Управление – процесс постановки цели, определение способа её достижения (концепции) и практическая реализация концепции управления для достижения избранной цели. Управление – правильная воля. Власть – реализованная на практике способность к управлению.
• субъект управления (тот, кто управляет):
• объект управления (то, чем управляют);
• прямые связи (от субъекта к объекту);
• обратные связи (от объекта к субъекту)
• внешняя среда (совокупность всех внешних факторов, оказывающих воздействие на процесс управления).

Манипуляция – движение рук при выполнении какой-либо работы.
Локомо́ция (фр. locomotion «передвижение» от лат. locō mōtiō «движение с места») — перемещение животных (в том числе человека) в пространстве (в водной среде, воздушной среде, по твёрдой поверхности, в плотной среде), обусловленное их активными действиями. Локомоция играет важную роль в жизни животных: в отличие от большинства растений, они могут передвигаться для поиска пищи или для спасения от хищников
Контрольные вопросы
1. системы управления роботом
2. полная функция управления
3. схема управления
4. манипуляция
5. локомация
07.09.2018
Проектирование робота в среде ISIS Proteus . Основные команды управления техническими системами.
Среда разработки ISIS Proteus
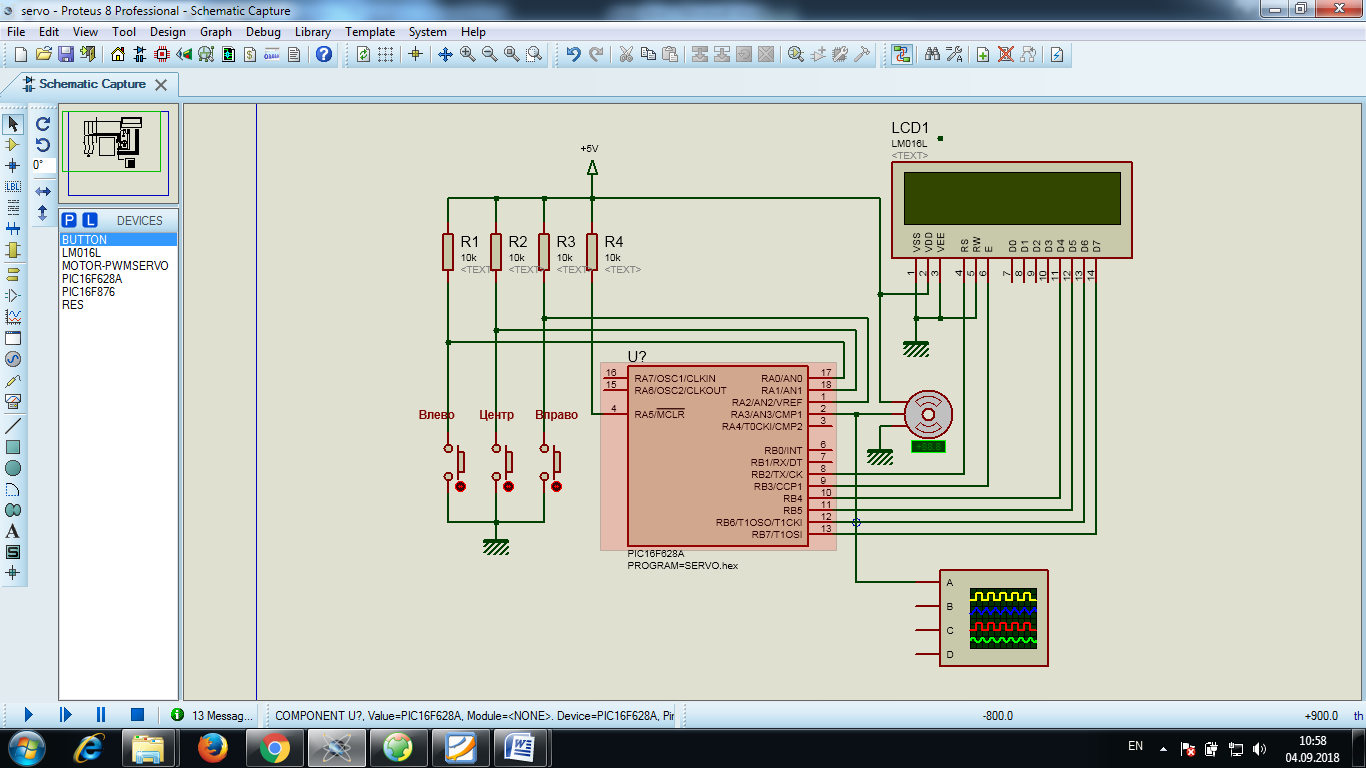
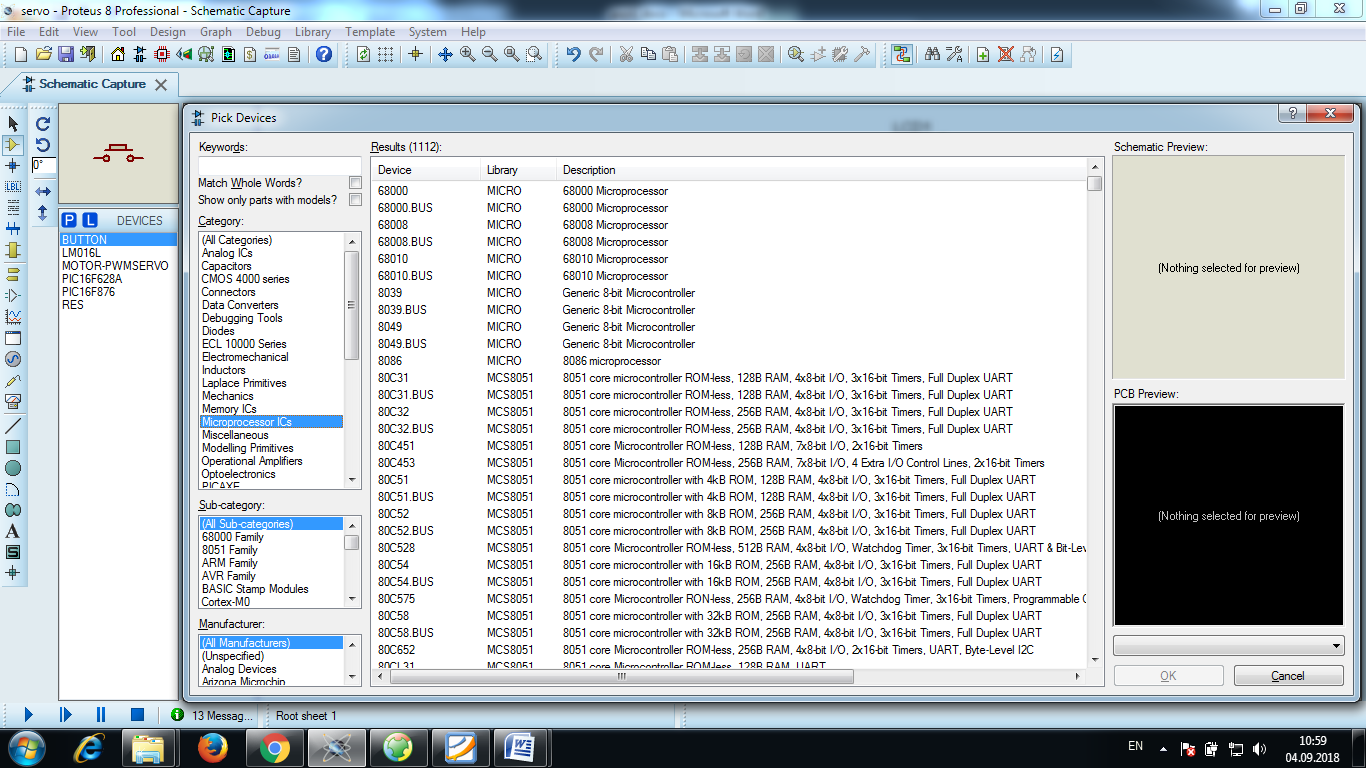
База необходимых элементов
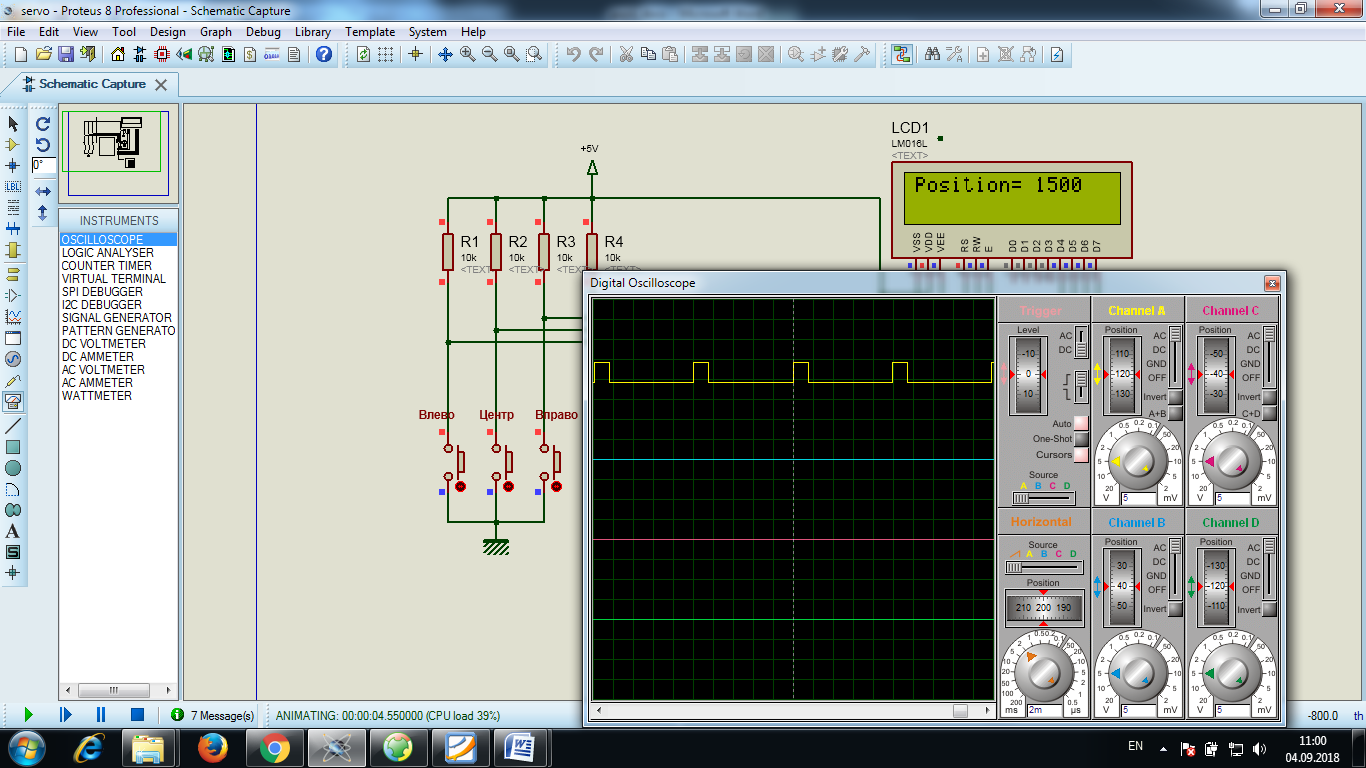
Приборы изменрения при моделировании
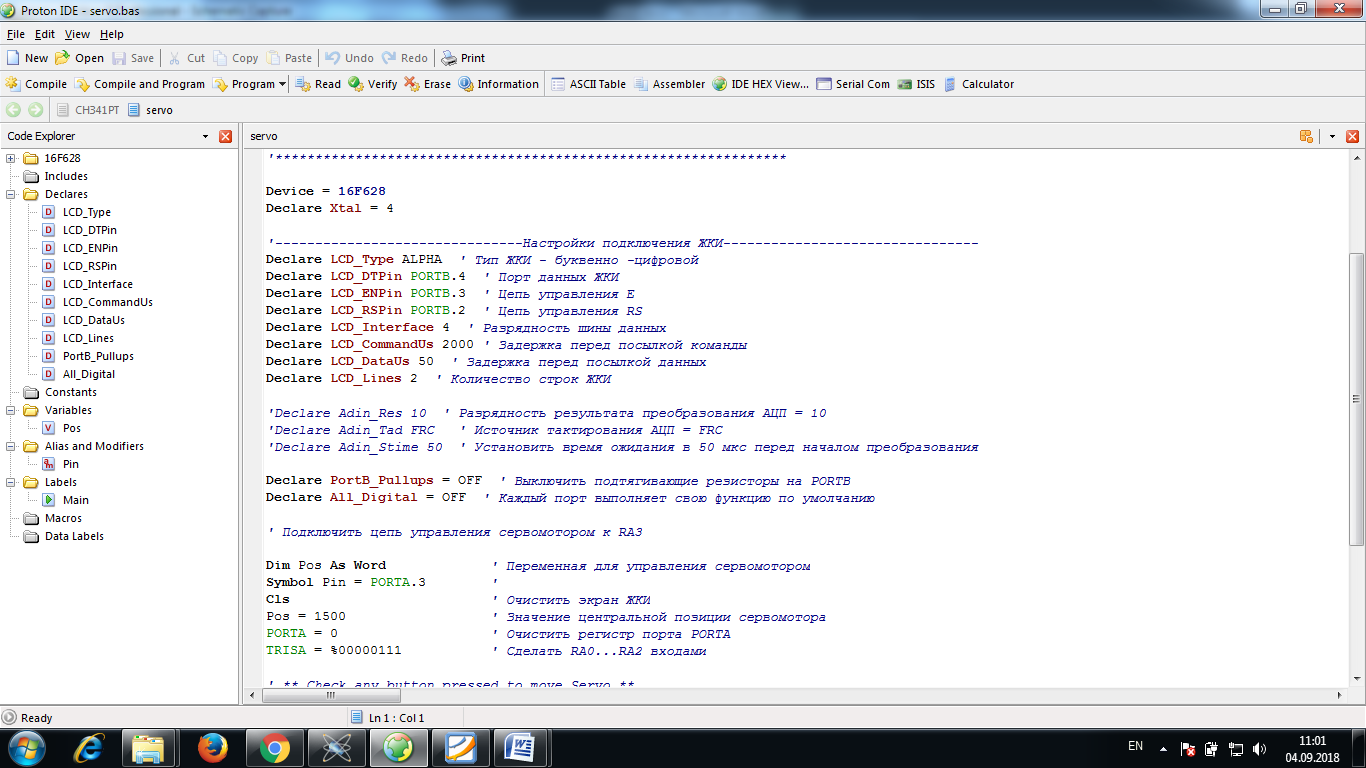
Программа микроконтроллера
Среда разработки Arduino
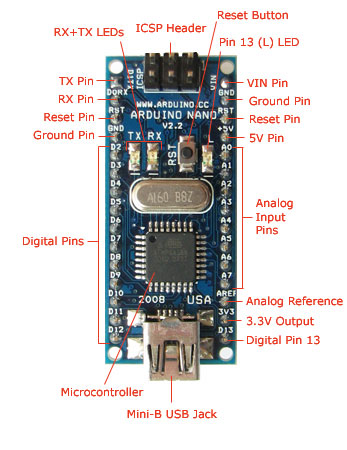
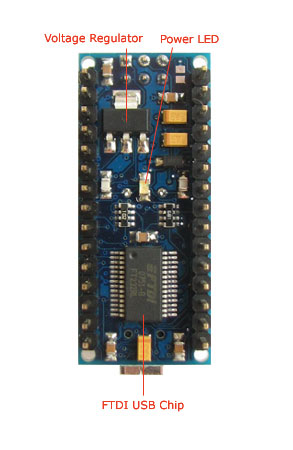
Плата Nano
· Последовательная шина: 0 (RX) и 1 (TX). Выводы используются для получения (RX) и передачи (TX) данных TTL. Данные выводы подключены к соответствующим выводам микросхемы последовательной шины FTDI USB-to-TTL.
· Внешнее прерывание: 2 и 3. Данные выводы могут быть сконфигурированы на вызов прерывания либо на младшем значении, либо на переднем или заднем фронте, или при изменении значения. Подробная информация находится в описании функции attachInterrupt().
· ШИМ: 3, 5, 6, 9, 10, и 11. Любой из выводов обеспечивает ШИМ с разрешением 8 бит при помощи функции analogWrite().
· SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Посредством данных выводов осуществляется связь SPI, которая, хотя и поддерживается аппаратной частью, не включена в язык Arduino.
· LED: 13. Встроенный светодиод, подключенный к цифровому выводу 13. Если значение на выводе имеет высокий потенциал, то светодиод горит.
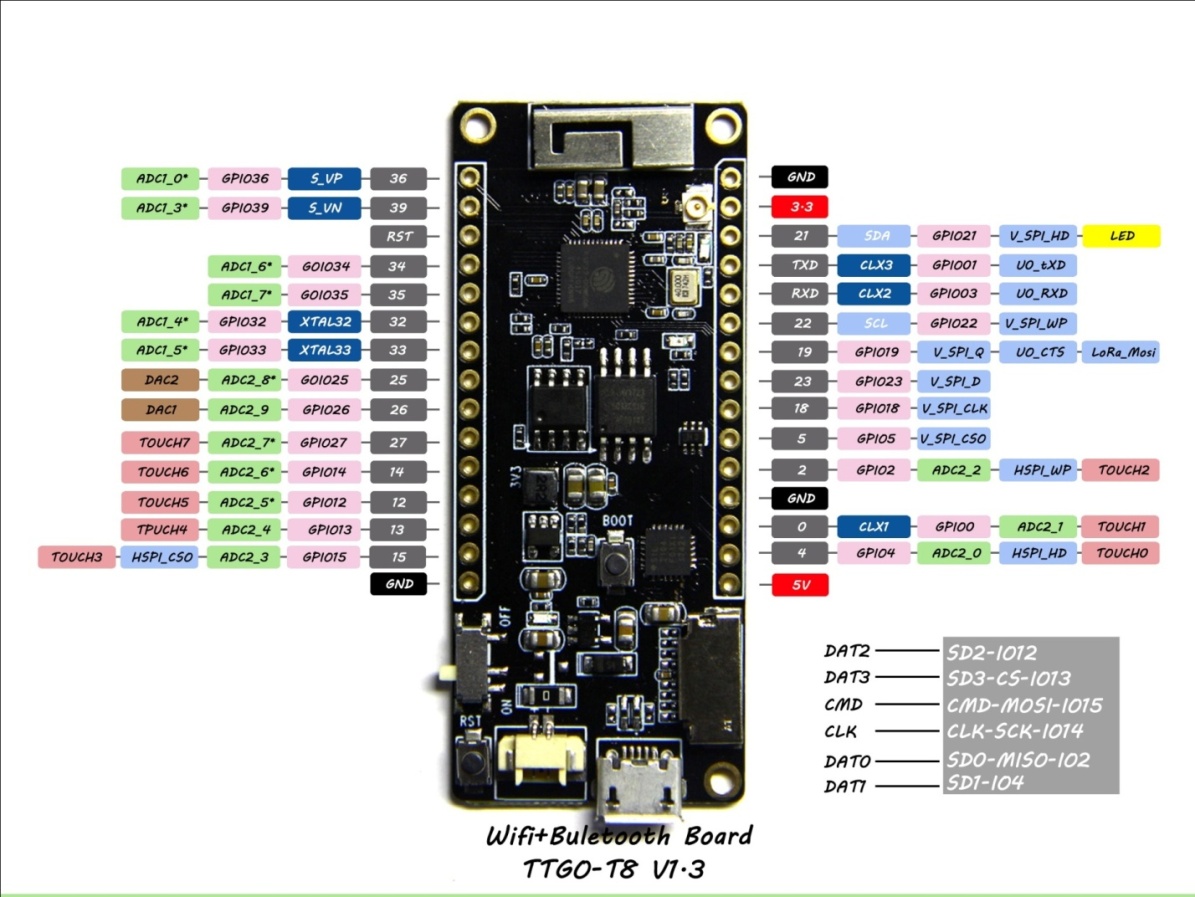
ESP32 для разработки IoT
Основные команды в PicBasic для проектирования робототехнических систем
1. ADIN
2. HPWM
3. INC
4. LCDWrite
5. POT
6. PULSIN
7. PULSOUT
8. RCIN
9. SERVO
Контрольные вопросы
1. Основные особенности среды разработки Proteus
2. Этапы разработки схемы
3. Современные микроконтроллеры
4. Технология IoT
14.09.2018
Дата: 2019-02-02, просмотров: 381.