selsyn — два английских слова: sе1f и synchronizing (самосинхронизирующийся).
 Сельсины имеют две обмотки:
Сельсины имеют две обмотки:
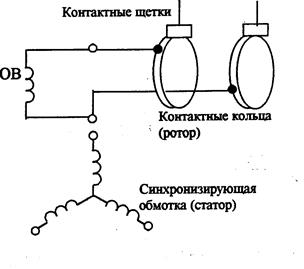
однофазную обмотку возбуждения и синхронизирующую обмотку, состоящую из
трех фаз, расположенных под углом 12Оº относительно друг друга и соединенных звездой.
Одна из обмоток расположена на статоре, а другая - на роторе (рис.5.43 ).
|
§ индикаторном
§ трансформаторном
 | |||||||
 | |||||||
 | |||||||
 | |||||||
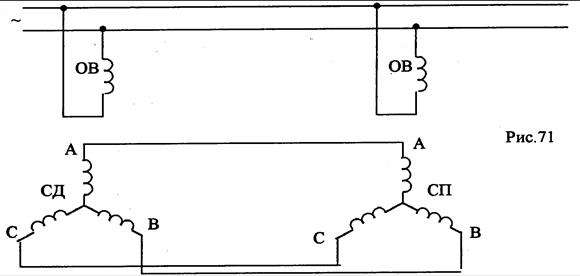
При индикаторном режиме работы (рис.5 44 ) используется два одинаковых сельсина: сельсин — датчик (СД), связан с ведущим валом; сельсин — приемник (СП), связан с ведомым валом.
Если соответствующие синхронизирующие обмотки СД и СП расположены под одинаковым углом к обмотке возбуждения, то в них возникают ЭДС равные по величине и направленные встречно. Ток в обмотках будет отсутствовать, и система синхронизации находится в состоянии покоя, т.е. вращающий момент отсутствует.
Если ротор СД повернуть на какой-то угол, то равенство ЭДС датчика и приемника нарушится, появится ток в обмотке синхронизации СП. Взаимодействие потока возбуждения с током в обмотке синхронизации создаст вращающий момент приемника, и ротор повернется на определенный угол.
5.5.3. Вращающиеся трансформаторы.
Вращающиеся трансформаторы применяются в автоматических устройствах для получения переменного напряжения, представляющего собой определенную функцию угла поворота α.
Различают синусные (u = Umsinα), косинусные (u = Um cosα), синусно — косинусные и линейные (u = K a) вращающиеся трансформаторы.
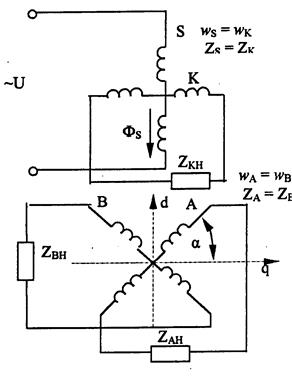
Синусно — косинусные вращающиеся трансформаторы конструктивно подобны машинам с фазным ротором. На статоре размещаются две обмотки, сдвинутые между собой на 90°. Одна обмотка S называется главной, вторая К — вспомогательной или квадратурной. Они имеют одинаковое число витков и одинаковое сечение. Ротор имеет обмотки А и В, расположенные также перпендикулярно друг другу (имеют одинаковое количество витков и сечение) (рис.5.45 ). Обмотки статора и ротора располагаются в пазах. Статор и ротор набираются из электротехнической стали.
|
 При подключении обмотки к источнику переменного напряжения возникает пульсирующий магнитный поток Ф. Если нагрузка отсутствует, то в обмотках будут наводиться ЭДС:
При подключении обмотки к источнику переменного напряжения возникает пульсирующий магнитный поток Ф. Если нагрузка отсутствует, то в обмотках будут наводиться ЭДС:  ,где Еs — ЭДС статорной обмотки (ЕS ≈ U), К - коэффициент пропорциональности (
,где Еs — ЭДС статорной обмотки (ЕS ≈ U), К - коэффициент пропорциональности (  - коэффициент трансформации).
- коэффициент трансформации).
5.5.4. Шаговые двигатели.
Шаговые двигатели применяются для преобразования электрических сигналов (импульсов напряжения) в угловые или линейные дискретные (скачкообразные) перемещения (шаги). Получили распространение в схемах автоматики, где управляющие сигналы задаются в форме импульсов.
Статор выполняется явнополюсным, на каждом полюсе размещена обмотка, которая очень часто разбивается на полуобмотки (это позволяет увеличивать число устойчивых положений). Ротор может быть активным (АШД) и реактивным (РШД). Активный ротор выполняется в виде постоянного магнита или электромагнита. Реактивный ротор выполняется из магнитомягкого материала (внутри находится постоянный магнит из кобальтовой стали — магнитотвердый материал с большой коэрцитивной силой). На статоре и роторе имеются зубцы.
Питание обмоток статора осуществляется через электронный коммутатор, который преобразует одноканальную последовательность импульсов в многофазную систему напряжений (рис.5.47 ).
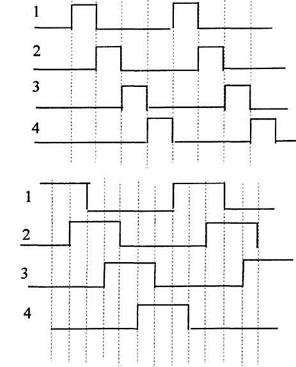 1 - 2 – 3 - 4 – 1 – 2
1 - 2 – 3 - 4 – 1 – 2
|
Существуют схемы коммутации, которые позволяют включать несколько обмоток (рис.5.48).
1- 12- 2- 23- 3- 34- 4- 41- 1- 12-
Данная схема коммутации называется несимметричной. Включается то одна, то две обмотки. Это позволяет добиться больше шагов на один оборот. Но при этом момент не одинаков.
Чтобы осуществить реверс, необходимо изменить последовательность коммутации обмоток шагового двигателя.
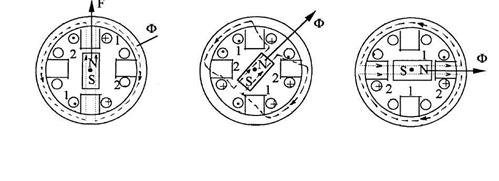 После подачи питания на обмотки статора возникает электромагнитный момент вследствие взаимодействия магнитных потоков статора и ротора. Этот момент поворачивает ротор в положение наибольшего потокосцепления с обмотками статора (рис.5.49).
После подачи питания на обмотки статора возникает электромагнитный момент вследствие взаимодействия магнитных потоков статора и ротора. Этот момент поворачивает ротор в положение наибольшего потокосцепления с обмотками статора (рис.5.49).
|
|
 Достоинства шагового двигателя: большой момент за счет использования постоянного тока и применения магнитов с большой магнитной индукцией.
Достоинства шагового двигателя: большой момент за счет использования постоянного тока и применения магнитов с большой магнитной индукцией.
Недостатки: скачкообразное перемещение ротора; необходимость синхронизации частоты питающего напряжения со скоростью ротора(иначе произойдет потеря информации).
Источники информации :
1. А.С.Касаткин § 10.6, 10.13
2. А.Я.Шихин § 76, 81, 82
3. Л.В.Усс § 19.2, 19.3, 19.4
Дата: 2019-02-19, просмотров: 437.