23.Потери и КПД в трансформаторе.
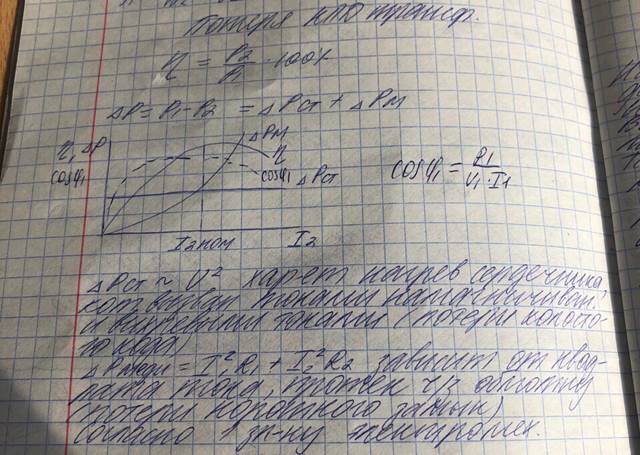
Мощность потерь в трансформаторе равна сумме мощностей потерь в магнитопроводеРс и в проводах обмоток Рпр. Потери в проводах обмоток называют переменными потерями трансформатора, потери в магнитопроводе – постоянными потерями.
КПД трансформатора определяется как отношение активной мощности переменного тока, потребляемой нагрузкой к активной мощности, потребляемой от электросети.
ŋ= P2/P2+Pc+Pпр= U2I2cosµ2/U2I2cosµ2 + Рс + Рпр
24.Возбуждение вращающегося магнитного потока 3-фазной системы токов в асинхронном двигателе.
Путем последовательного изменения направления постоянного тока в 2 катушках, оси которых образуют угол 900, можно заставить магнитную стрелку постепенно поворачиваться в пределах 3600. Но переключаемый постоянный ток легко заменить переменным, который сам будет изменять направление. При этом необходимо, чтобы изменения направления тока в 2 катушках происходили не одновременно. Этому требованию удовлетворяют 2 переменны тока, сдвинутые по фазе один относительно другого на четверть периода. Так как токи сдвинуты по фазе на четверть периода, то магнитные индукции в полях, ими возбуждаемых, должны быть также сдвинуты по фазе одна по отношению к другой. Этому условию сдвига удовлетворяют синусоида и косинусоида.
Если мгновенное значение индукции в поле 1 катушки: В1=ВТcoswt, то мгновенное значение индукции в поле 2 катушки должно быть: B2=BTsinwt, здесь ВТ – амплитуда магнитной индукции, одинаковая в обеих катушках. Закладываясь в середине устройства, 2 переменных магнитных поля образуют результирующее магнитное поле, индукция в котором будет: Врез=В12+В22, т.к. направление полей катушек взаимно перпендикулярны. Подставив выражение Врез в значения В1 и В2 как функции времени, получим:
Врез=ВТVsin2wt + cos2wt= BT следовательно, результирующее магнитное поле устройства Врез постоянно по величине, хотя оно и складывается из 2 переменных магнитных полей. Определим теперь положение результирующего поля в пространстве. По отношению к оси 1 катушки это поле образует угол, определяемый условием: tgα= B2/B1=sinwt/coswt=tgwt, на основание чего α=wt, т.е. угол, образуемый осью результирующего поля по отношению к оси катушки, равномерно изменяется и за время одного периода переменного тока:
α=wt=2w/T*T=2w, т.е. поле делает полный оборот. В секунду поле делает fоборотов, а число оборот поля в минуту n=f*60. Т.о. при стандартной промышленной частоте число оборотов составит n=50*60=3000 об/мин;
Для возбуждения его нужна 2-фазная система переменных токов. Такая система требует для передачи энергии не менее 3 проводов. Векторы двух линейных токов Iл рассматриваемой системы образуют угол 900, поэтому вектор тока в общем проводе I0определяется как гипотенуза равнобедренного треугольника. На основании чего ток
I0= w2Iл
Значительно выгоднее получать вращающееся магнитное поле посредством 3-фазной системы токов. Для получения 3-фазного вращающегося поля нужны 3 одинаковые катушки, оси которых образуют углы по 1200. Это поле вращается в плоскости осей катушек с угловой скоростью w, как и выше рассмотренное 2-фазное поле. Сопоставим теперь условия 2-фазного и 3-фазного вращающихся полей. При 2-фазной системе необходимы два провода, рассчитанные на линейный ток и третий провод, рассчитанный на силу ток w2Iл. Магнитная индукция во вращающемся 2-фазном поле равна В1. При 3-фазной системе необходимы 3 одинаковых провода, рассчитанные каждый на линейный ток, а индукция во вращающемся поле имеет величину 1,5ВТ. Следовательно для 2-фазной системы нужно большее сечение проводов, а вращающееся поле создается в 1,5 раза слабее, чем в 3-фазной системе. По этим причинам 2-фазный ток, изобретенный раньше
3-фазного в настоящее время применяется только в некоторых специальных устройствах.
25.Устройство и принцип 3-фазного асинхронного двигателя. Основные параметры.
3-фазная асинхронная машина состоит из 2 главных частей: неподвижного статора и подвижного ротора.
Статор состоит из нескольких тонких пластин из алюминия или чугуна. Их спрессовывают друг с другом, чтобы сформировать полый цилиндр сердечника с пазами. В них укладывают изолированные провода. Каждая группа обмоток вместе с окружающим их сердечником после подачи на нее переменного тока образует электромагнит. Число полюсов АД зависит от внутреннего соединения обмоток статора. Оно сделано таким образом, что при подключении ИП образуется вращающееся магнитное поле.
Ротор состоит из нескольких тонких стальных пластин с равномерно расположенными по периферии стержнями из алюминия или меди. В наиболее популярном его типе – короткозамкнутом или «беличьей клетке» - стержни на концах механически и электрически соединены с помощью колец. Почти в 90% АД используется такая конструкция, так как она проста и надежна. Ротор состоит из цилиндрического пластинчатого сердечника с аксиально размещенными параллельными пазами для установки проводников. В каждый паз укладывается стержень из меди, алюминия или сплава. Они замкнуты накоротко с обеих сторон с помощью концевых колец. Пазы ротора не совсем параллельны валу. Их делают с небольшим перекосом по 2 причинам. Первая заключается в обеспечении плавной работы АД за счет уменьшения магнитного шума и гармоник. Вторая заключается в снижении вероятности застопоривания ротора: его зубцы зацепляются за прорези статора за счет прямого магнитного притяжения между ними. Это происходит, когда их число совпадает. Ротор устанавливается на валу с помощью подшипников на каждом конце. Одна часть обычно выступает больше, чем другая, для приведения в движение нагрузки. В некоторых двигателях на нерабочем конце вала крепятся датчики скорости или положения.
Между статором и ротором имеется воздушный зазор. Через него передается энергия. Сгенерированный крутящий момент заставляет ротор и нагрузку вращаться. Вне зависимости от типа используемого ротора, устройство и принцип действия АД остаются неизменным. Как правило, АД классифицируются по числу обмоток статора. Различают одно- и трехфазные электрические моторы.
Принцип действия АД
Когда двигатель подключается к ИП, то по основной обмотке начинает течь переменный ток. Он генерирует пульсирующее магнитное поле. Из-за индукции ротор находится под напряжением. Поскольку главное магнитное поле пульсирует, крутящий момент, необходимый для вращения двигателя, не генерируется. Ротор начинает вибрировать, а не вращаться. Поэтому для однофазного АД требуется наличие пускового механизма. Он может обеспечить начальный толчок, заставляющий вал двигаться. Стартовый механизм однофазного АД состоит в основном из дополнительной обмотки статора. Ей могут сопутствовать последовательный конденсатор или центробежный выключатель. При подаче напряжения питания ток в основной обмотке отстает от напряжения из-за ее сопротивления. В то же время электричество с стартовой обмотке отстает или опережает напряжение питания в зависимости от импеданса пускового механизма. Взаимодействие между магнитными полями, генерируемыми основной обмоткой и стартовой схемой, создает результирующее магнитное поле. Оно вращается в одном направлении. Ротор начинает поворачиваться в направлении результирующего магнитного поля.
После того как скорость мотора достигнет около 75% от номинальной, центробежный выключатель отключает пусковую обмотку. Далее двигатель может поддерживать достаточный крутящий момент, чтобы действовать самостоятельно. За исключением моторов со специальным стартовым конденсатором, все 1-фазные электродвигатели, как правило, используются для создания мощности, не превышающей 500 Вт.
Основные параметры
Номинальные Uи I; крутящий момент Мкр=CмФI2cos (E2,I2), где Ф – магнитный поток, I2-ток ротора; S=n1-n2/n1 – скольжение, где n1-скорость поля,n2-скорость ротора;
КПД ŋ=Р2/Р1 и коэффициент мощности cosµ= P1/UI1
Дата: 2019-03-05, просмотров: 420.