Содержание
1. Исследование влияния смещений в кинематической цепи рулевого привода на работу и момент сил трения
2. Расчёт пути трения и скорости относительного скольжения элементов шарниров рулевых тяг
3. Исследование зависимости изменения схождения управляемых колёс от упругости, зазоров в сопряжениях и усилия в рулевом приводе
4. Силовой способ оценки характеристик и состояния рулевого привода
5. Теоретическое обоснование критериев оценки эксплуатационного состояния рулевого привода и шарниров рулевых тяг
5.1 Обоснование критерия качества рулевого привода
5.2 Обоснование критериев оценки эксплуатационного состояния шарниров рулевых тяг с осевой пружиной
Библиографический список
Теоретическое обоснование критериев оценки эксплуатационного состояния рулевого привода и шарниров рулевых тяг
Шарнир рулевой привод трение скольжение
Библиографический список
1. Власов B.M. Организация технического контроля и диагностики в региональных автотранспортных системах. - Автомобильный и городской транспорт. (Итоги науки и техники. ВИНИТИ). - М.: 2006. - №11. - С. 1-66.
2. Волошин Г.Я. Анализ дорожно-транспортных происшествий / Г.Я. Волошин, В. П. Мартынов, А. Г. Романов. – М.: Транспорт, 2007. – 240 с.
3. Герами В.Д. Концепция формирования системы городского пассажирского общественного транспорта / В.Д. Герами // Автотранспортное предприятие. – 2008. - №5. - С. 8.
4. Говорущенко Н.Я. Диагностика технического состояния автомобилей / Н.Я. Говорущенко. - М.: Транспорт, 2010. – С. 54.
5. Гольд Б.В. Прочность и долговечность автомобиля / Б.В. Гольд. - М.: Машиностроение, 2008. – С. -328.
6. Денисов А.С. Основы формирования эксплуатационно-ремонтного цикла автомобилей / А.С. Денисов. – Саратов: Сарат. гос. техн. ун-т, 2009. – 352 с.
7. Дмитриев С.Н. Дорожно-патрульная служба: Пособие для сотрудников ГИБДД / С.Н. Дмитриев. – М.: Спарк, 2010. – 656 с.
8. Иванов В.Н. Пассивная безопасность автомобиля / В.Н. Иванов, В.А. Лялин. – М.: Транспорт, 2009. – 304 с., ил., табл.
9. Иларионов В.А. Стабилизация управляемых колес автомобиля / В.А. Иларионов. – М.: Транспорт, 2006. – 167 с.
10. Келдыш М.В. Шимми переднего колеса трехколесного шасси. - М: Бюро новой техники НКАП, 2008. – С. 1-32.
11. Клинковштейн Г.И. Организация работы службы безопасности движения на автомобильном транспорте: Учеб. пособие / Г.И. Клинковштейн, М.А. Луковецкий. – М.: МАДИ, 2010. – 73 с.
Содержание
1. Исследование влияния смещений в кинематической цепи рулевого привода на работу и момент сил трения
2. Расчёт пути трения и скорости относительного скольжения элементов шарниров рулевых тяг
3. Исследование зависимости изменения схождения управляемых колёс от упругости, зазоров в сопряжениях и усилия в рулевом приводе
4. Силовой способ оценки характеристик и состояния рулевого привода
5. Теоретическое обоснование критериев оценки эксплуатационного состояния рулевого привода и шарниров рулевых тяг
5.1 Обоснование критерия качества рулевого привода
5.2 Обоснование критериев оценки эксплуатационного состояния шарниров рулевых тяг с осевой пружиной
Библиографический список
Исследование влияния смещений в кинематической цепи рулевого привода на работу и момент сил трения
Выходной характеристикой рабочих процессов в рулевом приводе автомобилей можно считать величину изменения угла схождения управляемых колёс и соотношения их углов поворота. Обе величины в процессе эксплуатации изменяются в зависимости от ряда конструктивных и эксплуатационных факторов.
Рабочие процессы в РП, имеющем звенья, сопряжённые силовым замыканием с упругой связью [3], сопровождаются непрерывными относительными смещениями элементов, которые происходят под действием переменных по величине и направлению поперечных, касательных и вертикальных сил, создающих поворачивающие моменты относительно оси поворотной стойки передней подвески.
В зависимости от соотношения суммарных моментов, действующих на каждое управляемое колесо, в рулевом приводе автомобилей с рулевой трапецией, расположенной сзади передней оси, возникает растяжение, причём начальное схождение увеличивается или сжатие - уменьшается.
Таким образом, характеристикой рабочих процессов в РП является работа, затраченная на преодоление сил трения в подвижных сопряжениях РП и выборку смещений в его кинематической цепи. При этом, полезной работой считается израсходованная на обеспечение курсовой устойчивости, т.е. на гашение колебаний управляемых колес, вызванных стохастическими нагрузками.
Эту работу в основном производят обратимые смещения, обусловленные упругостью РП, она выполняется без участия водителя в режимах движения по траектории, близкой к прямолинейной, когда выполняется большая часть транспортной работы.
Часть же работы, затраченной водителем на обеспечение заданной траектории движения, расходуется на преодоление необратимых смещений, вызванных зазорами в подвижных сопряжениях рулевого привода.
Эта работа затрачивается непроизводительно, уменьшает силовое передаточное число РУ, вызывает увеличение утомляемости водителя и интенсивности износа шарниров рулевых тяг, резко снижает заданный при проектировании автомобиля уровень эксплуатационных свойств.
В процессе движения автомобиля работа сил, прилагаемых к рулевому колесу для поддержания заданной траектории движения, затрачивается на изменение кинетической энергии поворота рулевого вала и связанных с ним деталей, а также поворота управляемых колёс. При этом преодолеваются активные силы, вызванные влиянием микропрофиля дорожного полотна, момент сопротивления управляемых колёс повороту, вызванный стабилизирующим моментом, и силы трения в подвижных сопряжениях рулевого привода, которые могут быть приведены к поворотному рычагу цапфы и выражены моментом трения.
Аналитическое выражение связи перечисленных сил, моментов и углов поворота следует из теоремы об изменении кинетической энергии системы рулевого управления и может быть представлено в виде равенства работ - затраченной на рулевом колесе и полученной на управляемых колёсах:
| (1) |
Примем допущения:
 и
и  ,
,
т.к.  в 10 в рассматриваемых режимах движения.
в 10 в рассматриваемых режимах движения.
Угол поворота управляемого колеса с учётом угла поворота рулевой сошки на величину смещений в кинематической цепи РП равен:
| (2) |
Тогда выражение (1) принимает вид:
| (3) |
При установившемся движении рулевого колеса равенство работ, совершённых в рулевом приводе на рулевой сошке и управляемых колёсах учётом момента сил трения в подвижных сопряжениях РП имеет вид:
  . .
| (4) |
Отсюда получаем зависимости влияния величины смещений в РП на:
а) угол поворота управляемого колеса:
 ; ;
| (5) |
б) момент сил трения в подвижных сопряжениях рулевого привода:
| (6) |
Из выражения (5) следует, что с увеличением смещений в РП, являющихся основным параметром технического состояния рулевого привода, уменьшается угловое передаточное число рулевого управления, т.е. уменьшается угол поворота управляемых колёс на единицу поворота рулевого колеса. Из выражения (6) следует, что при этом также уменьшается и момент сил трения в подвижных сопряжениях РП, что порождает ударный характер нагружения и прогрессивное увеличение смещений в РП.
Эти причины вызывают увеличение суммарного угла поворота рулевого колеса для поддержания заданной траектории движения на единицу пути, часть которого служит для компенсации люфтов в рулевом управлении. В этом случае уравнение работ, затраченных в рулевом приводе только на преодоление сил трения в подвижных сопряжениях и компенсацию смещений в них, с учётом (3), принимает вид:

| (7) |
Отсюда путём интегрирования при известных начальных условиях можно получить выражение зависимости угла поворота УК от смещений в кинематической цепи рулевого привода автомобиля.
Шарниры рулевых тяг, учитывая их количество, являются основными элементами, формирующими смещения в кинематической цепи рулевого привода автомобилей. Это определяет необходимость анализа работ сил трения в них, которые можно определить как разность работ, совершаемой рулевой сошкой и полученной на поворотных рычагах цапф.
При этом элементарная работа определяется:
а) рулевой сошки:  (8)
(8)
б) поворотного рычага:  (9)
(9)
Для определения этих работ необходимо представить моменты на рулевой сошке и поворотном рычаге функциями их углов поворота. С этой целью введём коэффициент пропорциональности нарастания момента относительно угла поворота (то же - усилия в РП относительно смещения в нём), физический смысл которого следует из диаграммы (рис.1) равен:
 . .
| (10) |
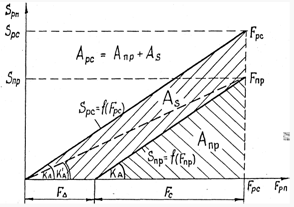
Рис.1. Диаграмма работ: затраченной на рулевой сошке на преодоление необратимых смещений в РП и полученной на поворотном рычаге.
Тогда работа, затраченная на рулевой сошке и полученная на поворотном рычаге цапфы, будет равна, соответственно:
 , ,
| (11) |
 . .
| (12) |
Работа сил трения для обеих половин рулевого привода равна:
 . .
| (13) |
Учитывая, что угол поворота рулевой сошки можно выразить:
 . .
| (14) |
Выражение (13) может быть приведено к виду:
| (15) |
Исходя из физических процессов, протекающих в рулевом приводе, разделим всю область смещений в РП и соответствующих им усилий на четыре диапазона согласно диаграмме (рис.2). В первом диапазоне преобладают предварительные смещения, вызванные силами вязкого трения в подвижных сопряжениях РП. Их величина незначительна (до 0,15 мм), они полностью выбираются при усилии 10 Н.
Во втором диапазоне преобладают необратимые смещения, вызванные наличием зазоров в сопряжениях носящие износный характер. Их величина не превышает 1,5-2 мм для технически исправных автомобилей при усилии 30-50 даН, после снятия которого они не компенсируются.
В третьем диапазоне имеют место обратимые смещения, вызванные упругостью элементов РП. Они достигают 8-10 мм при средне эксплуатационных нагрузках в РП не выше 300 даН, после снятия которых они компенсируются. В четвертом диапазоне имеют место только остаточные смещения, вызванные пластическим деформированием деталей и являющиеся критерием прочностных свойств.
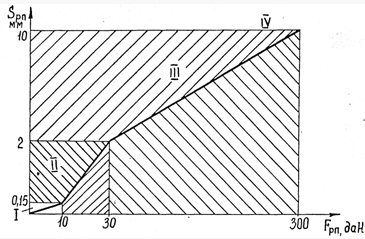
Рис.2. Диаграмма диапазонов усилий и смещений в кинематической цепи РП, вытекающая из физических процессов в рулевом приводе
Таким образом, при условии, что поворот рулевой сошки происходит в пределах смещений в кинематической цепи РП, учитывая принятые ранее допущения, работа, затраченная на преодоление моментов трения в подвижных сопряжениях, зазоров и упругости РП, равна:
 , ,
| (16) |
Или
 . .
| (17) |
Тогда момент сил трения в сопряжениях рулевого привода равен:
 . .
| (18) |
Поэтому для рассматриваемого случая поворота рулевой сошки на величину смещений в РП, работа сил трения может быть определена:
 , ,
| (19) |
что представляет удобство для экспериментальных исследований, в условиях которых коэффициент Ка равен критерию качества РП.
Дата: 2019-12-10, просмотров: 359.