При включении обмоток статора в трехфазную сеть появляется вращающееся магнитное поле статора, под влиянием которого приводится во вращение ротор.
Вращающееся магнитное поле
Принцип получения вращающегося магнитного поля (ВМП) с помощью неподвижной системы проводников заключается в том, что по проводникам обмоток статора сдвинутых по дуге окружности на углы a и g (рис. 22.6 и 22.8), протекают токи сдвинутые по фазе относительно друг друга на углы 120°. Создаются замкнутые магнитные поля с определенным количеством магнитных полюсов, которые с течением времени вращаются.
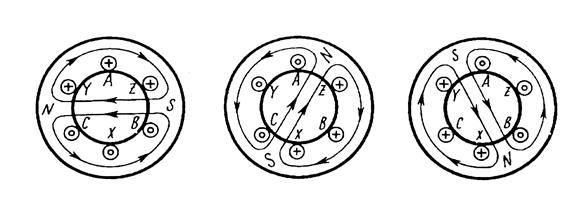
Рис.22.6. Двухполюсное вращающееся магнитное поле
Если система проводников статора симметрична, а угол сдвига фаз между токами соседних проводников одинаков, то амплитуда магнитной индукции ВМП и скорость его вращения постоянны [1].
Вначале рассмотрим случай создания ВМП на примере простейших обмоток статора [3]. Пусть в каждой фазной обмотке одна катушка, а в катушке один виток. В этом случае в паз будет уложено по одному проводнику. Входной проводник фазы А будет уложен в паз А, а выходной проводник – в паз Х. Угол разноса этих проводников по дуге окружности a=180°, т.к. число пар полюсов р=1. Входной проводник по фазе В будет сдвинут относительно А на угол g=120°, а выходной проводник У фазы В будет сдвинут относительно входного на угол a=180°. Аналогичным образом разместятся проводники третьей фазы С и Z (рис. 5.6). Допустим обмотки соединены звездой и питаются трехфазным синусоидальным током.
Если для фазы А принять начальную фазу yi=0, то мгновенные значения токов запишутся следующим образом (рис. 22.7):
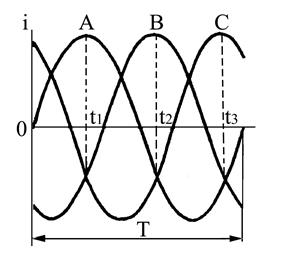
Рис.22.7 Трехфазная система токов
iA=Imsinwt,
iB=Imsin(wt – 120°), ( 22.1)
iC=Imsin(wt –240°)= Imsin(wt + 120°),
Изобразим результирующее магнитное поле статора для моментов времени t1, t2, t3 (рис. 5.7). В момент времени t1 ток в фазе А положительный и максимальный. Условно примем, что такой ток по проводнику А течет от нас и обозначим это крестиком. Ток по проводнику Х будет ориентирован на нас и отразим это окружностью. По фазам В и С в момент времени t1 токи будут отрицательны, поэтому в начале обмоток в пазах В и С токи будут ориентированы на нас (круг), а в конце обмоток (пазы У и Z) – от нас (крестик). Как видно из рис. 22.6, а три проводника имеют одинаковую ориентацию токов, поэтому их магнитные поля объединяются и образуют двухполюсную систему.
Через 1/3 периода трехфазных синусоидальных токов (рис. 22.7) в момент времени t2 максимальным и положительным станет ток в фазе В, а в фазе А ток станет отрицательным. В фазе С ток, как и в момент времени t1,останется отрицательным. Поэтому в проводниках А, Х, В, У токи изменят свое направление, а в проводниках С и Z – не изменят. Отразив это соответствующей символикой, получим результирующее магнитное поле, повернутое на угол 120° по часовой стрелке (рис. 22.6, б). Еще через 1/3 периода, в момент времени t3, положительным и максимальным будет ток в фазе С, а отрицательными токи в фазах А и В. Рассуждая аналогично предыдущим случаям, получим результирующее магнитное поле повернутое еще на 120° (рис. 22.6, в). Таким образом, за период синусоидального тока ВМП совершит один оборот.
Если каждую фазную обмотку выполнить из двух катушек и включить их последовательно, то получим число пар полюсов р=2. Поэтому углы a и g примут следующие значения:
a=  =90°, g=
=90°, g=  =60°.
=60°.
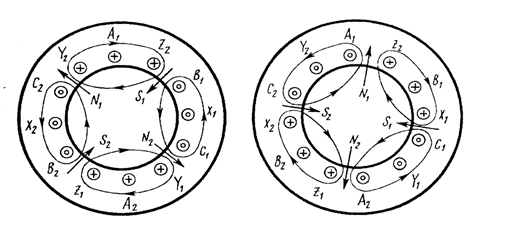
Рис.22.8 Четырехполюсное вращающееся магнитное поле
По фазе А обозначим начало первой катушки А1, конец – Х1, начало второй катушки – А2, конец – Х2. Соответственно также по фазам В: В1,У1, В2, У2 и С: С1, Z1, С2, Z2. Все проводники одной катушки можно уложить в один паз. Таким образом, одна обмотка займет четыре паза, а для трех обмоток необходимо двенадцать пазов (рис. 22.8). Обозначим пазы статора символами катушек, а именно, А1, А2, В1, В2, С1, С2, Х1, Х2, , Z1, Z2, которые равномерно разместятся по окружности через 30°.
Рассуждая аналогично, как и в предыдущем случае получим результирующее четырехполюсное магнитное поле для момента времени
t1 (рис. 22.8, а). Через 1/3 периода синусоиды в момент времени t2 магнитное поле статора повернется на 60° (рис. 22.8, б). Еще через 1/3 периода в момент времени t3 ВМП повернется еще на 60°. За один период синусоидального тока ВМП повернется на 180°.
Если увеличить число катушек в каждой из обмоток и соединить их последовательно, то скорость вращения ВМП будет уменьшаться. Таким образрм, скорость вращения ВМП прямо пропорциональна частоте питающей сети (f) и обратно пропорциональна числу пар полюсов (числу последовательно соединенных катушек каждой обмотки р) и определится формулой
n1=  , об/мин. (5.2)
, об/мин. (5.2)
Максимальная частота вращения ВМП будет при р=1, т.е. n1max=60f об/мин. Для питающей сети с f=50 Гц n1max=3000 об/мин.
Направление вращения ВМП определяется порядком следования фаз. При прямой последовательности фаз А–В–С магнитное поле вращается по часовой стрелке. При обратной последовательности фаз, например В–А–С, – против часовой стрелки. В любом случае ВМП вращается в сторону отставания фазы питающих токов, т.е. от фазы А к фазе В по кратчайшему пути.
Вращение ротора ТАД
В ТАД вращающееся магнитное поле статора пересекает проводники обмоток ротора и по закону электромагнитной индукции наводит в них ЭДС взаимоиндукции, которая определяется по следующей формуле:
E=B×l×n, (22.3)
где B – магнитная индукция поля статора;
l – длина проводника ротора;
n – скорость пересечения проводника ротора магнитными силовыми линиями поля статора.
Допустим, магнитное поле вращается по часовой стрелке, а ротор с проводниками в момент пуска двигателя неподвижен. Для пояснения принципа работы двигателя предположим, что магнитное поле статора неподвижно, а ротор вращается против часовой стрелки (рис. 5.9,а). Учитывая это, по правилу правой руки, определяем, что возникшая ЭДС в проводнике ориентирована на нас (изображена точкой). Если обмотка замкнута, то по ней потечет ток ротора (I2), ориентированный так же, как и ЭДС, т.е. на нас. При этом на проводник будет действовать сила, которая определяется по закону электромагнитной силы - закону Ампера по формуле:
F1=  l× I2, (22.4)
l× I2, (22.4)
где I2 – сила тока, протекающего по проводнику ротора.
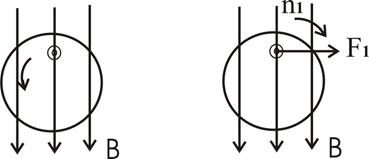
Рис.22.9 Пояснение принципа действия ТАД
Направление этой силы определяется по правилу левой руки. Как видно из рис. 5.9, направление силы F и направление вращения магнитного поля (n1) совпадают. Под действием этой силы появляется момент вращения ротора
Mвр=F1×N2  , (22.5)
, (22.5)
где D – диаметр ротора, N2 – число проводников ротора.
Ротор двигателя начнет вращаться со скоростью n2, которая всегда принципиально меньше скорости вращения магнитного поля статора n1. Если допустить, что n1=n2, то магнитное поле статора не будет пересекать проводники ротора, и в них не будут возникать ЭДС и токи. Это приведет к тому, что исчезнут сила F1 и момент вращения ротора Мвр=0, а частота вращения ротора n2 уменьшится относительно n1. Это приведет опять к тому, что магнитное поле статора начнет пересекать проводники ротора, и появятся e, F1 и Мвр. Ввиду того, что у двигателя принципиально n1>n2, такие электрические машины называются асинхронными (несинхронными) и введен специальный параметр s – скольжение, который определяется по формуле
s=  . (22.6)
. (22.6)
Откуда частота вращения ротора
n2=n1(1-s)=  (1-s). (22.7)
(1-s). (22.7)
Исходя из формулы (22.7) частоту вращения двигателя можно регулировать следующими способами:
1) изменением частоты питающей сети (f), например, с помощью преобразователей частоты;
2) изменением числа пар полюсов (р), что можно осуществить коммутационным методом, переключением катушек фазных обмоток с последовательного соединения на параллельное и наоборот;
3) изменением скольжения (s), что осуществимо в двигателях с фазным ротором (изменением сопротивлений реостатов), а при короткозамкнутом роторе изменением питающего напряжения U1.
Все эти три способа трудно осуществимы и требуют дополнительных затрат. Это является существенным недостатком асинхронных двигателей.
Момент вращения ротора
Как видно из выражений (22.4) и (22.5) момент вращения зависит от многих параметров двигателя. Особый интерес представляет его зависимость от скольжения s, которую можно представить как
Mвр=CMN2×p×U12  , (22.8)
, (22.8)
где CM – конструкционный коэффициент;
N2 – число проводников ротора;
p – число пар полюсов;
U1 – напряжение питающей сети;
 – приведенные активное и реактивное сопротивления проводов ротора, приходящихся на одну фазу;
– приведенные активное и реактивное сопротивления проводов ротора, приходящихся на одну фазу;
r2 ,x2 – активное и реактивное сопротивления одной фазы ротора;
W1,W2 – число проводников статора и ротора, приходящихся на одну фазу.
Из выражения (22.8) видно, что момент вращения зависит от многих факторов, но если зависимость от N2, b, U1 простая, то зависимость от скольжения носит сложный характер. При s=0, Мвр=0, при s®¥ Мвр®0. Следовательно, при изменении 0£s£¥ величина Мвр изменяется от нуля до какогото максимального значения и вновь уменьшается до нуля .
Скольжение, при котором М=Ммах называется критическим (sкр) и его можно определить, взяв первую производную Мвр по s и приравняв нулю. В этом случае приближенно
sкр=  , (22.9)
, (22.9)
т.е. величина скольжения зависит только от сопротивления ротора.
а) б)
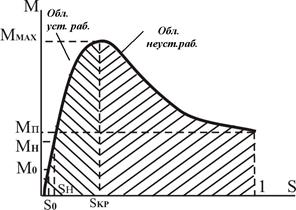
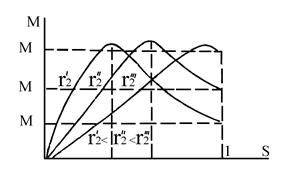
Рис.22.10 Зависимость момента вращения от скольжения:
а – при постоянном r2; б – при различных значениях r2
Максимальное значение момента вращения получается при s=sкр и может быть выражено приближенной формулой
Mm»  . (22.10)
. (22.10)
Зависимость момента вращения от величины скольжения показана на рис. 22.10. На этом рисунке показаны следующие характерные значения
Мm – максимальный момент при sкр;
Мп – пусковой момент при s=1;
Мн – номинальный момент при номинальном скольжении Sн;
М0 – момент холостого хода, соответствующий скольжению на холостом ходе s0.
Из графика зависимости Мвр=f(s) видим, что двигатель имеет две области работы, а именно, область устойчивой и неустойчивой работы. В области устойчивой работы при 0<s<sкр момент вращения двигателя уравновешивается тормозным моментом нагрузки при равномерном вращении. Уравнение моментов для двигателя можно записать как
Мвр= МT=M+Mпот+Мдин,
где M – полезный момент на валу двигателя;
Mпот – момент потерь, обусловленный различными потерями;
Мдин – динамический момент, обусловленный разгоном или торможением двигателя.
Равенство моментов при изменении нагрузки устанавливается автоматически. Например, при увеличении нагрузки на двигатель тормозной момент увеличивается и обороты двигателя (n2) уменьшаются. Это приводит к увеличению скольжения s и увеличению момента вращения до равенства Мвр=МТ. При уменьшении нагрузки Мт увеличивается n2, а это приводит к уменьшению s и уменьшению Мвр опять же до равенства моментов вращения и торможения.
В области неустойчивой работы sкр<s<1 равенство Мвр=МТ не выполняется и двигатель или переходит в область устойчивой работы, или останавливается. При остановке двигателя необходимо выключить питающее напряжение, снять нагрузку и опять включить двигатель в работу. Кратковременные остановки асинхронному двигателю не опасны, т.к. при этом он подобен трансформатору с разомкнутым магнитопроводом, правда в режиме короткого замыкания. Поэтому, если не отключить питающее напряжение, двигатель может выйти из строя от перегрева большими токами.
Отношение Мм/Мн=Км характеризует перегрузочные способности
двигателя и называется кратностью максимального момента. Обычно 1,7<Км<3 при 0,1<sкр<0,2 .
Отношение Мп/Мн=Кп называется кратностью пускового момента. Для двигателя с короткозамкнутым ротором 0,7<Кп<1,8. Отношение пускового тока к номинальному Iп/Iн=К1 называется кратностью пускового тока. Он обычно для двигателя с короткозамкнутым ротором велик и составляется К1=5...7.
Как уже отмечалось sкр зависит от сопротивления ротора (формула 22.9). Зависимость М(s) при различных значениях активного сопротивления ротора r2 показана на рис. 22.10,б. Из рис. 22.10, б следует, что изменяя сопротивление ротора, можно изменять величину момента пуска. Для быстрого разгона двигателя необходимо иметь больше Мп и сопротивление r2.
После разгона двигателя необходимо уменьшить Мп и r2, уменьшая таким образом и номинальное скольжение Sн, при номинальном моменте вращения Мн. Это достигается в фазном роторе выключением в цепи ротора регулирующих реостатов, а в короткозамкнутом – автоматически, применением в обмотке ротора двойного беличьего колеса (двух короткозамкнутых обмоток) или ротора с глубокими пазами, а следовательно, и проводников ротора с большой высотой .
При пуске двигателя s=1 частота ЭДС самоиндукции и тока ротора будет равна частоте питающей сети (f2=f1). При этом ввиду поверхностного эффекта ток проводников ротора вытесняется из глубины на поверхность, т.е. течет по меньшей площади проводников (по наружному беличьему колесу в роторе с двойной беличьей клеткой). Сопротивление проводников ротора при этом увеличивается. По мере разгона ротора частота f2 уменьшается и доходит даже до 1 Гц и ток протекает при этом по всему сечению проводника (по внутреннему белечьему колесу в основном, у которого сопротивление r2 значительно меньше), что уменьшает сопротивление ротора.
Величину момента вращения для любого скольжения s можно вычислить по приближенной формуле
M=  , (22.11)
, (22.11)
где Mm=MH КМ – максимальный момент вращения;
MH=  – номинальный момент вращения;
– номинальный момент вращения;
sкр= sH(КМ+  ) – критическое скольжение;
) – критическое скольжение;
P2H, n2H – номинальные мощность и частота вращения.
Эта формула дает малые погрешности при малых s. При значительном скольжении, когда s>0,5 погрешности велики.
Основные характеристики ТАД
Основными для ТАД являются механическая и рабочие характеристики.
Дата: 2019-04-23, просмотров: 406.