Для управления боковым движением внутренним является
контур управления и стабилизации угла крепа. Расчет передаточных чисел контура выполним. Для указанных выше больших значений постоянной времени изодромного звена в обратной связи расчетными формулами, дающими близкий к апериодическому переходный процесс по углу крена, являются:

Расшифровка входящих в эти формулы величин:
- tрег [сек] желаемое время регулирования по углу крена, обычно им задаются равным примерно 4...6 сек.
Аналогично случаю управления продольным движением здесь также имеют место постоянные и квазипостоянные величины, входящие в расчетные формулы. Так достаточной для практики точностью можно принять mxωx=-0.49, mxδx =-0.12 и Ix=2.
Величины S=1.4м2 и l=2.64м постоянные.
В этом случае для tрег=5c имеем:

Расчетные формулы для передаточных чисел канала крена для случая tрег = 5сек приобретут вид:
Поскольку величина скоростного напора q исчисляется сотнями, то очевидно, что передаточные числа приобретают очень малые значения - это вызывает сомнения в достоверности результатов поскольку говорит о существенно завышенной эффективности элеронов. На работе ПК с такими передаточными числами окажут существенное и губительное влияние нелинейности проводки управления и сервопривода ПК.
Стабилизация и управление углом курса, которое предлагается выполнять по приведенному выше алгоритму перекрестного управления, осуществляется при следующих значениях параметров алгоритма:
Интегральный блок датчиков (ИБД)
На базе твердотельных датчиков угловых скоростей (ДУС) и датчиков линейных ускорений (ДЛУ) целесообразно объединение датчиков в единый измерительный блок, где сигналы обрабатываются цифровым вычислителем и в последовательном коде выдаются в основной вычислитель системы управления. Так сделано, например, в интегральном блоке датчиков.
В вычислитель блока датчиков можно включить функцию приема и обработки аналоговых сигналов, их преобразование в цифровой код и передачу в цифровом виде потребителям.
ИБД обеспечивает измерение угловых скоростей и линейного ускорения в связанных осях самолета, преобразование этих и других сигналов датчиков, входящих в систему, и выдачу выходных сигналов в виде последовательного цифрового кода.
Интегральный блок датчиков разработан на основе волоконно-оптических датчиков угловой скорости типа ДУСв-5 и твердотельных акселерометров типа АТ1112 и предназначен для применения в системах дистанционного или автоматического управления. Упрощенная структурная схема системы автоматического управления представлена на рисунке 2:





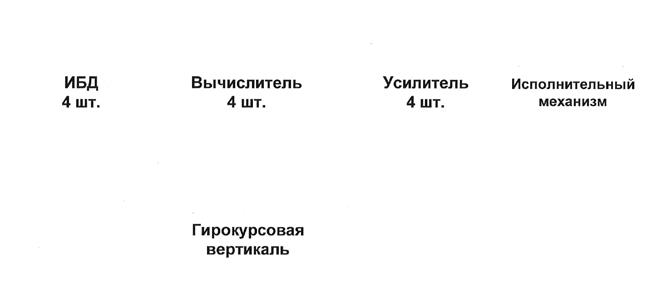
Рисунок 2. Упрощенная структурная схема САУ.
ИБД принимает аналоговые сигналы с датчиков первичной информации, которые затем обрабатываются вычислителем, входящим в состав ИБД, и выдает сигналы в цифровом последовательном коде на центральный вычислитель системы. После обработки и перевода сигнала в аналоговый, информация с центрального вычислителя поступает на усилитель, который в свою очередь преобразует сигнал и предает его на управляющие органы.
Функциональная схема представлена на рисунке 3:

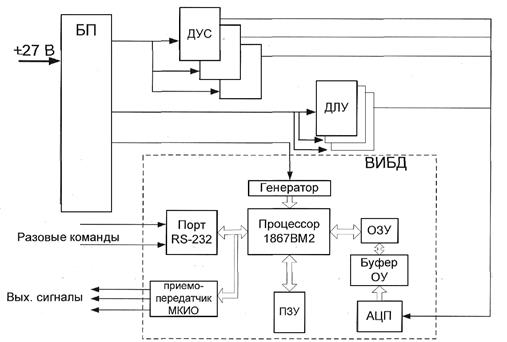
Рисунок 3. Функциональная схема ИБД.
Использование волоконно-оптического датчика в составе ДУСа в ИБД определяет уникальные свойства прибора:
- потенциально высокая чувствительность (0.01 град/сек и менее);
- малые габариты и масса конструкции, благодаря возможности создания ВОГ на интегрально-оптических схемах;
- невысокая стоимость производства и относительная простота технологии по сравнению с роторными гироскопами;
- низкое потребление энергии;
- большой динамический диапазон измеряемых угловых скоростей;
- отсутствие вращающихся механических элементов (роторов) и подшипников, что повышает надежность;
- практически мгновенная готовность работы (не затрачивается время на раскрутку ротора);
- низкая чувствительность к линейным ускорениям;
- высокая помехоустойчивость;
Одним из наиболее важным свойством ИБД является его высокая надежность (безотказность). Аналогичное устройство блок гироскопичекских датчиков имеет гарантийную наработку 6000 ч, в то время как у ИБД средняя наработка на отказ и повреждение составляет 10000 ч.
В состав ИБД входят:
- три волоконно-оптических датчика ДУСв-5;
- три твердотельных акселерометра АТ1112;
- цифровой вычислитель;
- блок питания;
- четыре датчика внутренней температуры.
Расположение датчиков в блоке ИБД представлено на рисунке 4:
|
|



|
|

|
|
|
Рисунок 4. Расположение датчиков внутри ИБД.
Внешний вид и габаритные размеры представлены на рисунке 5:
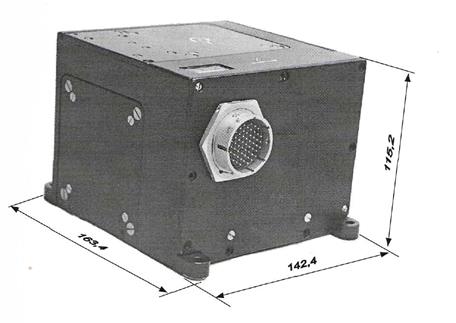
Рисунок 5. Внешний вид ИБД.
Крепление датчиков осуществляется 4 винтами М-4 к крышке корпуса по соответствующим координатным осям X, У, Z. Блок питания БПП и вычислитель ВИБД крепятся к корпусу 9 винтами М-4.
Точность установки датчиков (привязки осей к корпусу) должна составлять не более ±15'.
На корпус ИБД необходимо нанести гравировку с указанием названия изделия, его номер, а так же направление координатных осей.
Корпус необходимо выполнить с анодирующим покрытием, которое защищает от коррозии.
Вес интегрального блока датчиков не должен превышать 2,6 кг.
ИБД должен быть стойким к внешним воздействиям, представленным в таблице 1:
Таблица 1
| Внешние воздействующие факторы | Характеристики воздействующих факторов | Максимальные значения величины воздействующего фактора, степени жесткости |
| Акустический шум | Диапазон частот, Гц Уровень звукового давления (относительно 2∙10-5 Па) дБ | 50-10000 130 |
| Механический удар одиночного действия (для узлов крепления) | Пиковое ударное ускорение, м/с2 (g) Длительность действия ударного ускорения, мс | 147(15) 15 |
| Линейное ускорение | Значение линейного ускорения, м/с2(g). | 98(10)- 147 (15) - (для узлов крепления) |
| Атмосферное пониженное давление | Значение при эксплуатации, кПа (мм рт. ст.) | 5,5 (41) |
| Пониженная температура среды | Рабочая, °С Предельная, °С | -40 -60 |
| Повышенная температура среды | Рабочая, °С Рабочая, кратковременная,°С Предельная, °С | 60 70 85 |
| Повышенная влажность | Влажность относительная, предельная при температуре 35°С, % | 98 |
| Атмосферные конденсированные осадки (роса и внутреннее обледенение) | Пониженная температура, °С. Относительная влажность при температуре 35°С, не менее, % Пониженное давление, кПа (мм рт.ст.), не менее | -30 95 22,67(170) |
| Статическая пыль, (песок) | Скорость циркуляции, м/с, Концентрация, г/м3 | 0,5-1,0 3 |
| Соляной (морской) туман | Водность, г/м3 Температура, °С Дисперсность не более, мкм | 2-3 35 20 |
| Плесневые грибы | Влажность повышенная, % Температура, °С | 95-98 29 |
Сравнительный анализ ИБД представлен в таблице 2:
Таблица 2
| Условное наименование | Диапазон измерений | Погрешность нуля пог- реш- ность коэффи- циента передачи | Рабочая температура | Габариты Вес | Исполнение | Производитель |
| IMU (инерциальный измерительный блок) | ωX, ωY, ωZ (3 ДУСа) 1000 гр/с (3 ДЛУ) nx,y,z=50g | по ω 0.04%/σ, по n 0.2%/σ темп. стаб. нуля 5О/час/ σ n=2mg/ σ (0.001%/ σ) | -40÷+75О | 75х56х40 250 г | моноблок модульный процессор, память УВВ, питание ±15В, +5В. | BAE System |
| ИБД | ωX, ωY, ωZ (18÷1800/с) nx,y,z (1÷15g) | по ω ±1%, по n ±2%, нул. сигн. ≤1% | -60÷+60ОС | 2553 г (корпус 1330 г) | моноблок процессор, память УВВ. Питание 18÷31В п.т. | ОАО МНПК «Авионика» |
Дата: 2019-03-05, просмотров: 392.