Основные соотношения величин, которые характеризуют физические явления, лежащие в основе работы электрических машин (электродвигателя и генератора), можно получить на основании законов Ампера и Фарадея [1].
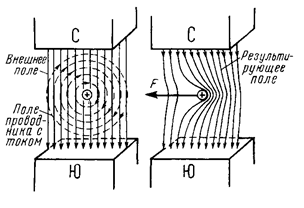
Рассмотрим действие однородного магнитного поля, созданного полюсами С и Ю, на проводник с током I. Вокруг проводника возникает магнитное поле, направление которого определяется по правилу буравчика (рис.2.1,а). Справа от проводника, где направления линий магнитного поля проводника и полюсов совпадают, происходит сгущение линий и, следовательно, увеличение магнитной индукции поля. Слева от проводника, где магнитные линии поля проводника и внешнего поля направлены навстречу друг другу, происходит разрежение магнитного поля (уменьшение магнитной индукции). Вследствие упругости, магнитные линии стремятся сократиться по длине и выталкивают проводник с током из области сгущения линий в область разрежения (рис.2.1,б).
 |
Действие магнитного поля на проводник (а,б) и виток (в) с током
 |
а) б) в)
Рис.2.1.
Результирующая электромагнитная сила F, действующая на проводник, определяется законом Ампера: электромагнитная сила, действующая на проводник с током, находящийся в магнитном поле и расположенный перпендикулярно направлению поля, равна произведению силы тока I, индукции магнитного поля B и длины проводника L
F=B.I.L. (2.1)
Из формулы (2.1) следует, что B=F/(I.L). Таким образом, магнитная индукция, количественно характеризующая интенсивность магнитного поля, равна максимальной силе, действующей в магнитном поле на участок единичной длины проводника, по которому течет ток силой 1 А.
В системе СИ единица измерения магнитной индукции В - тесла.
1 Тл = 1 Н /(1 м х 1 А) .
Направление действия электромагнитной силы F определяют по правилу левой руки: ладонь левой руки нужно расположить так, чтобы магнитные линии входили в нее, и четыре вытянутых пальца совместить с направлением тока; тогда расположенный под углом большой палец укажет направление действия силы F.
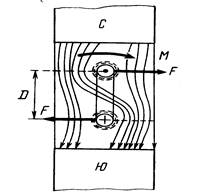
Если вместо проводника поместить в магнитное поле виток с током и применить к нему правило левой руки, получим, что электромагнитные силы F, действующие на нижнюю и верхнюю стороны витка, будут направлены в разные стороны (рис.2.1,в). В результате действия этих двух сил возникает электромагнитный вращающий момент М на плече D.cosα
М=F.D.cosα, Н.м, (2.2)
где D - расстояние между сторонами витка;
α - угол между направлениями линий магнитного поля и плоскости витка.
Наибольший вращающий момент будет иметь место, когда виток с током пересекает линии магнитного поля (α=0о,180о), а наименьший - когда через площадь, ограниченную витком, проходит наибольший магнитный поток (α=90о,270о).
Свойство рамки с током поворачиваться в магнитном поле лежит в основе создания электродвигателей, преобразующих электрическую энергию в механическую.
При пересечении проводником магнитных силовых линий в нем возникает или индуцируется электродвижущая сила (ЭДС). Это явление носит название электромагнитной индукции.
ЭДС, действующая в проводнике, представляет собой разность потенциалов на его концах и, следовательно, измеряется в вольтах (В).
ЭДС индуцируется в проводнике независимо от того, включен ли он в замкнутую цепь или нет. При замыкании цепи проводника в нем потечет электрический ток, вызванный ЭДС.
Явление электромагнитной индукции лежит в основе создания генераторов - электрических машин для преобразования механической энергии в электрическую.
Значение ЭДС, индуцированной в проводнике, определяется законом электромагнитной индукции Фарадея: ЭДС, наведенная в проводнике, прямо пропорциональна индукции магнитного поля В, длине проводника L и скорости его перемещения в направлении, перпендикулярном силовым линиям.
Направление ЭДС индукции определяют по правилу правой руки: если ладонь правой руки держать так, чтобы в нее входили магнитные силовые линии поля, а отогнутый большой палец совместить с направлением движения проводника, то вытянутые четыре пальца укажут направление индуцированной ЭДС.
В проводниках витка, движущихся в магнитном поле с постоянной окружной скоростью V, наводится ЭДС, переменная как по величине, так и по направлению (рис.2.2):
е=B.V.L.cosα, В, (2.3)
где α - угол между направлениями линий магнитного поля и плоскости витка.
При α=0о,180о проводники I и II движутся перпендикулярно силовым линиям магнитного поля; в этом положении витка разность потенциалов на его концах А и Б, то есть ЭДС, максимальна. При α=90о,270о проводники I и II перемещаются вдоль силовых линий поля, поэтому ЭДС в витке равна нулю.
В момент прохождения углов α=90о,270о изменяются направления движения проводников I и II относительно линий магнитного поля. Поэтому, в соответствии с правилом правой руки, изменяется направление ЭДС в витке и, следовательно, полярность его концов А и Б (см. рис.2.2).
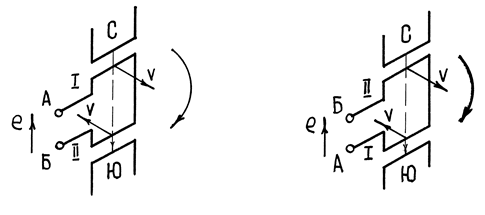 |
Рис.2.2. Электродвижущая сила в витке, вращающемся в магнитном поле
Таким образом, в витке с током, находящемся в переменном магнитном поле, возникает электродвижущая сила. Одновременно на проводники витка действуют электромагнитные силы. Эти процессы являются основой функционирования электрических машин, то есть устройств для взаимного преобразования электрической и механической энергий.
Неразрывная связь электромагнитных явлений, вызванных взаимодействием магнитных полей полюсов и витка с током, обусловливает свойство обратимости электрических машин постоянного тока. Оно заключается в том, что любая машина может работать как генератором, так и двигателем и может переходить из генераторного режима в двигательный и наоборот. Указанное свойство широко используется на локомотивах. Например, на тепловозах тяговый генератор работает в режиме двигателя (стартера) при запуске дизеля, а тяговый двигатель - в режиме генератора при электродинамическом торможении [2].
В связи с наличием у электрических машин постоянного тока свойства обратимости, принцип действия машины более подробно рассмотрим на примере электродвигателя.
Принцип действия и общее устройство электродвигателя постоянного тока
Электродвигатель - это электрическая машина, предназначенная для преобразования электрической энергии в механическую. Если двигатель получает питание напряжением постоянной полярности, то он называется двигателем постоянного тока.
Простейшая схема такого двигателя приведена на рис.2.3, где в двухполюсной магнитной системе расположена обмотка якоря (показаны два последовательно соединенных элементарных проводника, образующих виток, концы которого подключены к двум пластинам коллектора К1 и К2). Подвод напряжения к коллектору осуществляется щетками Щ1 и Щ2.
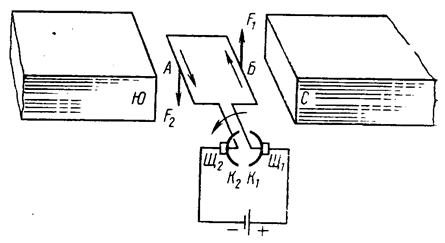
Рис.2.3. Схема простейшего электродвигателя постоянного тока
Непрерывное взаимодействие магнитного поля, создаваемого полюсами С и Ю, и магнитного поля якоря, возникающего при протекании по его обмотке тока Iд, обусловливает возникновение электромагнитных сил F1, F2 и вращающего момента на валу якоря. Одновременно в якорной обмотке индуцируется ЭДС, которая направлена, в соответствии с правилом правой руки, навстречу подводимому к двигателю напряжению (эту ЭДС иногда называют противо-ЭДС двигателя).
Таким образом, подводимое к электродвигателю напряжение стремится создать ток в обмотке якоря, чему препятствует индуцируемая ЭДС. Поэтому величина тока Iд в обмотке якоря работающего электродвигателя будет определяться не подводимым к ней напряжением Uд, а разностью между напряжением и наведенной в обмотке якоря ЭДС Ед:
Iд=(Uд-Eд)/Rд, А, (2.4)
где Rд - суммарное сопротивление якорной цепи, Ом.
Из рис.2.3 видно, что ток Iд в якорной обмотке направлен от коллекторной пластины К1 (щетка Щ1 «+») к коллекторной пластине К2 (щетка Щ2 «-»). При повороте витка на угол 180о пластина К1 переходит под щетку Щ2 «-», а пластина К2 - под щетку Щ1 «+». Это приводит к изменению направления тока в витке на противоположное - от пластины К2 к пластине К1. Одновременно в витке меняется направление ЭДС индукции (в соответствии с правилом правой руки). Такое переключение направления тока в витке якорной обмотки происходит при каждом переходе элементарного проводника из зоны действия северного полюса С в зону действия южного полюса Ю и наоборот. Процесс переключения, называемый коммутацией, осуществляется коллекторно-щеточным узлом.
Следовательно, коллектор электродвигателя преобразует постоянный ток внешней цепи в переменный ток якорной обмотки. Примечательно, что коллектор электрического генератора постоянного тока преобразует переменный ток якорной обмотки в постоянный ток внешней цепи, то есть служит механическим выпрямителем.
Количество коллекторных пластин зависит от характеристик обмотки якоря, которая состоит из множества витков, соединенных друг с другом и с пластинами коллектора по определенной схеме. К числу характеристик якорной обмотки относят [1]:
количество проводников якорной обмотки N;
число параллельных ветвей обмотки 2а.
Кроме того, конструкцию электрической машины постоянного тока характеризует такой параметр, как число главных полюсов 2р.
Главные полюсы обеспечивают создание рабочего магнитного поля в электромашине. Для усиления и регулирования магнитной индукции поля В в качестве главных полюсов используют электромагниты. Обмотки электромагнитов называют обмотками возбуждения, а ток, протекающий по ним, - током возбуждения. С увеличением тока возбуждения возрастает магнитная индукция поля В и магнитный поток возбуждения Ф (величины Ф и В прямо пропорциональны друг другу).
Помимо главных полюсов, в конструкции мощных электродвигателей предусмотрены добавочные полюса, действие которых улучшает процессы коммутации. Обмотки этих полюсов включают последовательно с якорной обмоткой.
Главные и добавочные полюсы, остов, якорь и воздушный зазор между якорем и полюсами образуют магнитную цепь двигателя (рис.2.4.).
В качестве тяговых электродвигателей на отечественных локомотивах обычно используют двигатели постоянного тока последовательного возбуждения. В двигателях этого типа обмотки главных, дополнительных полюсов и якоря соединены последовательно (рис.2.5, а). Иногда на электрических схемах обмотку якоря электродвигателя совмещают с обмоткой дополнительных полюсов (рис. 2.5, б).
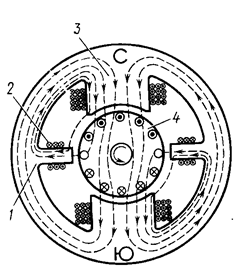
Рис.2.4. Магнитная цепь электродвигателя постоянного тока. 1 – добавочный полюс; 2 – обмотка возбуждения добавочного полюса; 3 – главный полюс с обмоткой возбуждения; 4 – якорь с рабочей (якорной) обмоткой
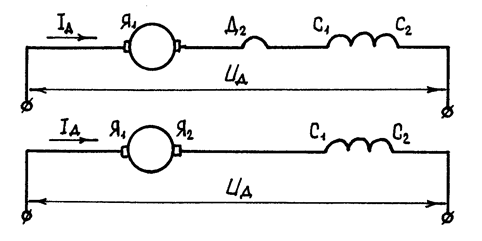
Рис.2.5. Графическое изображение двигателей в электрических схемах
Я1-Д2 - обмотка якоря и добавочных полюсов;
С1-С2 - обмотка возбуждения главных полюсов
Реверсирование тягового двигателя, то есть изменение направления вращения его якоря, можно осуществить путем изменения направления тока в обмотках возбуждения Iв либо в обмотке якоря Iд. На локомотивах нашел применение первый из этих способов – изменением направления тока в обмотках возбуждения, которое осуществляют с помощью специального электрического аппарата - реверсора (рис.2.6).
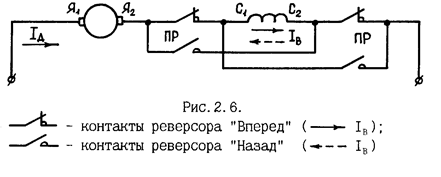
Рис. 2.6. Схема реверсирования тягового двигателя локомотива
При одновременном изменении направления тока в обмотках якоря и главных полюсов направление вращения вала электродвигателя не меняется.
Основные параметры и показатели работы электрических двигателей
Одним из наиболее важных параметров электродвигателя является его мощность. Чем большую мощность развивает электродвигатель, тем больший ток проходит по его обмоткам и, в соответствии с законом Джоуля-Ленца, больше тепла выделяется в проводниках. В результате теплового действия тока обмотки и другие детали двигателя нагреваются, их температура становится выше температуры окружающей среды.
Предельно допустимые превышения температур частей электрических машин по отношению к температуре окружающей среды не должны превышать норм, регламентированных ГОСТом. В зависимости от времени, в течение которого части двигателя, работающего в условиях нормально действующей вентиляции, нагреваются до максимально допустимой температуры, ввели понятия продолжительной и часовой мощности [3].
Продолжительной называют наибольшую мощность, которую может развивать двигатель в течение неограниченного времени без повышения температуры частей двигателя сверх максимально допустимого значения.
Под часовой понимают наибольшую мощность, которую может развивать двигатель в течение одного часа без повышения температуры частей двигателя сверх максимально допустимого значения. При этом полагают, что температура частей двигателя в начале испытания равна температуре окружающей среды, которую считают равной 25оС.
Параметры электрической машины: напряжение, сила тока, частота вращения вала якоря, к.п.д. - соответствующие работе при продолжительной мощности, называют длительными, а реализуемые при часовой мощности - часовыми. Обычно технические данные тяговых двигателей электровозов приводят для двух режимов: продолжительного и часового [3], а тяговых двигателей тепловозов - для одного режима: продолжительного [4]. Поэтому далее будем считать, что номинальным режимом работы тяговых электромашин тепловозов является продолжительный режим, а электровозов - часовой.
Мощность электрического двигателя, развиваемая на номинальном режиме
Рдн=Uдн.Iдн.ηдн.10-3, кВт, (2.5)
где Uдн ,Iдн , ηдн - номинальные значения напряжения, силы тока и к.п.д. двигателя.
Значение к.п.д. ηдн, оценивающее потери энергии при работе машины, для локомотивных тяговых двигателей составляет 90-94%.
Различают три составляющие потерь энергии в электрической машине: электрические, магнитные и механические. Электрические потери в двигателе обусловлены сопротивлением обмоток якоря и полюсов, а также коллекторно-щеточного узла прохождению тока. Магнитные потери обусловлены возникновением вихревых токов Фуко в массивных деталях двигателя, сопротивлением магнитному потоку воздушных промежутков в магнитной цепи электродвигателя и гистерезисом. Механические потери связаны с трением в подшипниковых узлах и аэродинамическим сопротивлением, возникающими при вращении якоря.
Режим работы электродвигателя, при котором величина силы тока превышает допустимые значения, называется перегрузочным. Он ведет к сокращению срока службы электрической машины вследствие перегрева и снижения прочности изоляции ее обмоток.
В соответствии с формулой (2.4), значение силы тока в якорных обмотках двигателя Iд взаимосвязано с режимами работы локомотива, а также характеристиками электродвигателя. Зависимость между напряжением Uд, приложенным к двигателю, и силой тока Iд определяется законами Ома и Кирхгофа:
Uд=Eд+Iд.Rд, В, (2.6)
где Eд - ЭДС, индуцируемая в якорной обмотке, В;
Iд.Rд - падение напряжения в электродвигателе при прохождении по нему тока (составляет примерно 0,04.Uд), В;
Rд - суммарное сопротивление якорной цепи двигателя, Ом.
Фундаментальные законы физики: законы Ампера (2.1),(2.2) и Фарадея (2.3), - рассмотренные в п.2.1 применительно к отдельному витку (проводнику), для электрического двигателя со сложной якорной обмоткой имеют вид:
Ед = Се.Фд.nд, В; (2.7)
Мэ=См.Фд.Iд, Н.м, (2.8)
где Мэ - электромагнитный момент на валу двигателя (вращающий момент без учета механических потерь в двигателе);
Фд - магнитный поток возбуждения двигателя, Вб;
nд - частота вращения вала якоря, об/мин;
Се,См - конструктивные постоянные двигателя для расчета ЭДС и
вращающего момента соответственно.
Се=(p.N)/(60.a); (2.9)
См=(p.N)/(2.p.a), (2.10)
где р - число пар главных полюсов двигателя;
N - количество проводников якорной обмотки;
а - число пар параллельных ветвей якорной обмотки.
Формулы (2.5)-(2.10) создают основу для расчетов рабочих характеристик электродвигателей (раздел 5).
Дата: 2019-12-22, просмотров: 409.