Свойства генераторов постоянного тока зависят от числа и способа подключения обмоток возбуждения или, как говорят, от способа возбуждения генераторов. В зависимости от способа возбуждения различают:
1) генераторы независимого возбуждения;
2) генераторы параллельного возбуждения (ранее шунтовые);
3) генераторы смешанного возбуждения (ранее компаундные).
|
| Рис. 9.12. Схема включения генератора независимого возбуждения |
Главный магнитный поток генератора независимого возбуждения (рис. 9.12) возбуждается расположенной на главных полюсах обмоткой независимого возбуждения H1 — H2. Последняя получает питание от постороннего источника электрической энергии постоянного тока небольшой мощности. Номинальное напряжение обмотки возбуждения выбирают либо равным, либо иногда меньшим номинального напряжения якоря Я1 — Я2 генератора.
Цепь обмотки возбуждения Ш1 — Ш2 генератора параллельного возбуждения (см. рис. 9.16) включают параллельно якорю Я1 — Я2, от которого она и получаст питание. Обмотку возбуждения рассчитывают в этом случае на то же напряжение, что и якорь генератора.
Магнитный поток Ф генератора смешанного возбуждения (см. рис. 9.19) возбуждается расположенными на главных полюсах двумя обмотками: обмоткой параллельного возбужденияШ1 — Ш2 и обмоткой последовательного возбуждения С1 — С2. Последнюю включают либо так, как показано на рис. 9.19, в цепь приемника rп, либо последовательно с якорем. В большинстве случаев обмотки параллельного и последовательного возбуждения включают согласно, т. е. таким образом, чтобы их МДС совпадали по направлению.
Обмотки независимого и параллельного возбуждения существенно отличаются от обмотки последовательного возбуждения в конструктивном отношении. Обмотки независимого и параллельного возбуждения изготовляются из провода относительно малого диаметра, имеют сравнительно большие числа витков и сопротивления. В отличие от этого обмотка последовательного возбуждения изготовляется из провода относительно большого диаметра, имеет небольшое число витков и сопротивление. Например, у машин мощностью от 5 до 100 кВт на напряжение 220 В обмотки параллельного возбуждения имеют соответственно сопротивления порядка 300 — 50 Ом, тогда как обмотки последовательного возбуждения — порядка 0,01 — 0,001 Ом. Площадь поперечного сечения провода для изготовления последовательной обмотки выбирают такого диаметра, чтобы обмотка не перегревалась под действием тока приемника.
В цепи обмоток возбуждения (см. рис. 9.12, 9.16 и 9.19) имеется реостат rр, служащий для изменения тока возбуждения Iв, что необходимо в конечном итоге для регулирования напряжения U на выводах генератора и приемника. Сопротивление нагрузки rп следует рассматривать как некоторое эквивалентное сопротивление, заменяющее группу приемников, получающих питание от генератора.
В некоторых установках находят применение трехобмоточные генераторы, имеющие обмотки независимого, параллельного и последовательного возбуждения. Они имеют особые свойства и характеристики.
КЛАССИФИКАЦИЯ ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
Классификация генераторов постоянного тока производится по способу их возбуждения. Они подразделяются на генераторы с независимым возбуждением и самовозбуждением.
Генераторы первого типа выполняются с электромагнитным и магнитоэлектрическим возбуждением. В генераторах с электромагнитным возбуждением обмотка возбуждения, располагаемая на главных полюсах, подключается к независимому источнику питания (рис. 1, а). Ток в цепи возбуждения Iв может изменяться в широких пределах с помощью переменного резистора Ra. Мощность, потребляемая обмоткой возбуждения, невелика и в номинальном режиме составляет 1-5 % номинальной мощности якоря генератора. Обычно процентное значение мощности возбуждения уменьшается с возрастанием номинальной мощности машины.
Генераторы с магнитоэлектрическим возбуждением возбуждаются постоянными магнитами, из которых изготовляются полюсы машины. С таким видом возбуждения выполняются генераторы относительно небольшой мощности, которые применяются в специальных случаях. Недостатком генераторов с магнитоэлектрическим возбуждением является трудность регулирования напряжения.
У генераторов с самовозбуждением обмотка возбуждения получает питание от собственного якоря. В зависимости от способа ее включения генераторы с самовозбуждением подразделяются на генераторы с параллельным, последовательным и смешанным возбуждением.
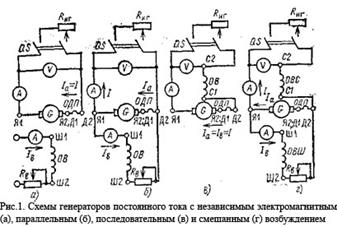
Схема соединения генератора параллельного возбуждения показана на рис. 1,б. Переменный резистор RB дает возможность изменять ток возбуждения Iв и, следовательно, выходное напряжение. Ток якоря Ia у этого генератора равен Ia = I + Iв, где I - ток нагрузки. Ток возбуждения относительно мал и для номинального режима составляет 1-5 % номинального тока машины.
У генератора последовательного возбуждения обмотка возбуждения соединяется последовательно с якорем и ее ток возбуждения равен току якоря и току нагрузки: Iв = Ia =I (рис. 1, в).
У генераторов смешанного возбуждения (рис. 1, г) на полюсах размещаются две обмотки. Одна из них, имеющая большое число витков и выполненная из проводников относительно небольшого сечения, включается параллельно с якорем, а другая обмотка с малым числом витков из проводников большого сечения включается последовательно с якорем. Ток якоря такого генератора равен Ia = I + Iв.
У этих генераторов параллельная и последовательная обмотки могут быть включены согласно (МДС этих обмоток направлены одинаково) и встречно (их МДС направлены противоположно). В зависимости от этого различаются генераторы смешанного согласного включения и генераторы смешанного встречного включения. Обычно в генераторах смешанного возбуждения основная часть МДС возбуждения создается параллельной обмоткой. Генераторы параллельного, последовательного и смешанного возбуждения иногда называют соответственно генераторами шунтового, сериесного и компаундного возбуждения.
Согласно ГОСТ 183-74 для машин постоянного тока принято следующее обозначение выводов обмоток: обмотки якоря Я1-Я2,параллельной обмотки возбуждения Ш1-Ш2, последовательной обмотки возбуждения С1-С2, обмотки дополнительных полюсов Д1-Д2, компенсационной обмотки К1-К2. Цифра 1 обозначает начало, а 2 - конец обмотки.
Основные обозначения приведены в таблице.
| Наименование обмотки | Обозначение выводов | |
| Начало | Конец | |
| Обмотка якоря | A1 | A2 |
| Обмотка добавочного полюса | B1 | B2 |
| Обмотка компенсационная | C1 | C2 |
| Последовательная обмотка возбуждения | D1 | D2 |
| Параллельная обмотка возбуждения | E1 | E2 |
| Независимая обмотка возбуждения | F1 | F2 |
В зависимости от способа питания обмотки возбуждения для современных генераторов постоянного тока применяется независимое возбуждение магнитного потока и самовозбуждение.
 При независимом возбуждении (рис. 154, а) обмотка возбуждения соединяется с вспомогательным источником энергии постоянного тока. Для регулирования тока возбуждения Iв в цепи обмотки включается сопротивление rp. При таком возбуждении ток Iв не зависит от тока в якоре Iя.
При независимом возбуждении (рис. 154, а) обмотка возбуждения соединяется с вспомогательным источником энергии постоянного тока. Для регулирования тока возбуждения Iв в цепи обмотки включается сопротивление rp. При таком возбуждении ток Iв не зависит от тока в якоре Iя.
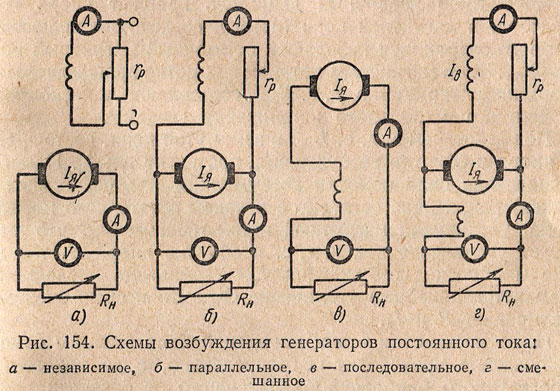
Недостатком генераторов независимого возбуждения является потребность в дополнительном источнике энергии. Несмотря на то, что этот источник обычно имеет малую мощность (несколько процентов мощности генераторов), необходимость в нем является большим неудобством и поэтому генераторы независимого возбуждения находят ограниченное применение в специальных установках (ГД) и в машинах высоких напряжений, у которых питание обмотки возбуждения от цепи якоря недопустимо по конструктивным соображениям.
Генераторы с самовозбуждением имеют более широкое применение. В зависимости от соединения обмотки возбуждения они могут быть параллельного (рис. 154, б), последовательного (рис. 154, в) и смешанного (рис. 154, г) возбуждения.
У генераторов параллельного возбуждения ток Iв мал (несколько процентов номинального тока якоря), а обмотка возбуждения имеет большое число витков. При последовательном возбуждении током возбуждения служит ток якоря и обмотка возбуждения имеет малое число витков.
При смешанном возбуждении на полюсах генератора помещается две обмотки возбуждения — параллельная и последовательная.
Процесс самовозбуждения генераторов постоянного тока протекает одинаково при любой схеме возбуждения. Рассмотрим процесс самовозбуждения генератора параллельного возбуждения, получившего наиболее широкое применение.
Какой-либо первичный двигатель вращает якорь генератора, в магнитной цепи (ярмо и сердечники полюсов) которого сохранился небольшой остаточный магнитный поток Φост. Этим магнитным потоком в обмотке вращающегося якоря индуктируется э. д. с. Еост, составляющая несколько процентов номинального напряжения машины.
Под действием э. д. с. Еост в замкнутой цепи, состоящей из якоря и обмотки возбуждения, протекает ток Iв. Намагничивающая сила обмотки возбуждения Iвωв (ωв — число витков) направлена согласно с потоком остаточного магнетизма, увеличивая магнитный поток машины Φm, что вызывает увеличение как э. д. с. в обмотке якоря Е, так и тока в обмотке возбуждения Iв. Увеличение последнего вызывает дальнейшее увеличение Φm, что в свою очередь увеличивает Е и Iв.
Из-за насыщения стали магнитной цепи машины самовозбуждение происходит не беспредельно, а до какого-то определенного напряжения, зависящего от скорости вращения якоря машины и сопротивления цепи обмотки возбуждения. При насыщении стали магнитной цепи увеличение магнитного потока замедляется и процесс самовозбуждения заканчивается. Увеличение сопротивления в цепи обмотки возбуждения уменьшает как ток в ней, так и магнитный поток, возбуждаемый этим током. Поэтому уменьшается э. д. с. и напряжение, до которого возбуждается генератор.
Изменение скорости вращения якоря генератора вызывает изменение э. д. с., которая пропорциональна скорости, вследствие чего изменяется и напряжение, до которого возбуждается генератор.
Самовозбуждение генератора происходит лишь при определенных условиях, которые сводятся к следующим.
1. Наличие потока остаточного магнетизма. При отсутствии этого потока не создается э. д. с. Еост, под действием которой в обмотке возбуждения начинает протекать ток, так что возбуждение генератора будет невозможным. Если машина размагничена и не имеет остаточного намагничивания, то по обмотке возбуждения надо пропустить постоянный ток от какого-либо постороннего источника электрической энергии. После отключения обмотки возбуждения в машине сохранится остаточный магнитный поток.
2. Обмотка возбуждения должна быть включена так, чтобы намагничивающая сила этой обмотки увеличивала поток остаточного магнетизма.
При встречном включении обмотки возбуждения ее намагничивающая сила будет уменьшать остаточный магнитный поток и при длительной работе может полностью размагнитить машину. В этом случае в обмотке возбуждения необходимо изменить направление тока, т. е. поменять местами провода, подходящие к ее зажимам.
3. Сопротивление цепи обмотки возбуждения должно быть не чрезмерно большим; при очень большом сопротивлении цепи возбуждения самовозбуждение генератора невозможно.
4. Сопротивление внешней нагрузки должно быть относительно велико, так как при малом сопротивлении ток возбуждения будет также мал и самовозбуждения происходить не будет.
36.Классификация электропривода. Особенности выбора мощности двигателя по его нагреву и перегрузочной способности при его работе с постоянной и переменной нагрузкой (метод эквивалентного тока, момента и мощности).
Классификация ЭП
1) по количеству и связи исполнительных рабочих органов
- индивидуальный, в котором рабочий исполнительный орган (РИО) приводится одним самостоятельным двигателем
- групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ
-взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, нагрузок или положения исполнительных органов РМ
-многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал
-электрический, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП
2) по типу и задаче управления
- автоматизированный – авторегулирование параметров и величин
-программно-управляемый – посредством управляющей вычислительной машины в соответствии с заданной программой
- следящий – автоматически отрабатывающий перемещение ИО РМ с заданной точностью
- позиционный – автоматически регулирующий положение ИО РМ
- адаптивный – автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы
3) по характеру движения
- с вращательным движением
- линейный ЭП с линейным двигателем
- дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения
4) по наличию и характеру передаточного устройства
-редукторный ЭП с редуктором или мультипликатором
- электрогидравлический с передаточным гидравлическим устройством
- магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости
5) по роду тока
- постоянного
-переменного
6) по степени важности выполняемых операций
-главный
-вспомогательный
Метод эквивалентного тока
В основу этого метода положено допущение, что при переменной нагрузке двигателя его средние потери должны быть равны потерям при продолжительной (номинальной) нагрузке. Как известно, мощность потерь двигателя складывается из постоянных Рпост и переменных Рпер мощностей. Мощность постоянных потерь равна сумме мощности потерь на трение в магнитопроводе, на возбуждение у синхронных двигателей и двигателей с параллельным возбуждением. Мощность переменных потерь можно считать пропорциональной квадрату рабочего тока двигателя и сопротивлению соответствующей обмотки r, причем приближенно можно считать последнее постоянным. Если ток изменяется в течение отдельных промежутков времени, то за все рабочее время суммарные потери энергии в двигателе будут
(Рпост + rI12)t1 + (Рпост + rI22)t2 +… + (Рпост + rIk2)tk + … + (Рпост + rIn2)tn
При эквивалентной неизменной нагрузке током за то же время потери энергии двигателе должны быть равны (Рпост + rIэк2)Т. Метод эквивалентного тока можно применять лишь при постоянстве мощности потерь в магнитопроводе и на трение, а также сопротивлений обмоток в течение всего рабочего времени.
Метод эквивалентного момента
У всех ЭД Мвр пропорционален произведению тока и потока. У двигателей переменного тока можно приближенно считать постоянным коэффициент мощности. Наконец, магнитный поток, можно считать практически постоянным у всех двигателей, кроме двигателей с последовательным и смешанным возбуждением. При таких упрощениях Мвр=kвр*I, где kвр – постоянная величина, отсюда следует:
 По эквивалентному моменту и номинальной угловой скорости двигателя wном рассчитывается номинальная мощность двигателя Рном=Мвр.эк. wном.
По эквивалентному моменту и номинальной угловой скорости двигателя wном рассчитывается номинальная мощность двигателя Рном=Мвр.эк. wном.
Выбрав номинальную мощность двигателя на основании расчета по методу эквивалентного тока или эквивалентного момента, необходимо затем проверить, достаточен ли максимальный момент Mmaх двигателя для того, чтобы удовлетворить требованиям кратковременных перегрузок данного привода; иными словами, должно быть выполнено условие: коэффициент перегрузки двигателя ƛном должен быть больше отношения максимального момента Mmax нагрузки к номинальному моменту двигателя, т.е. 
37.Аппаратура и схема управления электроприводом.
Управление электроприводом (ЭП) – это принудительное изменение его состояния, осуществляемое с помощью электроаппаратуры. К аппаратуре ЭП относят контакторы, реле, контроллеры, различные командоаппараты (кнопки, пульты управления), тормозные электромагниты, резисторы, а также комплексные устройства (реостаты, пускатели, магнитные станции, магнитные усилители, различные блоки на полупроводниках и др.)
Контакторы – их основным назначением является частая коммутация электрических цепей.
ЭМ и электротепловые реле – в основном выполняют защитные функции (если ток якоря превышает допустимую величину, якорь притягивается, преодолевая силу сопротивления пружины и размыкаются контакты, т.е. аппарат отключается)
Контроллеры – применяют для управления палубными механизмами(происходит непосредственное замыкание силовых цепей ЭД). Контакты контроллера должны быть достаточно мощными, т.к. через них проходит главный ток ЭП.
Командоконтроллерыпо конструкции подобны силовым, но они обычно меньше по размерам и их контакты рассчитаны на более слабые токи. (контакты командоконтроллера замыкают и размыкают (коммутируют) цепи катушек отдельно установленных контакторов, контакторы своими контактами коммутируют цепи ЭД).
Тормозные электромагниты – растормозить ЭП при подаче питания на катушку электромагнита.
38.Классификация и область применения электронных приборов.
Классификация электронных приборов
1) по принципу работы
- электронные – поток е движется между электродами, находящимися в вакууме, т.е. в среде столь разреженного газа, что движущиеся е не испытывают столкновений с частицами газа
- газоразрядные – движение е в межэлектродном пространстве происходит в условиях столкновения их с частицами газа, что при определенных условиях приводит к ионизации газа, резко изменяющего свойства прибора
- электрохимические – принципдействия основан на явлениях, связанных с происхождением электрического тока в жидких телах с ионной проводимостью
- полупроводниковые – принцип действия основан на электронных явлениях в веществах, имеющих кристаллическое строение, для которого характерно закономерное и упорядоченное расположение атомов в пространстве
2) по функциональному назначению
- электропреобразовательные – энергия одного вида преобразуется в энергию другого вида (усилительные, выпрямительные и т.д.)
- электросветительные – энергия тока преобразуется вэнергию оптического излучения (лазеры, светоизлучающие диоды и др.)
- фотоэлектрические – энергия светового излучения преобразуется в электрическую энергию (фотоэлементы, фотодиоды и др.)
Область применения
Электронные приборы находят применение в радиотехнике, автоматике, связи, вычислительной технике, астрономии, физике, медицине и т.д.
Дата: 2019-03-05, просмотров: 874.