В группу устройств оперативного управления входят блоки БРУ, БЗИ и РЗД.
Блок ручного управления (БРУ) предназначен для выбора вида управления исполнительным механизмом (автоматическое или ручное), осуществления визуального контроля за положением выходного вала электрического ИМ, осуществления световой индикации положения элементов цепей управления.
Блок интегрирующего задатчика (БЗИ) предназначен для интегрирования импульсных сигналов, преобразования значения интеграла в эквивалентное значение аналогового сигнала и запоминания значения интеграла при отсутствии входных сигналов или снятии питающего напряжения. Блок предназначен для формирования совместно с релейным регулирующим прибором РП4 корректирующего воздействия.
Блок ручной задатчика (РЗД) предназначен для ручного ввода унифицированного сигнала от 0 до 5 мА в функциональные блоки. Блок выполняет также функции преобразования основных видов унифицированных сигналов и усиления по мощности унифицированного сигнала.
Рассмотрим принципы построения автоматических систем с применением блоков АКЭСР-2.
В АСР, реализуемых с использованием блоков системы АКЭСР-2, сигнал от датчика поступает на вход регулирующего прибора. Сигнал задания формируется задатчиком РЗД и тоже поступает на вход РП4, где вместе с сигналом обратной связи ИМ формируется сигнал рассогласования. Управление объектом от РП4 может осуществляться как автоматически, так и дистанционно. Переключение это осуществляется ключом выбора режимов блока управления БРУ-42. В автоматическом режиме сигнал рассогласования обрабатывается в РП4 в соответствии с законом регулирования и через ключ блока ручного управления БРУ-42, установленный в положение «А» (автоматическое), поступает на усилитель ПБР-2М, который управляет исполнительным механизмом МЭО. В режиме ручного управления сигнал формируется путем нажатия кнопок «Б» (больше) и «М» (меньше), встроенных в БРУ-42. Сигнал от датчика положения ИМ поступает на индикатор, встроенный в БРУ-42.
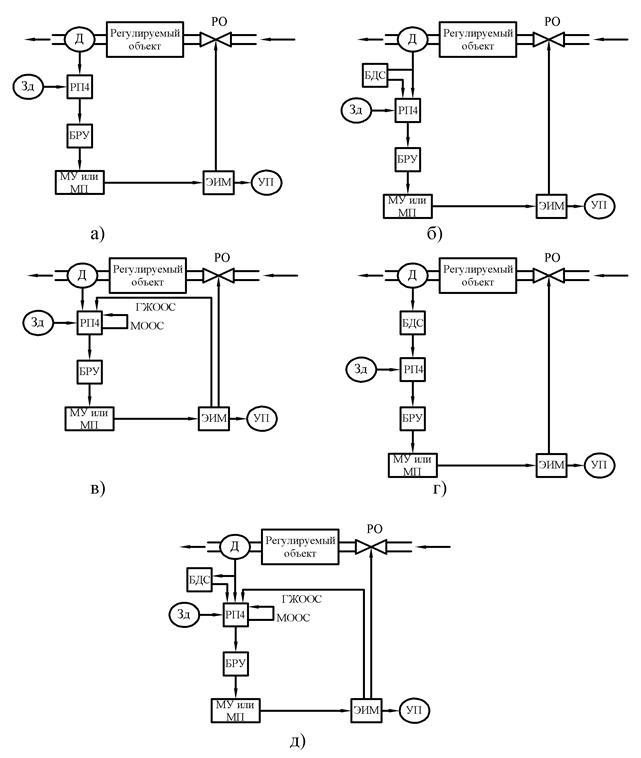
Рис. 6.2. принципы построения автоматических систем с
применением блоков АКЭСР-2
а) Структурная схема АСР с ПИ-регулятором,
б) Структурная схема АСР с ПИД-регулятором,
в) Структурная схема АСР с П-регулятором,
г) Структурная схема АСР с И-регулятором.
д) Структурная схема АСР с ПД-регулятором,
Автоматические системы с законом ПИ-регулирования реализуются с применением только регулирующего прибора РП4 (Рис. 6.2, а) где Зд – задатчик; Д – датчик; РО – регулирующий орган; УП – указатель положения; ЭИМ – электрический исполнительный механизм; МУ – магнитный усилитель; МП – магнитный пускатель). Автоматические системы с законом ПИД-регулирования реализуются на базе ПИ-регулятора, на вход которого дополнительно поступает сигнал от блока БДС, работающего в режиме дифференцирующего звена (Рис. 6.2, б).
При введении в АСР жесткой обратной связи по положению выходного вала ИМ регулирующий прибор РП4 обеспечивает формирование закона П-регулирования (Рис. 6.2, в) где ГЖООС – главная жесткая отрицательная обратная связь; МООС – местная отрицательная обратная связь).
Регулятор с законом ПД-регулирования реализуется на базе П-регулятора, на вход которого дополнительно поступает сигнал через блок БДС, работающий в режиме дифференцирующего звена (Рис. 6.2, г).
Интегральный закон регулирования реализуется теми же блоками, что и ПИ-регулятор, но входной сигнал в этом случае поступает через блок динамической связи БДС, работающий в режиме демпфера (Рис. 6.2, д).
Регуляторы РП4 можно использовать в АСР каскадно-связанного регулирования в качестве ведущего (корректирующего) регулятора. В этом случае выход регулятора подключается к импульсному интегратору БЗИ.
Дата: 2019-04-23, просмотров: 497.