
| 1 2 3 4 | -2x1 + 4 -x1 +3 x1 + 2 -7x1 + 6 |
Далее оптимальное решение - максимин находится графоаналитическим методом. Значение игры в данном случае равно 5/2.
Литература :
1. Андреев В.Н., Герасимов Ю.Ю. Принятие оптимальных решений: Теория и применение в лесном деле. Йоэнсуу: Из-во ун-та Йоэнсуу, 1999. 200 с.
2. Беллман Р., Калаба Р. Динамическое программирование и современная теория управления. М.: Наука, 1969. 120 с.
3. Вентцель Е.С. Элементы динамического программирования. М.: Наука, 1964. 176 с.
4. Вентцель Е.С. Исследование операций: задачи, принципы, методология. М.: Наука, 1988.
5. Юдин Д.Б. Задачи и методы стохастического программирования. М.: Сов. радио, 1979. 392 с .
6. Davis L.S., Johnson K.N. Forest management. New York: McGraw-Hill Book Company, 1987. 790 p.
7. Моисеев Н.Н., Математические методы системного анализа М. Наука 1981 487 с.
8. http://www.petrsu.ru/Faculties/Forest/courses/decision/decis_a.htm
Кыргызско – Российский Славянский Университет
Естественно-Технический Факультет
Кафедра Математики
Реферат
по предмету: “Теория Игр”
На тему
“Принятие оптимальных решений в условиях неопределенности “
Выполнил: Алексеенко Н.С.
Проверил: :Жданов Н.В.
Бишкек-2001
1.1. Постановка задачи
Как правило, большинство реальных инженерных задач содержит в том или ином виде неопределенность. Можно даже утверждать, что решение задач с учетом разного вида неопределенностей является общим случаем, а принятие решений без их учета - частным. Однако, из-за концептуальных и методических трудностей в настоящее время не существует единого методологического подхода к решению таких задач. Тем не менее, накоплено достаточно большое число методов формализации постановки и принятия решений с учетом неопределенностей. При использовании этих методов следует иметь в виду, что все они носят рекомендательный характер и выбор окончательного решения всегда остается за человеком (ЛПР).
Как уже указывалось, при решении конкретных задач с учетом неопределенностей инженер сталкивается с разными их типами. В исследовании операций принято различать три типа неопределенностей:
· неопределенность целей;
· неопределенность наших знаний об окружающей обстановке и действующих в данном явлении факторах (неопределенность природы);
· неопределенность действий активного или пассивного партнера или противника.
В приведенной выше классификации тип неопределенностей рассматривается с позиций того или иного элемента математической модели. Так, например, неопределенность целей отражается при постановке задачи на выборе либо отдельных критериев, либо всего вектора полезного эффекта.
С другой стороны, два другие типа неопределенностей влияют, в основном, на составление целевой функции уравнений ограничений и метода принятия решения. Конечно, приведенное выше утверждение является достаточно условным, как, впрочем, и любая классификация. Мы приводим его лишь с целью выделить еще некоторые особенности неопределенностей, которые надо иметь в виду в процессе принятия решений.
Дело в том, что кроме рассмотренной выше классификации неопределенностей надо учитывать их тип (или "род") с точки зрения отношения к случайности.
По этому признаку можно различать стохастическую (вероятностную) неопределенность, когда неизвестные факторы статистически устойчивы и поэтому представляют собой обычные объекты теории вероятностей - случайные величины (или случайные функции, события и т.д.). При этом должны быть известны или определены при постановке задачи все необходимые статистический характеристики (законы распределения и их параметры).
Примером таких задач могут быть, в частности, система технического обслуживания и ремонта любого вида техники, система организации рубок ухода и т.д.
Другим крайним случаем может быть неопределенность нестохастического вида (по выражению Е.С.Вентцель- "дурная неопределенность"), при которой никаких предположений о стохастической устойчивости не существует. Наконец, можно говорить о промежуточном типе неопределенности, когда решение принимается на основании каких-либо гипотез о законах распределения случайных величин. При этом ЛПР должен иметь в виду опасность несовпадения его результатов с реальными условиями. Эта опасность несовпадения формализуется с помощью коэффициентов риска.
Рассмотрим примеры и методы принятия решений с учетом указанных выше типов неопределенностей.
Пример 1.1. Лесопосадки
Допустим, что ставится задача наиболее эффективного выращивания саженцев при лесопосадках путем внесения в почву определенного количества удобрений (или создания наиболее эффективной системы гидромелиорации). При этом, как правило, используются стратегии, максимизирующие доход (например, прирост древесины), или минимизирующие расход (стоимость удобрений или затрат на мелиорацию). При этом, очевидно, что обе цели противоречат друг другу и с точки зрения строго научной постановки задача не имеет решения, ибо минимум затрат - нуль, а с нулевыми затратами добиться какого-либо эффекта теоретически невозможно.
Пример 1.2. Проектирование лесных машин
Другим очень распространенным примером является создание любой машины. В частности, при создании лесной машины ставятся задачи получения максимальной производительности, минимального влияния на окружающую среду, высокой надежности и минимальной себестоимости. Противоречивость целей здесь налицо и реальная конструкция всегда будет каким-то компромиссом, достигаемым путем определенных уступок по каким-либо качествам. Собственно, в получении таких компромиссных решений и заключается основная проблема.
Таким образом, неопределенность целей требует привлечения каких-либо гипотез, помогающих получению однозначных решений. В данном случае учет фактора неопределенности цели , как уже указывалось, приводит к необходимости рассмотрения другой проблемы, которая формулируется в виде проблемы принятия оптимальных многоцелевых решений, которая подробно рассматривается авторами в главе 7. В этой же главе мы рассмотрим указанные выше другие типы неопределенностей.
Принятие решений в условиях риска
Как указывалось выше, с точки зрения знаний об исходных данных в процессе принятия решений можно представить два крайних случая: определенность и неопределенность. В некоторых случаях неопределенность знаний является как бы "неполной" и дополняется некоторыми сведениями о действующих факторах, в частности, знанием законов распределения описывающих их случайных величин. Этот промежуточный случай соответствует ситуации риска. Принятие решений в условиях риска может быть основано на одном из следующих критериев:
· критерий ожидаемого значения;
· комбинации ожидаемого значения и дисперсии;
· известного предельного уровня;
· наиболее вероятного события в будущем.
Рассмотрим более подробно применение этих критериев.
Дата: 2019-04-23, просмотров: 441.