Блок управления шаговым двигателем SMD-42 (рис. 15) предназначен для управления двух и четырехфазными гибридными шаговыми двигателями. Блок обеспечивает высокую точность, высокую скорость и низкий уровень вибрации. Область применения: приборостроение, робототехника и др.

Рис. 15. Блок управления шаговым двигателем SMD-42.
Принцип подключения четырехфазного шагового двигателя ДШИ-200-3 к блоку управления SMD-42 показан на рис. 16:
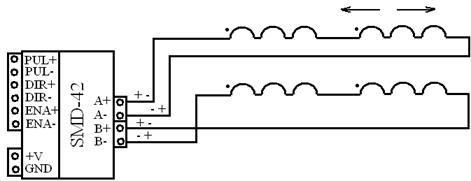
Рис. 16.
Конец первой фазы соединяем с началом второй. Начало третьей фазы – с концом четвертой.
Таблица 3 Технические характеристики блока управления SMD-42.
| Параметр | Минимальный | Максимальный |
| Напряжение питания, В | 20 | 50 |
| Максимальный выходной ток, А | 1,0 | 4,2 |
| Входной ток управляющих сигналов, мА | 7 | 16 |
| Максимальная входная частота, кГц | 0 | 30 |
| Температура окружающего воздуха, °С | 0 | 50 |
| Относительная влажность воздуха, % | 40 | 90 |
| Масса, кг | 0,28 | |
В блоке используются дифференциальные входы для улучшения помехоустойчивости и гибкости интерфейса. Интерфейс позволяет принимать однонаправленные управляющие сигналы от контроллера.
Для питания блока могут использоваться стабилизированные и нестабилизированные источники питания постоянного тока. Для снижения общей стоимости возможно использование нескольких блоков с одним источником питания.
Блок позволяет дробить шаг до 1/128. Предусмотрена возможность устанавливать ток удержания (половина/полный от значения рабочего тока).
Блок поддерживает два режима управления ШД:
· Управление ШД от внешнего устройства, посредством логических сигналов: “ШАГ”, “НАПРАВЛЕНИЕ” и “РАЗРЕШЕНИЕ”. Подача сигналов осуществляется импульсами.
· Управление ШД от компьютера осуществляется через LPT-порт с использованием программы StepMotor_LPT.
StepMotor_LPT позволяет:
1) задавать и отрабатывать необходимое количество шагов, либо осуществлять непрерывное вращение;
2) осуществлять выбор направления вращения ротора шагового двигателя;
3) осуществлять выбор скорости вращения шагового двигателя;
4) определять положение ротора шагового двигателя;
5) а также определять число фактически отработанных шагов, время и скорость вращения шагового двигателя;
Программируемый контроллер SMC-3-1 (рис. 17) предназначен для управления шаговыми приводами. Контроллер SMC-3-1 включает в себя 3 независимых канала управления приводами. Каждый из каналов выполнен на микроконтроллере ATMega8 и работает по исполнительной программе, содержащейся в энергонезависимой памяти микроконтроллера. Исполнительная программа записывается от ПК через интерфейс RS232.
Рис. 17. Программируемый контроллер SMC-3-1.
Контроллер SMC-3-1 выполнен в виде платы (рис. 18) с расположенными на ней электронными компонентами, элементами индикации, органами управления, клеммами и разъемами.
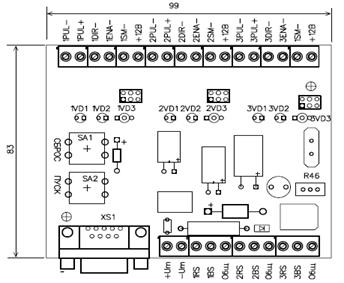
Рис. 18. Конструкция SMC-3-1.
Кроме электронных компонентов на плате располагаются:
- винтовые клеммы для подключения соединительных проводов линий управления, сигнализации и питания;
- разъем XS1 для связи с компьютером;
- кнопки SA1 и SA2 «СБРОС» и «ПУСК»;
- подстроечный резистор R46 для управления скоростью вращения двигателей в ручном режиме;
- светодиодные индикаторы nVD1 – nVD3 для индикации режимов работы устройства.
Для уменьшения помех и увеличения длины линий связи устройство имеет балансные выходы по линиям импульсов переключения nPUL.
Каждый из каналов устройства имеет 4 выходных линии управления входами драйверов и 2 входных линии сигнализации.
Назначение линий приведено в таблице 4.
Таблица 4
| nPUL- | Выход импульсов |
| nPUL+ | Выход импульсов инверсный |
| nDIR- | Выход переключения реверса |
| nENA- | Выход разрешения двигателя |
| nSM- | Выход установки микрошага |
| +12B | Питание входов управления драйвера ШД |
| nRS | Вход переключателя реверса |
| nBS | Вход аварийного выключателя |
| Общ. | Общий |
| +Um | «Плюс» источника питания |
| -Um | «Минус» источника питания |
Контроллер может работать как автономно (вручную), так и от ПК. Предусмотрена возможность синхронизации работы двигателей, подключенных к блоку управления SMC-3-1.
Дата: 2019-12-10, просмотров: 394.