UART
Универсальный асинхронный приёмопередатчик (УАПП, англ. Universal Asynchronous Receiver-Transmitter, UART) — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. Преобразует передаваемые данные в последовательный вид так, чтобы было возможно передать их по одной физической цифровой линии другому аналогичному устройству. Передача данных в UART осуществляется по одному биту в равные промежутки времени. Этот временной промежуток определяется заданной скоростью UART и для конкретного соединения указывается в бодах (что в данном случае соответствует битам в секунду). Существует общепринятый ряд стандартных скоростей: 300; 600; 1200; 2400; 4800; 9600; 19200; 38400; 57600; 115200; 230400; 460800; 921600 бод.
I²C
I ² C (IIC, англ. Inter-Integrated Circuit) — последовательная асимметричная шина для связи между интегральными схемами внутри электронных приборов. Использует две двунаправленные линии связи (SDA и SCL), применяется для соединения низкоскоростных периферийных компонентов с процессорами и микроконтроллерами
Разработана фирмой Philips Semiconductors в начале 1980-х как простая 8-битная шина внутренней связи для создания управляющей электроники. Была рассчитана на частоту 100 кГц. Стандартизована в 1992 году, в первой версии к стандартному режиму 100 кбит/с добавлен скоростной режим 400 кбит/с (Fast-mode, Fm); за счёт 10-битной адресации становится возможным подключение на одну шину более 1000 устройств, количество которых ограничивается максимально допустимой ёмкостью шины — 400 пФ. Данные передаются по двум проводам — проводу данных и проводу тактов. Есть ведущий (master) и ведомый (slave), такты генерирует master, ведомый лишь «поддакивает» при приёме байта. Всего на одной двухпроводной шине может быть до 127 устройств.
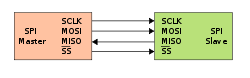
SPI
SPI (англ. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс, шина SPI) — последовательный синхронный стандарт передачи данных в режиме полного дуплекса, предназначенный для обеспечения простого и недорогого высокоскоростного сопряжения микроконтроллеров и периферии.
USB
USB (ю-эс-би, англ. Universal Serial Bus — «универсальная последовательная шина») — последовательный интерфейс для подключения периферийных устройств к вычислительной технике. Получил широчайшее распространение и фактически стал основным интерфейсом подключения периферии к бытовой цифровой технике.
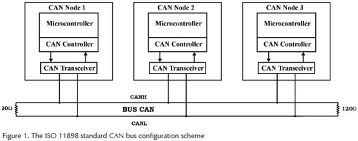
CAN
CAN (англ. Controller Area Network — сеть контроллеров) — стандарт промышленной сети, ориентированный, прежде всего, на объединение в единую сеть различных исполнительных устройств и датчиков. Режим передачи — последовательный, широковещательный, пакетный.
CAN разработан компанией Robert Bosch GmbH в середине 1980-х и в настоящее время широко распространён в промышленной автоматизации, технологиях «умного дома», автомобильной промышленности и многих других областях. Стандарт для автомобильной автоматики.
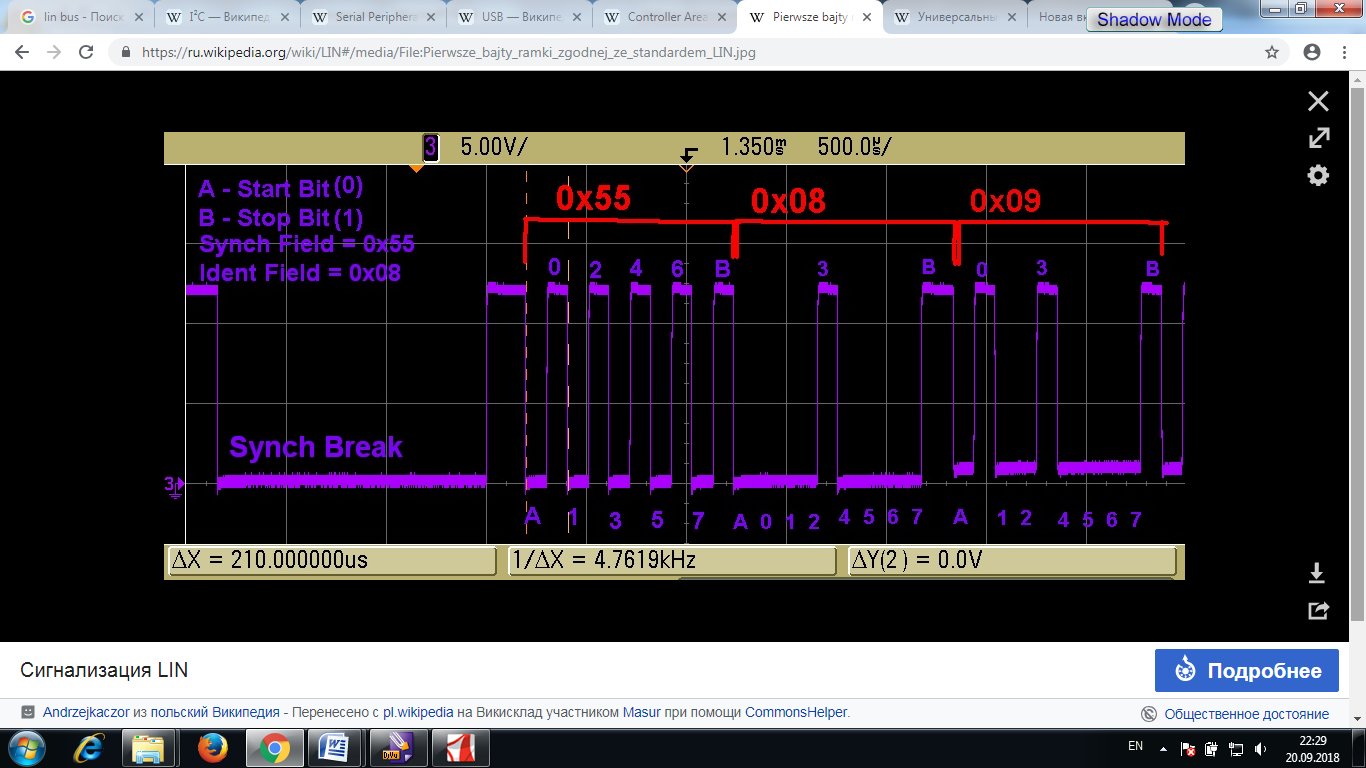
LIN
ISO 17987 — стандарт промышленной сети, ориентированный на управление автомобильными системами низкой ответственности. Первоначально известен как LIN(англ. Local Interconnect Network). Первая спецификация стандарта под брендом LIN была издана в 1999 году по инициативе консорциума европейских автопроизводителей и других известных компаний, включая Audi AG, BMW AG, Daimler Chrysler AG, Motorola Inc., Volcano Communications Technologies AB, Volkswagen AG и VolvoCar Corporation. Последняя спецификация консорциума (LIN 2.2) издана в 2010 году. В настоящее время документы стандарта переданы под контроль Международной организации по стандартизации (ISO), где стандарту был присвоено новое наименование ISO 17987. В связи с политикой ISO копия стандарта стала платной.
RS485
RS-485 (англ. Recommended Standard 485), EIA-485 (англ. Electronic Industries Alliance-485) — стандарт физического уровня для асинхронного интерфейса. Название стандарта: ANSI TIA/EIA-485-A:1998 Electrical Characteristics of Generators and Receivers for Use in Balanced Digital Multipoint Systems. Регламентирует электрические параметры полудуплексной многоточечной дифференциальной линии связи типа «общая шина».
Стандарт приобрел большую популярность и стал основой для создания целого семейства промышленных сетей, широко используемых в промышленной автоматизации.
В стандарте RS-485 для передачи и приёма данных используется одна витая пара проводов, иногда сопровождаемая экранирующей оплеткой или общим проводом.
Передача данных осуществляется с помощью дифференциальных сигналов. Разница напряжений между проводниками одной полярности означает логическую единицу, разница другой полярности — ноль.
1. Стандарт RS-485 оговаривает только электрические и временные характеристики интерфейса.
2. Стандарт RS-485 не оговаривает:
· параметры качества сигнала (допустимый уровень искажений, отражения в длинных линиях),
· типы соединителей и кабелей,
· гальваническую развязку линии связи,
· протокол обмена.
Дата: 2019-02-02, просмотров: 485.