Микропроцессорные системы управления активно внедряются на современных су
дах.
Применяемые релейно-контакторные системы управления представляют собой
аппаратно реализованный алгоритм управления электроприводом, состоящий из логиче
ской и силовой частей.
Для каждого ЭП разрабатывается самостоятельная схема управления, позволяю
щая выполнять определенные функции. Эти устройства, работающие на жесткой логи
ке, имеют серьезные недостатки, которые затрудняют решение сложных задач управле
ния, не создают гибкости в работе и не решают задачи оптимизации процессов.
Такие недостатки отсутствуют у программируемых устройств логического управ
ления. К ним относятся микропроцессоры и построенные на их основе микроЭВМ, а также программируемые контроллеры. Если в релейно-контактор-ных системах управ
ления ЭП используют аналоговые регуляторы с фиксированными уставками срабатыва
ния, то в микропроцессорных системах применяется цифровая информация в двоичном коде.
Источником информации о состоянии ЭП являются датчики тока, напряжения, температуры, скорости и др. Для обработки информации в МП сигналы с этих датчи
ков преобразуются в цифровой двоичный код. Процесс преобразования обычно осуще
ствляется в 3 этапа.
Первый этап - преобразование сигналов разной физической природу в напряже-
ние постоянного тока.
Вторым этапом является нормализация сигнала. Это понятие включает в себя комплекс мер по улучшению качества сигнала, повышению достоверности содержащей
ся в сигнале информации. Сюда входит усиление сигнала, подавление и фильтрация помех, согласование уровня сигнала с номинальным уровнем преобразователя аналог-код.
Наконец, третий этап - соответственно аналого-цифровое преобразование. Так как аналоговой величиной здесь является напряжение, то речь идет о преобразовании напряжения в двоичный код.
В большинстве тиристорных ЭП управление силовым преобразователем осуще-
ствляется аналоговыми сигналами.
Поэтому после обработки информации МП требуется ее обратное преобразова
ние из цифровой формы в форму импульса напряжения постоянного тока требуемых -уровня и полярности. Эта операция осуществляется цифроаналоговым преобразовате-
лем.
Структурная схема микропроцессорной системы управления электропри-
Водом
В состав микропроцессорной системы управления ЭП входят следующие блоки и
устройства (рис.9.65 ):
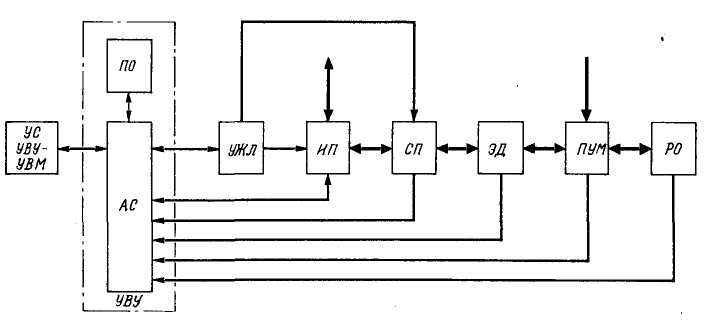
Рис. 9.65. Структурная схема микропроцессорной системы управления электроприводом:
УС – устройство связи; УВУ -
устройство связи УС со старшей по иерархии ЭВМ или с оператором.
В УС используются преобразователи кодов, пульт управления с устройством
отображения информации;
управляющее вычислительное устройство УВУ, состоящее из аппаратных средств АС и программного обеспечения ПО.
Аппаратные средства - это по существу комплекс жестко закоммутированных автоматов, который за счет использования специальных программ становится функцио
нальным узлом специфического применения.
В системе управления УВУ занимает центральное место, вырабатывая управляю
щие сигналы на основании директив, поступающих через УС от ЭВМ следующего по иерархии уровня и сигналов с датчиков, установленных в устройствах, которые перечислены ниже;
устройство жесткой логики УЖЛ, представляющее собой систему отдельных жестко закоммутированных блоков управляющей аппаратуры.
Эта аппаратура служит для автономного управления процессом в случае выхода из строя ЭВМ, а также при необходимости вмешательства обслуживающего персонала в ходе управления процессом.
В ряде случаев эти блоки или часть их участвуют в автоматическом режиме рабо
ты, если от системы требуется высокое быстродействие. Выходные сигналы УЖЛ поступают на входы источника питания ИП и силового преобразователя СП;
управляемый источник силового питания, в качестве которого может быть управ
ляемый или неуправляемый выпрямитель.
В отдельных тиристорных преобразователях функции ИП и СП совмещают. Жирными стрелками на рис. 9.65 отмечено направление потока электроэнергии в двига
тельном и рекуперативном режимах, светлыми - потоки информации. Управляющие сиг
налы ИП получает от УВУ и УЖЛ, в обратном направлении следует диагностическая и сигнальная информация;
силовой преобразователь СП, обычно представляющий управляемый выпрями-
тель или инвертор в преобразователе частоты. Поток электроэнергии в СП также 2-сторонний (в зависимости от режима двигателя).
Управляющие сигналы поступают от УЖЛ и УВУ, а в обратном направлении следует диагностическая и сигнальная информация;
электродвигатель ЭД, включающий в себя, кроме двигателя, также датчики
скорости, тока и температуры обмоток;
передаточное устройство механизма ПУМ и рабочий орган РО механизма (например, цепная звездочка на брашпиле).
Для выявления функциональных взаимосвязей в системе рассмотрим процесс прохождения информации.
Основным информационным и управляющим компонентом системы является УВУ, в качестве которого могут применяться микроЭВМ или программируемый Конт-
роллер. На входы УВУ информация поступает от ЭВМ соседнего по иерархии уровня.
Связь УВУ с устройствами системы осуществляется с помощью аналоговых, цифровых и импульсных сигналов.
Для этого в состав УВУ вводятся аналого-цифровые, цифроаналоговые, цифро-
импульсные, импульсно-цифровые преобразователи.
Для связи с оператором применяются устройства ввода-вывода: пульт с диспле-
ем или без него, печатающее устройство и т. п.
На УВУ поступает информация с датчиков о ходе процессов и состоянии пара-
метров ИП и СП. Эта информация используется для коррекции управляющих сигналов и для контроля работоспособности.
Двигатель, передаточное устройство и рабочий орган также оборудуются датчи
ками состояния. Информация с них постоянно или по запросу подается на УВУ, где используется в качестве сигналов обратных связей или диагностических сообщений.
Архитектура микропроцессора
Микропроцессор как управляющее устройство является составной частью в
системе управления автоматизированным ЭП. Рассмотрим сначала функциональный состав и принцип действия МП как комплексного программно-управляемого элемента.
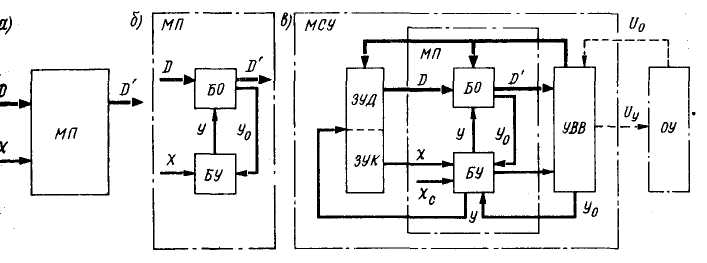
Рис. 9.66. Структурная схема модели микропроцессора
Микропроцессор представляет собой единое устройство в виде некоторого «чер
ного ящика» ( 9.66, а ), имеющего внешние входы и выходы для рабочей информации (данные D, D') и для команд управления данными ( X).
Внутри МП происходят 2 процесса:
1. обработка данных, при котором поступающие в данные D подвергаются логиче-
ским и вычислительным операциям и в новом качестве D' выводятся из МП;
2. управление обработкой данных на основании заранее составленной программы
( X).
В соответствии с указанными процессами в составе МП можно выделить 2 основ-
ных функциональных блока - блок операций БО и блок управления БУ ( рис. 9.66, б).
Основным является блок операций, так как именно он реализует функциональное назначение МП.
Блок управления обеспечивает правильное функционирование БО, при этом по-
ступающая программа работы МП в виде последовательности команд X. преобразуется БУ с учетом сигналов Yo, оповещающих о состоянии БО, в серию управляющих сигналов Y, воздействующих на БО.
В своей работе МП взаимодействует с внешними устройствами, которые совмест
но с ним образуют микропроцессорную систему управления МСУ некоторым объектом ОУ (рис. 9.87, в).
Источником исходных данных и программы являются соответственно запоминающие устройства данных ЗУД и команд ЗУ К.
Приемником обработанных данных служит так называемое устройство ввода-вы-
вода УВВ, через которое обработанная цифровая рабочая информация D' в преобразо-
ванном виде как выходное управляющее воздействие Uy поступает на объект управления.
Из ОУ в УВВ поступает информация о состоянии объекта управления в виде сигналов обратных связей Uo.
В МСУ поток рабочей информации может иметь не только прямое направле-
ние (от ЗУД и к УВВ), но и обратное (от УВВ к МП и к ЗУД). Это дает возможность обмена информацией между ЗУД, БО и УВВ, позволяет обрабатывать данные обрат-
ных связей и запоминать результаты операций.
Совместная взаимосвязанная работа всех устройств и блоков в МСУ обеспечи-
вается системой управляющих сигналов Yn Yo.
Необходимая согласованность действий во времени блоков МП и МСУ достига-
ется с помощью синхронизирующих импульсов Хс, поступающих от генератора высоко-
стабильной частоты.
Дата: 2019-02-02, просмотров: 545.