Расчет эквивалентной мощности и выбор АД
Проверка выбранного двигателя по нагреву
Проверка на перегрузку при снижении напряжения
Расчет теплового состояния АД
Расчет механических характеристик
1.7 Расчет резисторов пускового реостата
1.8 Расчет электрических потерь при пуске двигателя
Управление пуском асинхронных двигателей
2.1 Общие положения
Управление пуском АД с короткозамкнутым ротором
2.3 Управление пуском АД с фазным ротором в функции времени
3 Управление реверсом АД с короткозамкнутым ротором
Заключение
Библиографический список
Введение
Асинхронные двигатели широко используются в промышленности благодаря простоте их конструкции, надежности в эксплуатации и сравнительно низкой себестоимости.
Наиболее простыми в отношении устройства и управления, надежными в эксплуатации, имеющими наименьшую массу, габариты и стоимость при определенной мощности, являются асинхронные двигатели с короткозамкнутым ротором. Их масса на единицу мощности в 1,5-2,0 раза ниже, чем у машин постоянного тока. Чаще всего асинхронные двигатели применяются при невысокой частоте включений, когда не регулируют частоту вращения или возможно ступенчатое её регулирование.
В установках, где требуется регулирование частоты вращения в относительно небольших пределах, необходимы плавный пуск, хорошие тормозные качества, ограничение токов в переходных процессах и т.д., находят широкое применение асинхронные двигатели с фазным ротором. Характерной особенностью этих двигателей является возможность уменьшения с помощью реостатов их пусковых токов при одновременном увеличении пускового момента.
При выборе двигателя по мощности следует исходить из необходимости его полного использования в процессе работы. В случае завышения номинальной мощности двигателя снижаются технико-экономические показатели электропривода, т.е. КПД и коэффициент мощности. Если же нагрузка на валу двигателя превышает номинальную, то это приводит к росту токов в его обмотках, а значит и потерь мощности выше соответствующих номинальных значений.
Для обоснованного выбора асинхронного двигателя необходимо знать, как изменяется нагрузка на валу двигателя во времени, что в свою очередь позволяет судить о характере изменения потерь мощности. С целью определения нагрузки двигателя большинства производственных механизмов, строятся так называемые нагрузочные диаграммы, под которыми понимаются зависимости развиваемых двигателем момента и мощности от времени, т.е. M=f(t) и P=f(t).
Различают следующие режимы работы двигателя: продолжительный при постоянной нагрузке на валу двигателя; кратковременный; повторно-кратковременный; ударный (момент статистической нагрузки резко увеличивается по различным законам, а затем снижается до момента холостого хода).
Общие положения
Управление электроприводом заключается в осуществлении пуска, регулировании скорости, торможения, реверсирования, а так же поддержании режима работы привода в соответствии с требованиями технологического процесса.
Современные электроприводы для автоматических линий и механизмов обычно строятся с применением релейно–контакторной аппаратуры, на которую возлагаются функции включения питания (подсоединение к сети) силовых блоков и блоков управления, защиты и ввода первоначальных и конечных команд в систему управления приводом. Но наряду с электроприводами, выполняющими сложные функции, в ряде случаев содержащими микропроцессоры или программные устройства управления, существует большое количество электроприводов, на которые возлагаются относительно простые функции. Это обычно нерегулируемые или регулируемые ступенчато в небольшом диапазоне электроприводы с невысоким быстродействием. В задачу систем управления такими электроприводами чаще всего входит организация пуска, торможения, перехода с одной ступени на другую, реверса и осуществление этих операций в определенной последовательности во времени или по командам от рабочей машины, завершившей очередную технологическую операцию. Причем необязательно, чтобы система управления выполняла все эти функции: набор функций зависит от требований к приводу.
Автоматизация упрощает обслуживание механизмов, дает возможность осуществить дистанционное управление электроприводами. Последнее особенно важно там, где нельзя управлять двигателями в непосредственной близости по условиям территориального расположения машин или в связи с особенностями технологического процесса.
Для автоматического управления электроприводами применяются различные аппараты: контакторы, автоматы, регуляторы, реле, кнопочные станции, путевые выключатели, бесконтактные логические элементы, а так же разного рода вспомогательные электрические аппараты и машины. Каждый из этих аппаратов состоит из ряда элементов: электромагнитной системы, создающей необходимое тяговое усилие; главных и вспомогательных контактов и т.д. С помощью проводов отдельные аппараты и их элементы электрически соединяются в общую систему, призванную осуществлять заданные операции в определенной последовательности.
В системах цепи делятся на две категории: цепи главного тока и вспомогательные. К первым относятся цепи двигателей и генераторов. Вспомогательные цепи включают в себя цепи управления, где присоединяются катушки контактов и реле, контактные реле, вспомогательные контакты контакторов и другие элементы аппаратов. Кроме того, к вспомогательным относятся цепи защиты, сигнализации и цепи, связанные со специальными блокировками между отдельными электроприводами.
Принципиальная схема содержит условные графические изображения элементов всех аппаратов и машин, которые располагаются на схеме так, чтобы её было удобно читать, а не по действительному пространственному расположению элементов, т.е. отдельные токоведущие элементы аппаратов и машин показаны на схеме в электрической цепи вне зависимости от кинематической или конструктивной связи этих элементов. Каждому аппарату в схеме присваивается буквенное обозначение, соответствующее функции данного аппарата.
В схемах предусмотрены различные способы защиты двигателей от перегрузки и короткого замыкания, от резкого снижения питающего напряжения и др.
2.2 Управление пуском АД с короткозамкнутым ротором
Схема управления асинхронным двигателем с использованием магнитного пускателя (рисунок 6) включает в себя магнитный пускатель, состоящий из контактора KM и двух встроенных в него тепловых реле защиты KK. Такая схема обеспечивает прямой (без ограничения тока и момента) пуск АД, отключение его от сети, а также защиту от коротких замыканий (предохранители FA) и перегрузки (тепловые реле KK).
Для пуска двигателя замыкается выключатель QF и нажимается кнопка пуска SB1. При этом получает питание катушка контактора KM, который, включившись, своими главными силовыми контактами в цепи статора подключает двигатель к источнику питания, а вспомогательным контактом шунтирует кнопку SB1. Происходит разбег асинхронного двигателя по его естественной характеристике. При нажатии кнопки остановки SB2 контактор KM теряет питание и отключает АД от сети. Начинается процесс торможения асинхронного двигателя выбегом под действием момента нагрузки на его валу.
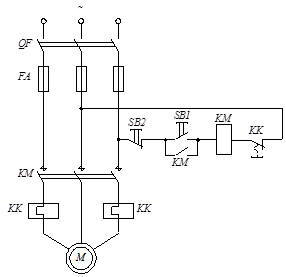
Рисунок 6 – Принципиальная схема управления пуском АД с короткозамкнутым ротором
2.3. Управление пуском АД с фазным ротором в функции времени
Упрощенная схема управления пуском АД с фазным ротором в функции времени в две пусковые ступени приведена на рисунке 7. В данной схеме применены реле времени KT1 и KT2, имеющие свои контакты KT1 и KT2 в цепях силовых контакторов KM2 и KM3. Контакты KT1 и KT2 работают на замыкание после потери питания катушек реле KT1 и KT2 с задержкой по времени.
При замыкании рубильника Q напряжение сразу подается на катушки реле времени KT1 и KT2 через замкнутые контакты KM1 и KM2. Тем самым контакты реле KT1 и KT2 оказываются разомкнутыми. После нажатия кнопки пуска SB1 получает питание катушка контактора KM1, в результате чего подается напряжение на статор двигателя, блокируется кнопка SB1 и теряет питание катушка реле времени KT1. Начинается отсчет времени пуска со всеми пусковыми резисторами. После выдержки времени замыкается контакт KT1, получает питание силовой контактор KM2, что приводит к выводу из цепи ротора резистора RД1 и к потере питания реле времени KT2. По окончании времени установки катушки реле KT2 замыкается контакт реле KT2, получает питание силовой контактор KM3, шунтируется оставшийся резистор RД2, двигатель переходит на естественную характеристику. Все время автоматического пуска складывается из двух установок реле времени KT1 и KT2 и времени разгона двигателя по естественной характеристике.
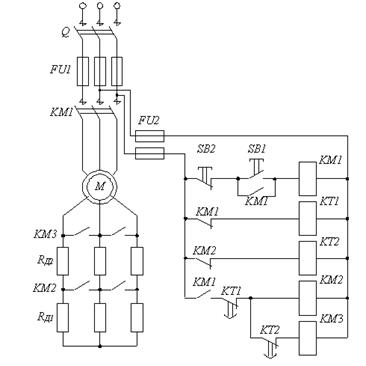
Рисунок 7 – Принципиальная схема пуском АД с фазным ротором
Защита АД предусмотрена такая же, как в схеме , приведенной на рис.7 Нажатием кнопки остановки SB2 двигатель отключается от сетью, при этом катушка контактора КМ1 теряет питание и замыкающие контакторы его КМ1 размыкают цепь статора.
3. Управление реверсом АД с короткозамкнутым ротором
Основным элементом в схеме управления реверсом (рисунок 8) является реверсивный магнитный пускатель, который включает в себя два линейных контактора (KM1 и KM2) и два тепловых реле защиты (KK). Такая схема обеспечивает прямой пуск и реверс асинхронного двигателя, а также торможение АД противовключением при ручном (неавтоматическом) управлении.
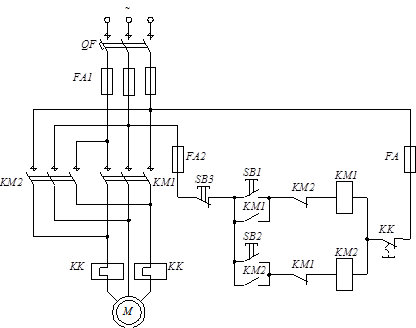
Рисунок 8 – Принципиальная схема управления реверсом АД с короткозамкнутым ротором
В схеме (см. рисунок 8) предусмотрена также защита от перегрузок АД (реле KK) и коротких замыканий в цепях статора (автоматический выключатель QF) и управления (предохранители FA). Кроме того, в ней обеспечивается и нулевая защита от исчезновения (снижения) напряжения сети (контакторы KM1 и KM2).
Пуск двигателя в условном направлении “Вперед” или “Назад” осуществляется нажатием соответственно кнопки SB1 или SB2, что приводит к срабатыванию контактора KM1 или KM2 и подключению АД к сети (при включенном автоматическом выключателе QF).
Для обеспечения реверса или торможения двигателя сначала нажимается кнопка SB3, что приводит к отключению включенного до тех пор контактора (например, KM1), а затем – кнопка SB2, что приводит к включению контактора KM2 и подаче на АД напряжения питания с другим чередованием фаз. После этого магнитное поле двигателя изменяет свое направление вращения и начинается процесс реверса, состоящий из двух этапов – торможения противовключением и разбега в противоположную сторону.
В случае необходимости только затормозить двигатель при достижении им нулевой скорости следует вновь нажать кнопку SB3, что приведет к отключению его от сети и возвращению схемы в исходное положение. Если кнопку SB3 не нажимать, последует разбег АД в другую сторону, т. е. его реверс.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка – рычажная система, которая предотвращает одновременное включение двух контакторов. В дополнение к механической в такой схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления, которая заключается в перекрестном включении размыкающих контактов аппарата KM1 в цепь катушки аппарата KM2, и наоборот.
Отметим, что повышению надежности работы ЭП и удобства его в эксплуатации способствует использование в схеме управления воздушного автоматического выключателя QF, который исключает возможность работы привода при обрыве одной фазы и при однофазном коротком замыкании, как это может иметь место при использовании предохранителей.
Заключение
По заданной нагрузочной диаграмме электропривода определили эквивалентную мощность и выбрали асинхронный двигатель 4АК225M6УЗ с фазным ротором, при чем учли условие Рн≥Рэ. Проверили выбранный двигатель на нагрев по методу средних потерь. Условие ΔРср≤ΔРн, – выполняется. А так же проверили на перегрузочную способность при снижении напряжения в сети. Условие  ,– выполняется. Произвели расчет теплового режима выбранного двигателя по заданной нагрузочной диаграмме, до установившегося теплового состояния двигатель прошел 4 цикла.
,– выполняется. Произвели расчет теплового режима выбранного двигателя по заданной нагрузочной диаграмме, до установившегося теплового состояния двигатель прошел 4 цикла.
Определили сопротивление добавочного резистора, который необходимо включить в цепь ротора выбранного двигателя для снижения частоты вращения на заданную величину при номинальном моменте сопротивления. Построили естественную и реостатную механические характеристики двигателя.
Рассчитали сопротивления секций пускового резистора и потери электрической энергии при реостатном и прямом пуске. Пришли к выводу, что при прямом пуске расходуется в 1,5-2 раза больше энергии.
Начертили и изучили схемы управления пуском и реверсом асинхронных двигателей.
Библиографический список
1. Справочник по Электрические машинам / Под Ред. И.П. Копылова, Б. К. Клокова, М.: Энергоатомиздат, 1998.
2. Чиликин, М.Г. Общий курс электропривода/ М.Г. Чиликин, А. С. Сандлер, М.: Энергоатомиздат, 1984.
3. Вольдек, А.И. Электрические машины / А.И. Вольдек, Л.: Энергия, 1978.
4. Касаткин, А.С. Электротехника / А.С. Касаткин, М. В. Немцов, М.: Высшая школа, 2000.
5. Москаленко, В. В. Электрический привод / В. В. Москаленко, М.: Высшая школа, 1991.
6. Асинхронные двигатели в системах электропривода: методические указания к выполнению курсовой работы / Авилов В. Г., Беляев В. П., Савельева Е. Н., Омский гос. ун-т путей сообщения. Омск, 2005. 44с.
Расчет эквивалентной мощности и выбор АД
Дата: 2019-05-29, просмотров: 384.