Введение
Бурный технический прогресс в области электротехники и электроники, наблюдающийся в последние годы, привел к существенным изменениям в теории и практике электрического привода. Эти изменения прежде всего касаются создания новой элементной базы и технических средств автоматизации, быстрого расширения областей и объемов применения регулируемого электропривода, который преимущественно реализуется в виде тиристорного и транзисторного электропривода постоянного и переменного тока. В последнее время все больший интерес и развитие получает управляемый синхронный привод, являющийся самым перспективным видом электропривода по многим важным показателям. Существенные изменения произошли также в развитии автоматических систем управления электроприводами. Эти системы характеризуются преимущественным использованием принципов подчиненного регулирования, расширением практического применения адаптивного управления, развитием работ по векторным принципам управления электроприводами с двигателями переменного тока, применением аналоговых и цифроаналоговых систем управления на базе интегральных микросхем. Все шире используются управляющие вычислительные машины различных уровней, развиваются работы про прямому цифровому управлению электроприводами.
Целью данного курсового проекта является разработка электропривода для механизма передвижения тележки, выбор оптимальной системы управления с учетом технико-экономических показателей, а также проверка выбранной системы на отработку заданных перемещений.
Определение режимов работы механизма
Выбор основных параметров
Определение режимов работы крана
Режим работы крюковых опорных двух балочных кранов регламентированы ГОСТ 25711–83 (грузоподъемность 5–50 т) и ГОСТ 24378–80 (гост на технические условия).
По ГОСТ 25546–82 режим работы для кранов, управляемых из кабины относится к группе 5К-7К [2].
Данный режим характеризуется следующими особенностями; постоянная работа с грузами, близкими по массе к номинальным, с высокими скоростями, большим числом включений, высокой продолжительностью включения ПВ.
Такой режим характерен для механизмов технологических кранов, цехов и складов на заводах с крупносерийным производством, кранов литейных цехов и механизмы подъема строительных кранов.
При интенсивном использовании общее число циклов работы крана за срок его службы составляет 500000..1000000, что соответствует классу использования С6 согласно [1], табл. 1.2.6.
При постоянной работе крана с грузом относительно большой массы, приближающейся к номинальной класс нагружения соответствует Q4 [1], табл. 1.2.7.
Группа режима работы крана определяется по известным классу использования и классу нагружения крана. По таблице 1.2.8 [1] выбираем группу режима 7К.
Выбор системы управления
Расчет параметром двигателя
Критическое скольжение:
 , где
, где  -номинальное скольжение.
-номинальное скольжение.
 - синхронная частота вращения;
- синхронная частота вращения;

 - номинальная частота вращения;
- номинальная частота вращения;

Тогда:
MH-номинальный момент двигателя;
MH= 
Таким образом:
Отношения сопротивлений:
a= 
 0.264
0.264
Сопротивление статора:
Приведенное сопротивление ротора:
 .
.
Индуктивное сопротивление короткого замыкания:
Проверка двигателя по пусковому моменту:
Для того чтобы двигатель разогнался, необходимо выполнение следующего условия:
M п 
M п = 
49,5>(1,5…2)*18,9 – условие выполняется.
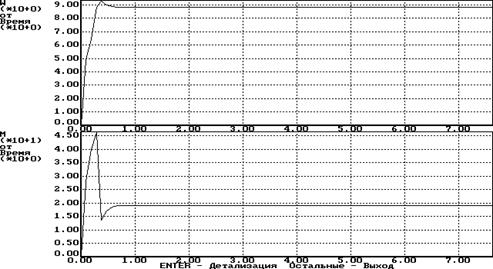
Рис. 9
Пуск электропривода на номинальную скорость (w=88 рад/с)
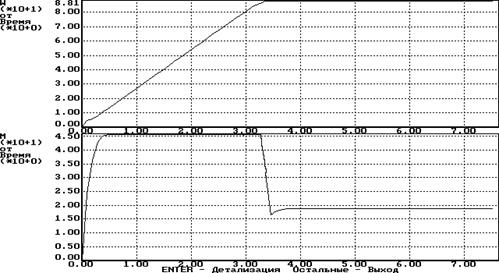
Пуск электропривода на номинальную скорость (w=88 рад/с) при пониженном моменте инерции.
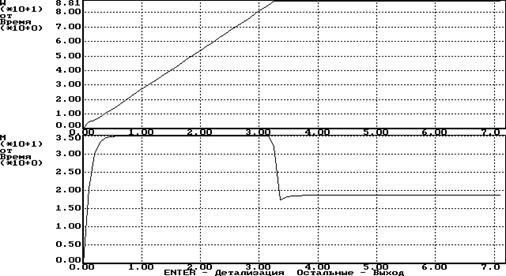
Рис. 10
Пуск электропривода на минимальную скорость (wmin=0.1*wnom= 8.8 рад/с)
Пуск электропривода на минимальную скорость пониженном моменте инерции.
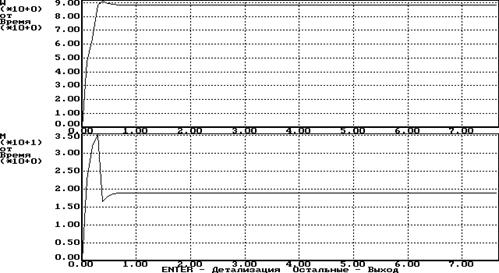
Рис. 11
При пуске двигателя на минимальную скорость, время пуска tп существенно меньше, чем на номинальную скорость. Из-за этого пусковой момент не успевает выйти на устанавившееся значение и сразу же изменяется до значения Mст1.
И при максимальном и при минимальном заданиях двигатель развивает необходимую скорость (88 рад/с и 8.8 рад/с).
На графиках для опытов с пониженными моментами инерции видно, что пусковой момент снижается (М’п1<Мп1).Следовательно, снижается и потребляемая из сети энергия, пропорциональная моменту и угловой скорости. Снизить моменты инерции механизма можно, уменьшив массу тележки или диаметр ходового колеса. Но для этого надо внедрять новые материалы, обеспечивающие те же конструкционные характеристики при меньшей массе и диаметр В этом курсовом проекие рассмотрены групповой электропривод, то есть от одного электродвигателя управление осуществляется двумя исполнительными органами (колеса тележки). Структурная схема системы управления составлена для индивидуального однодвигательного привода, так как диаметры валов, передающих врашение колесам, не превышают 8000 мм и считаем муфты на них жесткими.
Заключение
В данном курсовом проекте была проведена следующая работа:
– выбор основных технических параметром тележки по прототипу.
- расчет нагрузочных характеристик и выбор двигателя.
- Проверка выбранного двигателя по нагреву.
- Технико-экономический анализ систем управления.
- Выбор системы управления.
- Моделирование переходных процессов в электроприводе.
Комплексный анализ всех вышеперечисленных пунктов свидетельствует о правильности решения задачи в целом: выбранный двигатель работает на всю свою мощность, а импульсно – ключевая система управления отрабатывает задание с минимальной ошибкой регулирования даже на малых скоростях.
Торможение привода осуществляется противовключением до некоторой скорости, при которой оно уже неэффективно. Вторым этапом является механическое торможение. Причем механический тормоз включается заранее (с учетом его времени срабатывания 0,2с), так чтобы останов завершился к концу интервала tT.
Список литературы
1. Справочник по кранам: В 2 томах. Том 1. Под общей редакцией М.М. Гохберга. – М.: «Машиностроение», 1988.
2. Справочник по кранам: В 2 томах. Том 2. Под общей редакцией М.М. Гохберга. – М.: «Машиностроение», 1988.
3. Чиликин М.Г. Общий курс электропривода. М., «Энергия».
4. Москаленко В.В. Автоматизированный электропривод. – Москва: «Энергоатомиздат»; 1986.
5. Ключев В.И. Теория электропривода. – М.: Энергоатомиздат, 1985.
6. Справочник по автоматизированному электроприводу/ Под ред.
Елисеева В.А. и Шинянского А.В. – М.: Энергоатомиздат, 1983.
7. Шенфельд Р., Хабигер Э. Автоматизированные электроприводы. Пер. с нем./ Под ред. Борцова Ю.А. – Л.: Энергоатомиздат, 1985.
8. Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами/ Под ред.
Круповича В.И. и др. – М.: Энергоатомиздат, 1982.
9. Справочник по электрическим машинам. В 2-х т. М.: Энергоатомиздат, 1988.
Введение
Бурный технический прогресс в области электротехники и электроники, наблюдающийся в последние годы, привел к существенным изменениям в теории и практике электрического привода. Эти изменения прежде всего касаются создания новой элементной базы и технических средств автоматизации, быстрого расширения областей и объемов применения регулируемого электропривода, который преимущественно реализуется в виде тиристорного и транзисторного электропривода постоянного и переменного тока. В последнее время все больший интерес и развитие получает управляемый синхронный привод, являющийся самым перспективным видом электропривода по многим важным показателям. Существенные изменения произошли также в развитии автоматических систем управления электроприводами. Эти системы характеризуются преимущественным использованием принципов подчиненного регулирования, расширением практического применения адаптивного управления, развитием работ по векторным принципам управления электроприводами с двигателями переменного тока, применением аналоговых и цифроаналоговых систем управления на базе интегральных микросхем. Все шире используются управляющие вычислительные машины различных уровней, развиваются работы про прямому цифровому управлению электроприводами.
Целью данного курсового проекта является разработка электропривода для механизма передвижения тележки, выбор оптимальной системы управления с учетом технико-экономических показателей, а также проверка выбранной системы на отработку заданных перемещений.
Определение режимов работы механизма
Выбор основных параметров
Дата: 2019-05-28, просмотров: 296.