Асинхронные двигателя наиболее просты в изготовлении и наиболее дешевые, поэтому применение их в регулируемых электроприводах весьма перспективно. Однако до сих пор не найдено дешевой и экономичной системы регулирования частоты вращения асинхронных двигателей, хотя известны десятки способов регулирования их частот вращения [2].
Частоту вращения ротора можно выразить формулой
 (11.1)
(11.1)
где n1 = n0 – синхронная частота вращения магнитного поля статора;
f1 – частота переменного тока в сети; P – число пар полюсов; S – скольжение.
Из выражения (11.1) следует, что регулировать частоту вращения ротора n, можно:
1) изменением частоты вращения магнитного потока n1;
2) Скольжением.
В свою очередь изменять частоту вращения магнитного поля можно: за счет изменения частоты тока питающего напряжения или за счет изменения числа пар полюсов.
Для регулирования частоты вращения изменением частоты тока в статоре (частотное регулирование) необходим источник питания. Однако источник питания с регулируемой частотой тока увеличивает габариты и удорожает установку.
Регулирование частоты вращения путем переключения числа полюсов ступенчатое. Следует иметь в виду, что ступени частоты вращения при частоте тока f1 = 50 Гц и p = 1 и 2 соответственно 3000 и 1500 об/мин, а при
p = 5 и 6 – 600 и 500 об/мин. То есть при большем числе полюсов разница между синхронными частотами вращения уменьшается, но увеличиваются габариты машины.
Наиболее простым способом, обеспечивающим плавное регулирование частоты вращения асинхронных двигателей, является изменение скольжения. Принципиальным недостатком этого способа регулирования частоты вращения является низкий кпд, так как потери в роторе пропорциональны скольжению, Pэ2 = Pэм S. И какие бы ни предполагались варианты схем изменения скольжения, а их существует десятки [2], энергия будет тем больше преобразоваться в тепло, чем шире диапазон изменения скольжения, следовательно, и частоты вращения.
Наиболее распространенные способы регулирования скольжения – это введение в цепь ротора сопротивления, изменения напряжения, искажение симметрии подводимых напряжений и др.
11.2. Регулирование частоты вращения изменением частоты тока в обмотках статора
В качестве источников питания с регулируемой частотой могут применяться электромагнитные (синхронные генераторы с переменной частотой вращения ротора) или полупроводниковые преобразователи. Чтобы регулировать частоту вращения асинхронного двигателя, достаточно изменять частоту тока f1. Но с изменением частоты f1 будет изменяться величина магнитного потока при U1 = const, как это следует из формулы (11.2)
 (11.2)
(11.2)
а также максимальный момент. Поэтому для сохранения неизменной перегрузочной способности необходимо одновременно с изменением частоты f1 изменять и напряжение U1, что вытекает из закона изменения момента нагрузки
 (11.3)
(11.3)
где U1 и M – напряжение и момент при частоте  ;
;  и
и  – напряжение и момент при частоте
– напряжение и момент при частоте  .
.
Для сохранения M = M1 = const подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты тока:
 . (11.4)
. (11.4)
При этом мощность двигателя увеличивается пропорционально нарастанию частоты вращения. И если регулирование производится при условии постоянства мощности двигателя (Pэм = M∙ω = const), то подводимое напряжение следует изменять в соответствии с законом
 (11.5)
(11.5)
Частотное регулирование до последнего времени применялось в основном для одновременного регулирования группы двигателей, работающих в одинаковых условиях (рольгановые, транспортерные двигатели). Но благодаря развитию силовой полупроводниковой техники в последние годы созданы устройства частотного регулирования, применяемые для регулирования частоты вращения одиночных двигателей. Следует иметь ввиду, что введение в энергосистему большего количества полупроводниковых элементов (которые являются нелинейными элементами) приводит к появлению высших гармоник в сети и искажению синусоидальности напряжений. Ухудшение качества электроэнергии приводит к потерям в энергосистеме.
11.3. Регулирование частоты вращения изменением числа полюсов обмотки статора
Для изменения числа полюсов на статоре в одни и те же пазы можно уложить несколько обмоток, рассчитанных на разное число полюсов.
В зависимости от необходимой частоты вращения включается та или другая обмотка, что снижает использование материалов.
Можно иметь одну обмотку с выводами, позволяющими переключать обмотку на два различных числа пар полюсов. Двигатели с изменением числа пар полюсов называют многоскоростными.
Промышленностью выпускаются двигатели на две, три и четыре скорости. Двухскоростные двигатели изготовляются с одной обмоткой и переключением полюсов P2 : P1 = 2:1. Трехскоростные двигатели имеют две обмотки, причем одну – с переключением P2 : P1 = 2:1, вторую без переключения. Четырехскоростные двигатели имеют две обмотки с переключением у обеих P2 : P1 = 2:1.
Возможность переключения числа пар полюсов путем изменения схемы обмотки на примере одной фазы иллюстрирует рис. 11.1.
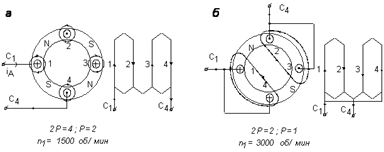
Рис. 11.1. Переключение числа полюсов при различном
соединении секций: а – P = 2; б – P = 1
На рис. 11.2, а дана схема включения обмоток статора по схеме звезда, а на рис. 11.2, б показано переключение обмоток статора на схему двойной звезды, а на рис. 11.2, в – на схему треугольника.
При переключении со звезды на двойную звезду частота вращения изменяется в 2 раза (увеличивается), мощность также увеличивается в 2 раза, а момент остается одним и тем же.
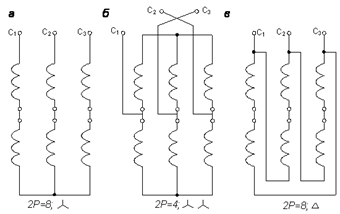
Рис. 11.2. Включение обмоток по схеме: а – звезды;
б – двойной звезды; в – треугольника
Схемы рис. 11.2, в, б при переключении чисел полюсов ∆/YY обеспечивается увеличение скорости в 2 раза и снижение момента в 2 раза, а мощность при таком регулировании остается неизменной
 .
.
Многоскоростные двигатели выполняются с короткозамкнутым ротором, поэтому переключение числа пар полюсов производится только на статоре.
11.4. Регулирование частоты вращения изменением активного сопротивления в цепи ротора
Механические характеристики асинхронного двигателя с фазным ротором, построенные для различных значений активного сопротивления цепи ротора (см. рис. 10.4) показывают, что с увеличением активного сопротивления ротора возрастает скольжение, соответствующее заданному моменту сопротивления Mc.
Согласно закону движения установившееся значение частоты вращения определяется условием M = Mc, т. е. электромагнитный момент двигателя М должен уравновешиваться направленным ему навстречу моментом нагрузки Mc.
Когда введено все сопротивление, разгон осуществляется по кривой I (см. рис. 10.4), так как MI >Mc, до условия MI = Mc. Здесь будет первая установившаяся частота вращения nуст = n1 (1–SI), далее ползунок реостата переводим в положение II. То есть регулирование скольжением осуществляется с помощью реостата ПР в цепи ротора по схеме реостатного пуска, но только реостат должен быть рассчитан на длительную работу. Во втором положении ползунка реостата выводится часть сопротивлений и осуществляется переход на характеристику II, разгон продолжается до условия MI = Mc, тогда
 .
.
При переходе на III механическую характеристику, когда обмотки фазного ротора замкнуты накоротко, разгон осуществляется по естественной характеристике до Sуст. Как видно из рис. 10.4, б установившаяся частота вращения определяется величиной Mc; если Mc ≈ M0, то регулирование скольжения практически не происходит, так как n ≈ n0. Включение резистора в обмотку ротора приводит к тому, что частично потери в роторной цепи выделяются в резисторе. Выведение потерь из машины дает возможность уменьшить габариты машины. Для уменьшения потерь во вторичную цепь ротора вместо сопротивлений вводят добавочную эдс.
11.5. Влияние подводимого напряжения на регулирование частоты вращения
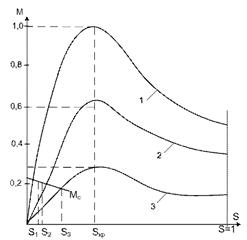
При изменении напряжения, подводимого к статору машины, механические характеристики изменяются так, как показано на рис. 11.3.
При изменении напряжения, подводимого к обмоткам статора максимальный момент изменяется пропорционально квадрату напряжения, а критическое скольжение остается неизменным. При уменьшении U1 изменяется скольжение от S1 и S3.
Дата: 2019-03-05, просмотров: 454.