Система уравнений для электропривода с линеаризованной механической
Характеристикой будет выглядеть следующим образом:
 ,
,
где b – жесткость электропривода;
 ;
;
g – проводимость машины;
с2 – постоянная машины;
 ;
;
 – электромагнитная постоянная;
– электромагнитная постоянная;

Регулятор проводимости ротора пропорционально – интегральный (ПИ), то есть:
При настройке контура скорости на симметричный оптимум, имеем:


Для ограничения момента и поддержания постоянным ускорения необходим задатчик интенсивности.
Ниже представлена модель для расчета переходного процесса и результаты моделирования. Моделирование выполнено на программном комплексе МИК-АЛ.
$ВВОД
КОНСТ Wz=8.8, J1=1.109, J2=0.502, Te=0.0055, Mc1=15.9, Mc2=5.2, R2=6.21,
Jmin=0.502, W0=104.7, Em=27, C2=11.5
*****************************************************************
КОНСТ Krg=(Jmin/2/Te), Trg=(40*Te*Te/Jmin), gm=(1/R2), dJ=(J1-J2), dMc=(Mc1-Mc2)
*****************************************************************
1V V=Wz
2V V=-Wz T=29
3V V=-Wz T=120
4V V=Wz T=149
5U W=1 ВХ=1+2+3+4
6V V=J1
7V V=-dJ T=120
8U W=1 ВХ=6+7
9V V=Mc1
10V V=-dMc T=120
11U W=1 ВХ=9+10
*********************РЕГУЛЯТОРЫ***********************************
12U W=1 ВХ=21+31
13N ДЕЛ ВХ=12+14
14N МОДУЛЬ ВХ=23
15U W=Krg ВХ=13
16C ИНТ_ОГР ПАР=1, Trg, gm, 0 ВХ=13
17N ОГРАН ПАР=gm ВХ=15+16
18N МОДУЛЬ ВХ=17
19N РЕЛЕ ПАР=W0 ВХ=17
32D Z_H ВХ=19
*********************ЗАДАТЧИК ИНТЕНСИВНОСТИ***********************
20N РЕЛЕ ПАР=Em ВХ=5+22
21L W=1/P ВХ=20
22U W=-1 ВХ=21
**********************ОБЬЕКТ УПРАВЛЕНИЯ***************************
23U W=C2 ВХ=32+31
24N УМН ВХ=23+18
25L W=1/Te*P+1 ВХ=24
38N УМН ВХ=25+37
26U W=1 ВХ=38+30
27N ДЕЛ ВХ=26+8
28L W=1/P ВХ=27
29N РЕЛЕ ПАР=-1 ВХ=28
30N УМН ВХ=29+11
31U W=-1 ВХ=28
*********************ПРОСТОЙ ДВИГАТЕЛЯ*****************************
33V V=1
34V V=-1 T=32.4
35V V=1 T=120
36V V=-1 T=152.4
37U W=1 ВХ=33+34+35+36
70N УМН ВХ=37+30
71U W=-1 ВХ=70
********************ПАРАМЕТРЫ ЭКСПЕРИМЕНТА ************************
ИНТ RKT4
ШАГ ИНТ=0.008
ШАГ ВЫВ=0.1
КОН ВР=200
ВЫХОДЫ 28=W, 38=M, 71=Mc, 26=Mdin
ВЫВОД 28,38,71,26
$КОН
$СТОП
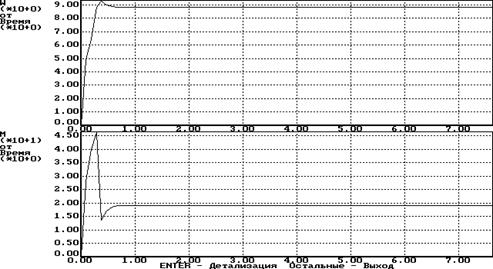
Результаты моделирования.


Рис. 9
Пуск электропривода на номинальную скорость (w=88 рад/с)
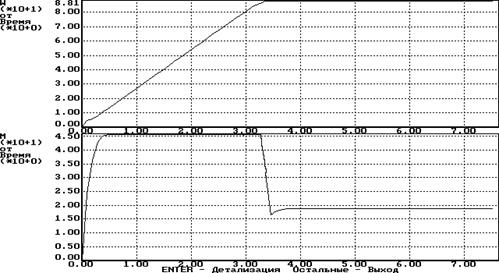
Пуск электропривода на номинальную скорость (w=88 рад/с) при пониженном моменте инерции.
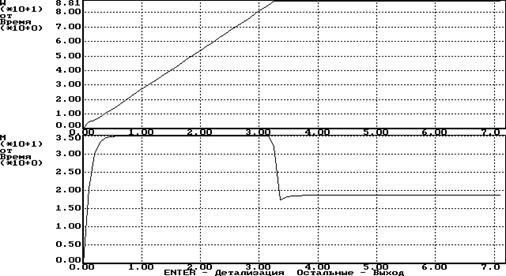
Рис. 10
Пуск электропривода на минимальную скорость (wmin=0.1*wnom= 8.8 рад/с)
Пуск электропривода на минимальную скорость пониженном моменте инерции.
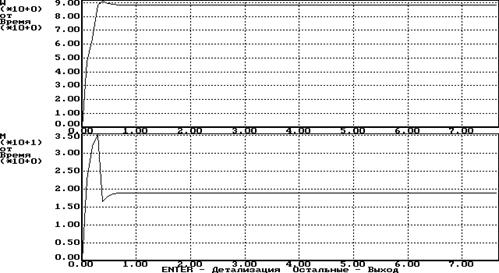
Рис. 11
При пуске двигателя на минимальную скорость, время пуска tп существенно меньше, чем на номинальную скорость. Из-за этого пусковой момент не успевает выйти на устанавившееся значение и сразу же изменяется до значения Mст1.
И при максимальном и при минимальном заданиях двигатель развивает необходимую скорость (88 рад/с и 8.8 рад/с).
На графиках для опытов с пониженными моментами инерции видно, что пусковой момент снижается (М’п1<Мп1).Следовательно, снижается и потребляемая из сети энергия, пропорциональная моменту и угловой скорости. Снизить моменты инерции механизма можно, уменьшив массу тележки или диаметр ходового колеса. Но для этого надо внедрять новые материалы, обеспечивающие те же конструкционные характеристики при меньшей массе и диаметр В этом курсовом проекие рассмотрены групповой электропривод, то есть от одного электродвигателя управление осуществляется двумя исполнительными органами (колеса тележки). Структурная схема системы управления составлена для индивидуального однодвигательного привода, так как диаметры валов, передающих врашение колесам, не превышают 8000 мм и считаем муфты на них жесткими.
Заключение
В данном курсовом проекте была проведена следующая работа:
– выбор основных технических параметром тележки по прототипу.
- расчет нагрузочных характеристик и выбор двигателя.
- Проверка выбранного двигателя по нагреву.
- Технико-экономический анализ систем управления.
- Выбор системы управления.
- Моделирование переходных процессов в электроприводе.
Комплексный анализ всех вышеперечисленных пунктов свидетельствует о правильности решения задачи в целом: выбранный двигатель работает на всю свою мощность, а импульсно – ключевая система управления отрабатывает задание с минимальной ошибкой регулирования даже на малых скоростях.
Торможение привода осуществляется противовключением до некоторой скорости, при которой оно уже неэффективно. Вторым этапом является механическое торможение. Причем механический тормоз включается заранее (с учетом его времени срабатывания 0,2с), так чтобы останов завершился к концу интервала tT.
Список литературы
1. Справочник по кранам: В 2 томах. Том 1. Под общей редакцией М.М. Гохберга. – М.: «Машиностроение», 1988.
2. Справочник по кранам: В 2 томах. Том 2. Под общей редакцией М.М. Гохберга. – М.: «Машиностроение», 1988.
3. Чиликин М.Г. Общий курс электропривода. М., «Энергия».
4. Москаленко В.В. Автоматизированный электропривод. – Москва: «Энергоатомиздат»; 1986.
5. Ключев В.И. Теория электропривода. – М.: Энергоатомиздат, 1985.
6. Справочник по автоматизированному электроприводу/ Под ред.
Елисеева В.А. и Шинянского А.В. – М.: Энергоатомиздат, 1983.
7. Шенфельд Р., Хабигер Э. Автоматизированные электроприводы. Пер. с нем./ Под ред. Борцова Ю.А. – Л.: Энергоатомиздат, 1985.
8. Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами/ Под ред.
Круповича В.И. и др. – М.: Энергоатомиздат, 1982.
9. Справочник по электрическим машинам. В 2-х т. М.: Энергоатомиздат, 1988.
Дата: 2019-05-28, просмотров: 315.