К скоростным характеристикам АРЧ относятся внешние и частичные ( ограничи
тельные ).
Внешней характеристикой называется зависимость мощности ДВС N  от частоты
от частоты
вращения вала n при подаче топлива, соответствующей номинальной мощности дизеля.
На рис. 3.1, а при частоте вращения n = n  ( т.е. при n
( т.е. при n  = 100% ) мощность дизеля N = 100%.
= 100% ) мощность дизеля N = 100%.
При уменьшении частоты вращения ( но неизменной подаче топлива ) мощность ди
зеля уменьшается. На рис. 3.1, а при работе дизеля на внешней характеристике 1 и умень-
шении частоты вращения до минимально допустимого значения n  = 25% n мощ-
= 25% n мощ-
ность дизеля N ≈ 45%.
Поскольку работа двигателя по внешней характеристике сопровождается дымным выпуском, высоким расходом топлива, высокой температурой выпускных газов и наруше-
нием теплового равновесия дваигателя, в эксплуатации работа на внешней предельной ха-
рактеристике или даже на отдельных точках этой характеристики не допускается
Частичной характеристикой называется зависимость мощности ДВС N от частоты
вращения вала n при подаче топлива, соответствующей меньшим номинальной значениям мощности дизеля.
Частичная характеристика лежит ниже внешней и определяет верхний предел поля
допустимых наибольших мощностей при длительной работе двигателя и без дымления.
Обычно параметры внешних и частичных характеристик выражают в процентах ( рис. 3.2, 3.3 ) или относительных единицах.
Поле возможных режимов работы ДВС совместно с генератором электрической энергии (рис. 3.2 ) расположено в интервале n'—n'' допустимого отклонения частоты вра-
щения генератора от номинального значения ( на рис. 3.2 заштриховано).
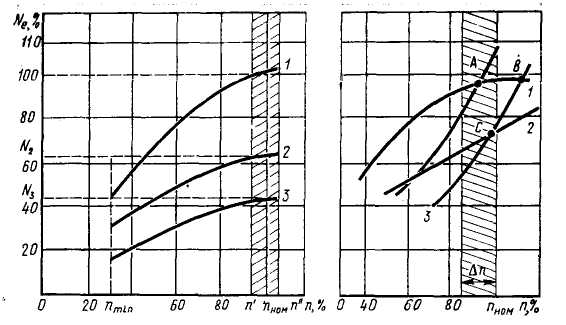
Рис.3.2. Характеристики ДВС, Рис. 3.3. Совмещенные характе-
работающего совместно с ристики ДВС и генератора:
генератором: 1 – внешняя 1 – внешняя ДВС; 2 - частичная
( при номинальной мощно- ДВС; 3, 4 – нагрузочные гене-
сти ); 2, 3 – частичные ратора при уменьшении нагрузки
( 3 ) и номинальной нагрузке ( 4 )
Из рис. 3.2 видно, что при уменьшении электрической нагрузки до значения N 2
или N3 двигатель должен перейти на частичные внешние характеристики 2 или 3, для чего надо уменьшить подачу топлива..
Для оценки работы двигателя с генератором обычно рассматривают их совмещен-
ные характеристики (рис. 3.3 ).
Если принять, что точка А пересечения внешней характеристики 1 ДВС и нагрузоч
ной характеристики 4 генератора представляет номинальный режим работы, a Δn – допу-
стимое изменение частоты вращения, то очевидно, что даже незначительное уменьшение нагрузки генератора (характеристика 3) повлечет за собой изменение частоты вращения, выходящее за намеченную границу (новый режим работы устанавливается в точке В).
Для обеспечения заданного диапазона частоты вращения нужно при новой нагруз-
ке генератора перейти на новую частичную характеристику 2 двигателя, тогда новый ре-
жим работы установится в точке С.
Для перехода на частичную характеристику 2 при незначительном уменьшении на-
грузки и увеличении частоты вращения следует воздействовать на рейку топливных насо-
сов в сторону уменьшения подачи, а при увеличении нагрузки на генератор и понижении частоты вращения — в сторону увеличения подачи топлива.
Для этой цели на приводной двигатель, работающий совместно с генератором, уста
навливают регулятор, который может поддерживать один скоростной режим в пределах допустимого изменения частоты вращения Δn.
Дизель-генератор и регулятор частоты вращения образуют замкнутую систему авто
матического регулирования, которая обеспечивает автоматическое поддержание частоты вращения коленчатого вала двигателя с заданной степенью точности.
По классификационным признакам и назначению существуют различные типы регуляторов (табл. 3.1).
Классификация АРЧ
В настоящее время принята следующая классификация АРЧ ( таблица 3.1.).
Таблица 3.1.
Классификация регуляторов частоты вращений вала приводных двигателей ГА
| Тип регулятора | Выполняемые функции |
| По назначению и режимности работы | |
| Однорежимный | Поддерживает один скоростной режим |
| Двухрежимный | Поддерживает два скоростных режима ( минимально устойчивой и номинальной частоты вращения ) |
| Всережимный | Поддерживает любой скоростной заданный режим двигателя ( выше минимально устойчивой частоты вращения ) |
| Предельный | Включается в работу только в случае превышения номинальной частоты вращения |
| По типу измерительной части регулятора | |
| Механический | Входной сигнал ( частота вращения ) преобразуется измерите- лем регулятора в механическое перемещение |
| Гидравлический | Входной сигнал ( частота вращения ) преобразуется в энергию давления масла |
| Электрический | Входной сигнал ( частота вращения ) преобразуется в электри- ческую величину ( напряжение или ток ) и механическое пере мещение |
| По способу воздействия измерительного устройства на регулирующий орган | |
| Прямого действия | Перемещение рейки ТНВД происходит только за счет энергии, сообщаемой ей измерительной частью регулятора |
| Непрямого действия | Выходной сигнал измерительной части регулятора передается на топливную рейку усиленным ( через усилитель ) |
| По количеству входных сигналов | |
| Одноимпульсные | Работает по отклонению только одной величины ( частоты вращения ) |
| Двухимпульсные | Работает по отклонению двух величин ( частоты вращения и Активной нагрузки генератора ) |
| По виду регуляторной характеристики | |
| Астатический | Поддерживает частоту вращения постоянной при любых нагруз ках |
| Статический | Поддерживает частоту вращения коленчатого вала дизеля в установленных пределах Δn при изменении нагрузки |
| Комбинированный | В зависимости от настройки может работать как по статиче- ской, так и по астатической характеристике |
| По осуществляемому закону регулирования | |
| Интегральный ( И - регулятор ) | Отклонение частоты вращения влияет только на скорость пере- мещения рейки ТНВД |
| Пропорциональный ( П – регулятор ) | Отклонение частоты вращения влияет только на величину пере мещения рейки топливных насосов |
| Пропорционально-интегральный ( ПИ- регулятор ) | Отклонение частоты вращения влияет на величину и скорость перемещения рейки топливных насосов |
| По типу обратных связей | |
| С жесткой обратной связью | Осуществляет пропорциональный закон регулирования ( П – ре гулятор ). Регуляторная характеристика статическая |
| С гибкой обратной связью | Осуществляет пропорционально-интегральный закон регулиро- вания ( ПИ – регулятор ), Регуляторная характеристика астати- ческая. |
Применение разных типов АРЧ
Применение того или иного вида АРЧ зависит от условий работы ГА ( одиночная, параллельная работа ) и от требований, предъявляемых к точности регулирования частоты вращения ГА.
Например, АРЧ, обеспечивающие работу приводных двигателей ГА по астатиче-
ским характеристикам, применяют только при одиночной работе ГА и называют астати-
ческими. Такие регуляторы называют также интегральными, или регуляторами И-типа. У них отклонение частоты вращения влияет только на скорость перемещения рейки ТНВД.
АРЧ, предназначенные для обеспечения параллельной работы ГА, должны рабо-
тать только по статическим характеристикам. Для статической характеристики δ > 0, т. е. частота вращения ПД уменьшается с увеличением нагрузки генератора (см. рис. 2.1, характеристика 2).. Такие регуляторы называют статическими а также пропорциональны
ми или регуляторами П-типа. У них отклонение частоты вращения влияет только на вели-
чину перемещения рейки топливных насосов
Регуляторы, обеспечивающие работу ПД по астатической и статической характери-
стикам, называют универсально-статическими. Такие регуляторы называют также пропор
ционально-интегральными или регуляторами ПИ-типа. У них отклонение частоты враще-
ния влияет как на величину, так и на скорость перемещения рейки топливных насосов.
В зависимости от изменяемых величин различают АРЧ одно- и двухимпульсные. Одноимпульсные АРЧ изменяют подачу топлива при изменении частоты и потому
снабжаются центробежными (частоты вращения вала) или электрическими (частоты тока) датчиками.
Двухимпульсные АРЧ дополнительно снабжены датчиком активного тока, поэтому у них подача топлива зависит как от частоты вращения ( тока ), так и от активной нагруз-
ки. Точность стабилизации частоты вращения у них лучше, чем у одноимпульсных, но при этом усложняется схема управления АРЧ.
В зависимости от наличия усиления различают АРЧ прямого и непрямого дейст-
вия. В АРЧ прямого действия датчик частоты вращения воздействует на регулирующий орган непосредственно, а в АРЧ непрямого действия - через усилитель (сервомотор).
АРЧ прямого действия применяются для ГА небольшой мощности. На большинст
ве современных судов применяются двухимпульсные ГА.
Более подробная классификация АРЧ приведена в таблице 3.1.
Дата: 2019-02-02, просмотров: 490.