ГОСТ 25478-82 указывает на необходимость введения инструментальных методов контроля рулевого привода и его шарнирных сочленений. Однако, кроме суммарного люфта рулевого колеса, общепризнанный критерий оценки эксплуатационного состояния рулевого привода отсутствует.
Существующие способы испытания рулевого управления автомобилей заключаются в приложении усилия к поворотным площадкам или непосредственно к шине. При этом величина измеряемого параметра (суммарного люфта) выражается косвенно, путём измерения углов поворота площадок (или боковых сил). Существующие методы оценки эксплуатационного состояния РП не обладают требуемой достоверностью из-за невозможности раздельного определения величин упругости и зазоров в подвижных сопряжениях, которые оказывают не однозначное влияние на эксплуатационные свойства автомобилей.
В этой связи для решения задач диссертационной работы разработан силовой способ испытания рулевых механизмов автомобилей, заключающийся в установке управляемых колёс на поворотные площадки и приложении усилия, нагружающего рулевой привод, и измерении возникающей деформации.
При этом, с целью повышения достоверности результатов испытания, усилия прикладывают непосредственно к дискам колёс, одинаковые по величине и противоположно направленные, измеряют приращение расстояния между дисками колёс и по величине и характеру изменения отношения этого приращения к нагружающему усилию производят оценку эксплуатационного состояния рулевого привода.
Под эксплуатационным состоянием РП понимается совокупность характеристик - упругость, момент сил трения, кинематика РП и технического состояния - величина износов и деформаций сопряжений, ослабление креплений и изменение прочностных свойств деталей, дефекты сборки. Предложенный параметр назван критерием качества РП - S F и является интегральным (комплексным) показателем характеристик и состояния рулевого привода автомобилей.
Способ испытания рулевого привода автомобилей осуществляется следующим образом. Автомобиль устанавливается управляемыми колёсами на поворотные площадки, задние колёса фиксируются колодками. Затем между дисками управляемых колёс впереди передней оси в горизонтальной плоскости на высоте рулевого привода устанавливается пневмоцилиндр, создающий одинаковые по величине, противоположно направленные усилия.
В ресивере создаётся постоянное давление в 0,5 МПа, откуда с помощью редуктора в пневмоцилиндр плавно подаётся воздух, обеспечивая равномерное приращение величины усилия. Одновременно и непрерывно с созданием усилий между внутренними сторонами дисков управляемых колёс измеряется приращение расстояния между ними. Оценка эксплуатационного состояния РП производится по величине и характеру изменения отношения приращения расстояния между дисками к приращению усилия между ними при установке управляемых колёс в ряд угловых положений в обе стороны
Таким образом, реализация силового способа позволяет повысить достоверность и точность оценки эксплуатационного состояния рулевого привода, исключив влияние дисперсии упругих свойств шин и деформации деталей РУ не связанных с РП [140]. Это позволяет добиться стабильности результатов измерения и осуществить комплексное исследование влияния характеристик и состояния рулевого привода на эксплуатационные свойства автомобилей. Экспериментальное оборудование позволило получить непрерывную графическую запись зависимости изменения критерия качества РП, пример которой для автомобиля с аварийным техническим состоянием РП приведен на рисунке 5. Здесь показана тарировочная характеристика устройства - 1, зависимости изменения смещений в РП от величины прикладываемого усилия на прямом - 2 и обратном - 3 ходе штока силового пневмоцилиндра. Заштрихованные площади могут быть пересчитаны в работу упругих деформаций и зазоров в сочленениях РП.
На рисунке 6 показана зависимость изменения смещении в кинематической цепи РП от усилия в нём, пересчитанная с учётом масштабных коэффициентов и тарировочной характеристики в декартову систему координат с непосредственной графической зависимости, полученной автомобиля, эксплуатационное состояние которого соответствовало нормативным требованиям (пробег 2тыс.км), на который были установлены крайние рулевые шарниры с зазорами 0,170-0,175 мм.
Из рисунка 6 следует возможность раздельного определения зазоров и деформаций в подвижных спряжениях РП. Так, люфту соответствует наибольшее и скачкообразное смещение на единицу создаваемого усилия, что характеризуется углом наклона зависимости -  при усилии 16-18 даН.
при усилии 16-18 даН.
Упругая деформация элементов подвижных сопряжении (не деталей, для деформации которых необходимо гораздо большее усилие) характеризуется плавным и стабильным смещением на единицу силы и меньшим углом -  . Преодоление вязкого трения характеризуется наименьшим углом -
. Преодоление вязкого трения характеризуется наименьшим углом -  (рис.6).
(рис.6).
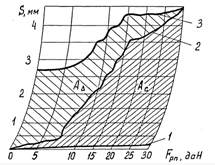
Рис.5. Графическая зависимость изменения критерия качества РП, полученная экспериментально: I - тарировочная характеристика устройства, 2 и 3 - зависимости на прямом и обратном ходе
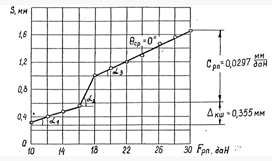
Рис. 6. Зависимость изменения критерия качества РП, пересчитанная в декартову систему координат для модели "Москвич – 2140"
Кинематика рулевого привода оценивается в условиях силового нагружения по соотношению углов поворота управляемых колёс при установке их в заданное угловое положение в обе стороны на один и тот же угол путём сравнения приращения расстояний между ними с расстоянием между дисками управляемых колёс в положении прямолинейного движения.
Поворот управляемых колёс осуществляется как рулевым колесом, так и приложением усилий к управляемым колёсам, причём в определённых режимах испытания это позволит увеличить объём информации, т.к. подвижные сопряжения реагируют на усилие поочерёдно, в соответствии с коэффициентами приведения смещений к радиусу диска колеса [4]. При правильной кинематике РП гистограмма (рис.7) будет симметричной.
Характер износа, т.е. геометрию износа подвижных сопряжений можно оценить по величине приращения расстояния между 'дисками (а не по абсолютной величине расстояния) после создания усилия между ними также при установке колёс в ряд угловых положений. Так, из диаграммы (рис.8) следует неравномерность износа подвижных сопряжении и эксплуатация автомобиля с уводом вправо от заданной траектории движения.
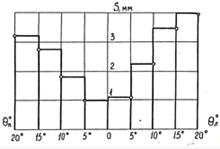
Рис.7. Гистограмма абсолютных величин смещений в кинематической цепи рулевого привода, полученных при установке управляемых колёс в ряд фиксированных положений в обе стороны
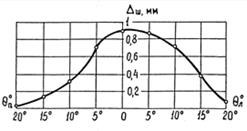
Рис. 8. Диаграмма величин зазоров (люфт) в шарнирных сопряжениях рулевой трапеции, полученная при установке управляемых колёс в ряд фиксированных положений в обе стороны
Дата: 2019-12-10, просмотров: 312.