| Наименование | Обозначение | Данные измерений | Характеристика |
| Форма головки | |||
| Направление подачи | |||
| Форма режущей кромки | |||
| Материалы тела резца и режущей части | |||
| Главный задний угол | |||
| Вспомогательный задний угол | |||
| Передний угол | |||
| Угол заострения | |||
| Угол резания | |||
| Главный угол в плане | |||
| Вспомогательный угол в плане | |||
| Угол при вершине в плане | |||
| Угол наклона главной режущей кромки | |||
Выводы.
Лабораторная работа №4
Изучение кинематической схемы токарно-винторезного станка и определение элементов режима резания
Кинематическая схема металлорежущего станка - это графическое изображение взаимосвязей механизмов станка.
Механизмы станка обеспечивают заданные движения инструментов и заготовок. По схеме можно установить направление движения, его скорость, а также преобразование этого движения в механизме. Часть схемы, непосредственно передающая движение от привода к исполнительному органу, называют кинематической цепью. В частности, на схеме токарно-винторезного станка модели 16K20 различают цепи главного движения (от электродвигателя к шпинделю), движения подачи (от шпинделя до резца) и ускоренного nеремещенuя резца (с индивидуальным электродвигателем). Движения осуществляются с помощью передач - ременной, зубчатых, винтовой и реечной. Зная передаточные числа, можно определить частоту вращения шпинделя (заготовки), величину подачи резца по ходовому валу и ходовому винту (для нарезания резьбы). Управление и настройка станка происходят путем включения (включения) муфт и передвижения блоков зубчатых колес.
Задание
1. Описать части и механизмы токарно-винторезного станка модели: 16К20.
2. По кинематической схеме произвести расчет элементов режима резания, данные расчета свести в таблицу.
3. Сделать выводы.
Отчет
1. Описание частей и механизмов станка.
2. Рассчитать частоту вращения шпинделя (nшп) по кинематической цепи главного движения (от электродвигателя до шпинделя через коробку скоростей).
nшп=nэд×iобщ×g, мин-1,
где nэд – частота вращения вала электродвигателя главного движения (М1), мин-1;
g - коэффициент проскальзывания (потерь) в клиноременной передаче;
iобщ – общее передаточное отношение цепи.
Рассчитать скорость резания по кинематической формуле.
где Д – диаметр обработки, мм.
3.Рассчитать подачи суппорта (с резцедержателем и резцом).
1. Через ходовой вал (продольную, от шпинделя до резца):

где iпост – передаточное отношение от шпинделя до сменных колес;
iсм – то же для сменных колес;
iкп – то же для коробки подач;
iф.прод. – то же для фартука суппорта (продольная);
m – модуль реечного зацепления;
Z – число зубьев реечного колеса.
iф.поп. – передаточное отношение фартука суппорта (поперечное);
tпоп. – шаг винта поперечной подачи, мм.
4. Через ходовой вал (поперечную) и винт поперечной подачи:

iф.поп. – передаточное отношение фартука суппорта (поперечное);
tпоп. – шаг винта поперечной подачи, мм.
5 . Через ходовой винт (продольную) для нарезания резьбы:

где tнарез. – шаг нарезаемой резьбы, мм;
iсм – шаг ходового винта, мм.
Без коробки подач
tнарез.= iпост× iсм× iх.винт, мм.
Рассчитать крутящий момент на шпинделе
где Nшп – мощность на шпинделе станка, кВт.

где Nэд – мощность электродвигателя, кВт;
hст – КПД кинематической цепи.
hст=hкп×hэк×hподш,
где hкп – потери в клиноременной передаче;
hэк – потери в зубчатых колесах;
hподш – потери в подшипниках.
Рассчитать потребную мощность, кВт
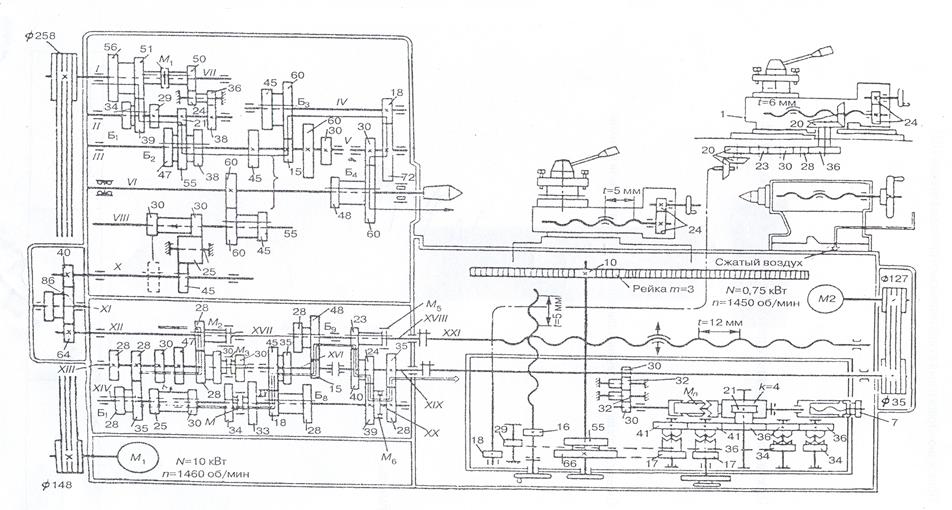
Рис. 4.1 Кинематическая схема токарно-винторезного станка модели 16К20
Выводы.
Лабораторная работа №5
Дата: 2018-12-21, просмотров: 484.