Механической характеристикой (МХ) двигателя является зависимость частоты вращения от момента нагрузки на валу при постоянных значениях напряжения U1 и частоты питающей сети f, т.е.
n2=f(M).
МХ по существу является обратной зависимостью по отношению к зависимости момента вращения от скольжения, показанной на рис. 5.10.
Действительно, из выражения (5.7) при s=0 получим n2=n1, а при s=1, n2=0. Поэтому, если перенести ось ординат в точку s=1 получим n2=0, повернув оси координат на 90° по часовой стрелке, получим механическую характеристику n2=f(M), приведенную на рис. 5.11, б.
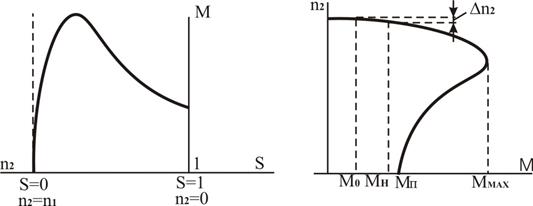
а) б)
Рис.22.11 Механическая характеристика ТАД
Видим, что при изменении момента нагрузки на валу от нуля до номинального (0<М<Мн) скорость вращения изменяется всего лишь на несколько процентов от скорости вращения ВМП. Такая механическая характеристика считается жесткой. Это обусловлено тем, что скольжение s на холостом ходу двигателя около 1%, а в номинальном режиме (4...8)%. Отсюда уменьшение скорости вращения в рабочем диапазоне нагрузок составляет
Dn2=n1 – n2»(0,01…0,1)n1.
Рабочие характеристики
Свойства двигателя в рабочем режиме определяются рабочими характеристиками. Рабочие характеристики представляют следующие зависимости: потребляемой мощности – Р1; потребляемого тока – I1; коэффициента мощности - cosj1; коэффициента полезного действия (КПД) - h; момента вращения Мвр; частоты вращения – n2; скольжения –s от полезной мощности на валу двигателя – Р2, при номинальном напряжении U1 и постоянной частоте f питающей сети.
Полезная механическая мощность
Р2=w2М, Вт, (22.12)
где w2=  –угловая скорость двигателя или круговая частота вращения, рад/с;
–угловая скорость двигателя или круговая частота вращения, рад/с;
n2 – скорость вращения ротора, об/мин.
Рабочие характеристики определяются для области устойчивой работы, как правило, экспериментальным путем. Примерный вид рабочих характеристик показан на графиках рис. 5.12.
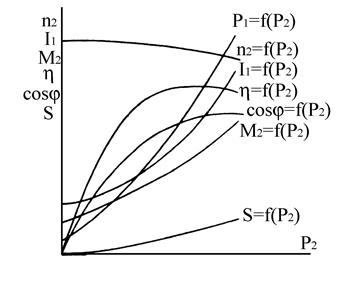
Рис.22.12 Рабочие характеристики
Поясним некоторые рабочие характеристики. Частота вращения n2 при изменении нагрузки 0<Р2<Р2н уменьшается незначительно, так как механическая характеристика у ТАД жесткая и скольжение при номинальной нагрузке невелико (Sн=4...8%) .
Момент вращения, как видно из формулы 22.12, связан с полезной мощностью простым соотношением по линейному закону. Поэтому зависимость Мвр=f(P2) носит почти линейный характер. однако при Р2=0, момент вращения не равен нулю, т.к. в двигателе существуют потери энергии и Мвр=Мпот (момент потерь).
Потребляемый из сети ток I1 на холостом ходе создает ВМП и имеет малую активную и большую реактивную составляющие. С ростом нагрузки активный ток увеличивается и становится больше реактивного.
Активная потребляемая мощность Р1 на холостом ходе мала и расходуется на покрытие потерь механических и в магнитопроводе. С увеличением нагрузки растет потребляемый активный ток и растет активная потребляемая мощность.
Коэффициент мощности двигателя определяется по известной формуле
cosj1=  , (22.13)
, (22.13)
где S1, P1,Q1 – полная, активная и реактивная мощности двигателя.
На холостом ходе активная мощность мала, а реактивная, идущая на создание ВМП, велика. Поэтому cosj1 на холостом ходу весьма мал cosj = 0,08...0,2. Это является существенным недостатком асинхронных двигателей, т.к. они ухудшают качество (коэффициент мощности) питающей сети. С ростом Р2 быстро растет активная потребляемая мощность – Р1, а реактивная – Q1 практически остается постоянной. Поэтому cosj1 увеличивается и при номинальной нагрузке становится максимальным и достигает значений 0,75...0,85 .
Дальнейшее увеличение нагрузки приводит к уменьшению числа оборотов и к росту активной, и особенно реактивной мощности, что приводит к уменьшению коэффициента мощности.
Скольжение s с ростом нагрузки увеличивается, так как уменьшается скорость вращения двигателя.
Коэффициент полезного действия (КПД) определяется, как обычно, отношением полезной мощности (механическая мощность на валу двигателя) Р2 к затраченной, т.е. потребляемой из сети Р1.
h=  , (22.14)
, (22.14)
где U1, I1 – линейные напряжение и ток;
j1 – угол сдвига фаз между линейным напряжением и током.
С другой стороны КПД можно определить через мощность потерь Рп, например, по формуле
h=  .
.
Физические процессы в асинхронном двигателе и основные математические соотношения во многом аналогичны трансформатору, при этом статор соответствует первичной обмотке, а ротор – вторичной.
В двигателях различают потери постоянные (DРпост) и переменные (DРпер) потери в статоре и роторе, потери электрические и механические. Все разнообразие потерь можно объединить записав,
Рпот=DРпост+DРпер
где DРпост =DРст + DРмех; DРст – потери в стали или магнитные потери в статоре и роторе, а также в воздушном зазоре между ними;
DРмех – механические потери в подшипниках, контактных кольцах и за счет трения о воздух.
Потери в стали, как и у трансформаторов постоянны и их приближенно можно определить на холостом ходе двигателя, когда М®0 и S®0. Однако, следует отметить, что ток холостого хода двигателя примерно в 10 раз больше тока холостого хода трансформатора. Если в трансформаторе ток холостого хода составляет примерно (2...10)% от тока номинального, то у двигателя – (20...50)%. Это обусловлено воздушным зазором между ротором и статором, который увеличивает магнитное сопротивление магнитопровода [1]. Падение напряжения в асинхронном двигателе на холостом ходе также в несколько раз больше, чем у трансформатора и составляет (2...5)% Uном против (0,1...0,4)% у трансформатора.
Переменные потери состоят из электрических потерь в обмотках статора (DРэс ) и ротора (DРэр). Потери в роторе в сильной степени зависят от скольжения, т.е.
DРэр=SDРэм
где DРэм=wтМвр – мощность ВМП;
w1=  – угловая скорость вращения магнитного поля;
– угловая скорость вращения магнитного поля;
s – скольжение.
Кроме того, переменные электрические потери пропорциональны квадрату потребляемого тока. Учитывая это, можно выразить КПД ТАД через коэффициент нагрузки.
b=  .
.
Учитывая, что P2=b×P2H, получаем окончательную формулу для КПД ТАД
h=  , (22.15)
, (22.15)
где DPэн – электрические потери в номинальном режиме.
На холостом ходе, т.к. Р2=0, КПД также равен нулю. Рост нагрузки приводит к быстрому увеличению КПД, т.к. постоянные потери не изменяются, а переменные (потери в проводниках) еще малы. Максимальное КПД двигателя (0,75...0,95) достигается при некоторой его недогрузки, т.е. когда b=0,6. При этом двигатели большей мощности имеют больший КПД.
Дата: 2019-04-23, просмотров: 449.