В соответствии с рекомендациями выберем систему ТП-Д с подчиненным регулированием координат с настройкой на технический оптимум.
 |
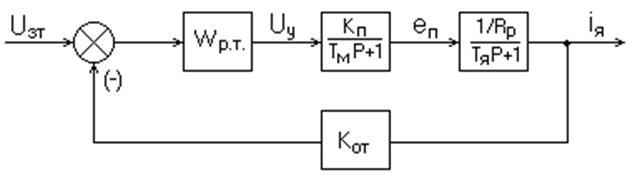
Рис. 8. Принципиальная схема подчиненного регулирования тока и скорости в системе ТП-Д.
2.2.1. Расчет контура тока
Рис. 9. Структурная схема регулирования тока.
Отнесем время запаздывания тиристорного преобразователя tп и инерционность фильтров Тф к некомпенсированным постоянным времени, т.е. Тm=tп+ Тф=0,01 с. Тогда, если не учитывать внутреннюю обратную связь по ЭДС двигателя, можно записать передаточную функцию объекта регулирования тока:
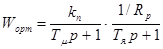 ,
,
где kп – коэффициент усиления преобразователя.
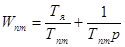
Желаемая передаточная функция прямого канала разомкнутого контура при настройке на технический оптимум:
 ,
,
где ат=Тот/Тm - соотношение постоянных времени контура.
Отношение Wраз.п к Wорт есть передаточная функция регулятора тока:
 ,
,
где Тит – постоянная интегрирования регулятора тока:
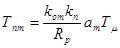
Из выражения для Wр.т. видно, что необходим ПИ-регулятор тока.
Коэффициент усиления пропорциональной части:
kут=Тя/Тпт или kут=Rост/Rзт
Постоянная времени ПИ-регулятора:
Тпт=RзтСост
Компенсируемая постоянная времени регулятора:

Отсюда,
 Ом,
Ом,
где Тя=Тэ – электромагнитная постоянная времени.
Коэффициент обратной связи по току:
 ,
,
где kш – коэффициент передачи шунта;
kут – коэффициент усиления датчика тока.

Шунт выбираем с условием Iшн>Iяmax
 А
А
Выбираем шунт типа ШС-75. Его параметры: Iшн=100 А Uшн=75 мВ
Коэффициент передачи датчика тока:

Примем Rот=Rзт, тогда
 В/А
В/А
Коэффициент усиления преобразователя:
Постоянная интегрирования ПИ-регулятора:

Коэффициент усиления регулятора:

 Ом
Ом
Стопорный ток:
 А
А
Номинальное значение задания:
 В
В
Расчет контура скорости.
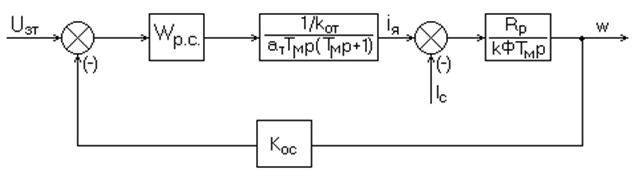 |
Рис. 10. Структурная схема контура скорости.
Объект регулирования скорости состоит из замкнутого контура регулирования тока и механического звена электропривода и имеет вид
 .
.
Некомпенсированная постоянная времени для контура скорости в ат раз больше, чем для контура тока:
 с.
с.
Желаемая передаточная функция разомкнутого контура:
 ,
,
где ас=Тос/Тmс – соотношение постоянных времени. ас=2 в настроенном на технический оптимум контуре.
Передаточная функция регулятора скорости (Wраз.с/Wорс):
 .
.
Очевидно, что необходимо применить пропорциональный регулятор скорости (П-регулятор)
Его коэффициент усиления kус=Wр.с.
В замкнутой системе wс и Мс связаны соотношением:
Коэффициент обратной связи по скорости:
 В/с
В/с
Коэффициент усиления П-регулятора
 .
.
Максимальная скорость холостого хода:

Зададимся Rосс=100 кОм, тогда:
 Ом
Ом
Допустим, используется тахогенератор с kтг=0,32 Вс. Тогда при w0=w0з.max максимальная ЭДС тахогенератора:
 В.
В.
Сопротивление в цепи обратной связи по скорости:
 кОм.
кОм.
Дата: 2019-05-29, просмотров: 344.